
Fターム[5H180LL04]の内容
Fターム[5H180LL04]に分類される特許
2,001 - 2,020 / 2,931
運転支援装置及び運転支援システム
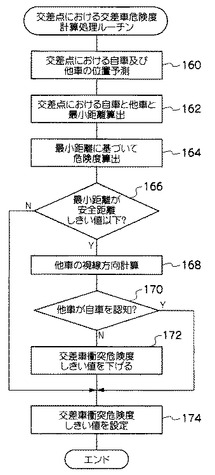
【解決課題】他車との衝突の危険を高精度に判定することができるようにする。
【解決手段】交差点における自車側車両と他車側車両との位置予測を行い(160)、交差点において自車側車両と他車側車両とが最も接近したときの最小距離を算出し(162)、算出された最小距離に基づいて、交差点における他車側車両との衝突の危険度を算出する(164)。そして、他車側車両のドライバが自車を認知しているか否かを判定し(170)、視線の方向に自車がなく、自車を認知していないと推定される場合には、予め定められた交差車衝突危険度しきい値を所定値だけ下げるように変更し(172)、予め定められた交差車衝突危険度しきい値又は変更された交差車衝突危険度しきい値を衝突の危険を判定する際のしきい値として設定して、交差車との衝突の危険があるか否かを判定する。
(もっと読む)
車両状況記録装置

【課題】車両の使用の程度と関連した作動機器の作動状況を記録することができる車両状況記録装置を提供する。
【解決手段】第1プリテンショナ機構2cと、該第1プリテンショナ機構2cが作動したことを記録する記録部94及びEEPROM95と、車両Vの積算使用時間を計測する積算使用時間計測部92とを備え、記録部94は、第1プリテンショナ機構2cの作動を該第1プリテンショナ機構2cが作動したときに積算使用時間計測部92によって計測されている車両の積算使用時間と共にEEPROM95に記録する。
(もっと読む)
運転手の作業負荷レベルを判定するシステム及び方法
車両の運転手の作業負荷レベルを判定するシステム及び方法。システムはトランシーバと、測位装置と、コントローラとを含む。トランシーバは遠隔地からデータを受信できる。データは遠隔作業負荷レベルと遠隔作業負荷レベルに関連付けられた遠隔地理位置とを含む。測位装置は車両の現在位置を判定できる。コントローラは、車両の現在位置を遠隔地理位置に比較するよう構成される。車両の現在位置が遠隔地理位置の所定の範囲内にある場合、車両の作業負荷レベルは遠隔作業負荷レベルを少なくとも部分的に含む。 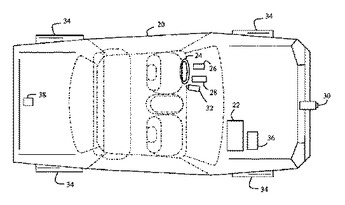 (もっと読む)
(もっと読む)
白線検出装置
【課題】簡単な画像処理で道路の白線を容易に検出できるようにする。
【解決手段】車体前端の左右方向を水平方向の撮像視野、車体幅の内側から車体幅の外側にわたる範囲を各垂直方向の撮像視野として撮像し、各画像に設定した画像認識エリア20L、20Rを水平方向に分割領域LA、LB、・・に分割し、画像上の白線K1、K3の湾曲度合いを吸収するよう分割領域ごとの画素を予め設定したクロスハッチングで示す量だけ垂直にシフトさせてから、水平ラインごとに画素の輝度値の累積値を求め、垂直方向に累積値のピークPを検出する。判定値Nxの垂直ラインを横切る点S1、S2間を線幅Dとして水平に延びる領域を白線候補HL、HRとして抽出し、線幅Dが予め設定した基準幅に最も近い白線候補を白線と決定する。輝度値を水平方向に積算してその累積値のピーク位置を求めるだけで白線の位置を検出でき、画像処理回路が簡単で済む。
(もっと読む)
物体検出装置
【課題】レベルの異なる2つの閾値を用いて高閾値物体と低閾値物体とを検出する場合の検知感度の拡大と物体検出の信頼性の確保とが可能な物体検出装置を提供すること。
【解決手段】検出された高閾値物体候補数Hth_Numと低閾値物体候補数Lth_Numとの総和が検出結果として出力可能に設定された所定の最大物体数Nmaxを超える場合に(ステップS4:Yes)、高閾値物体候補からの選択が優先されるように高閾値物体候補および低閾値物体候補からの選択処理を割り振って高閾値物体および低閾値物体を検出結果として選択するようにした(ステップS6〜S10)。
(もっと読む)
障害物検出方法、障害物検出装置及び標準移動体モデル
【課題】搭載センサによる障害物の検出が不可な遮蔽箇所があっても、該遮蔽箇所に対する対応を適正に行えるようにする。
【解決手段】自車両43の移動可能領域41L,42中で自車両43に搭載されたセンサで検出不可な遮蔽領域47があっても、遮蔽領域47には障害物が存在するかもしれないと想定し、障害物が存在し得る状況においては該遮蔽領域47に対して未確認物体46f〜46hを障害物候補として仮想的に配置することで、未確認物体46f〜46hによる障害物候補を用いて環境予測を行うことが可能となり、安全な自動運転化等の実現に役立てることができるようにした。
(もっと読む)
車両画像領域特定装置およびその方法
【課題】車両が他の物体の投射陰にあっても、不均一な照光があっても、又は車線がないなどの場合にも、画像に含まれる車両を含むように画像領域を特定する車両画像領域特定装置およびその方法を提供する。
【解決手段】車下陰に基づく車両画像領域特定装置であり、道路上の車両の走行状況を撮像した画像を入力する画像入力手段と、前記画像入力手段で入力した画像に対して勾配分布を算出する勾配分布検出手段と、前記画像の勾配情報に基づいて車下陰の候補領域を特定する車下陰の候補領域特定手段と、前記車下陰の候補領域に基づいて車両画像を含む画像領域ROIを特定する画像領域特定手段を有している。
(もっと読む)
車両用警報装置
【課題】運転者の脇見を検出した結果の有意性を考慮しつつ、運転者の脇見に対して適切に警報を行なうことが可能な車両用警報装置を提供すること。
【解決手段】運転者の脇見の程度を検出する脇見程度検出手段を備え、脇見程度検出手段により検出された運転者の脇見の程度に基づいて警報を行なう、車両用警報装置1であって、警報を行なうか否かについての判断基準を脇見程度検出手段による検出結果の有意性に基づいて設定する判断基準設定手段20を備え、判断基準設定手段20により設定された判断基準に従って警報を行なうことを特徴とする。
(もっと読む)
車線逸脱防止装置
【課題】自車両が停止を要する走行シーンを考慮して車線逸脱防止制御を行う。
【解決手段】車線逸脱防止装置は、走行車線に対した自車両が逸脱傾向にあると判定した場合(ステップS3、ステップS4)、自車両の制動力を制御して走行車線に対する自車両の逸脱を防止する車線逸脱防止制御を行う(ステップS7〜ステップS11)。ここで、自車両の停止の必要性が高いエリアまでの距離情報を検出し(ステップS6)、その検出した距離情報に基づいて、車線逸脱防止制御の制御内容を変更する(ステップS11)。
(もっと読む)
運転操作評価装置
【課題】車両の走行局面を考慮して運転者の運転操作を適正に評価することが可能な運転操作評価装置を提供すること。
【解決手段】運転者の運転操作を評価する運転操作評価装置1であって、自車両の周辺状況を検出する周辺状況検出手段と、自車両の状態を検出する車両状態検出手段と、周辺状況検出手段により検出された自車両の周辺状況、及び車両状態検出手段により検出された自車両の状態に基づいて、自車両の置かれた走行局面を判断する走行局面判断手段82と、車両状態検出手段により検出された自車両の状態に基づいて運転者の運転操作を評価する評価手段84と、を備え、評価手段84は、走行局面判断手段82により判断された自車両の走行局面に応じた評価方法を用いて運転者の運転操作を評価することを特徴とする。
(もっと読む)
動的衝突予測方法
【課題】動的衝突予測を従来技術より短い時間と少ない手間で、かつ演算処理回数を低減し、対象物の移動コースすなわち衝突位置を正確に予測する。
【解決手段】基準平面上に自己の2個の眼を離間配置し、時間軸上に所定の時間間隔(Δt)で選ばれた複数の時刻のうちのひとつの時刻(t)において視野内にある対象物の3次元位置と時刻(t)から(t+Δt)間における速度対を観測し、つぎの条件式が成立したときに「衝突する」と予測する。
−(a+b)≦XT≦b (条件式1)
Z0−Z>0 (条件式2)
ここでa,b,Z0,Zは図参照
XT=a tan δR/(tan α δL−tan α δR)
ここでαは1画素当りの視角であり、δLは対象物の左眼上での移動画素数であり、δRは対象物の右眼上での移動画素数である。
(もっと読む)
車両用走行支援装置
【課題】 さまざまな走行環境に適応した高精度な危険度の推定を実現し、もって信頼性の高い車両用走行支援装置を提供すること。
【解決手段】 撮像手段により車両前方の像を撮像し、その画像データを道路領域、路側帯領域、上空領域に分割する(S1)。分割された領域ごとに、領域に応じた観点の危険度を判定する(S2〜S10)。そして、判定された各危険度を、前記観点に応じた重み付け係数を用いて重み付け加算することで総合危険度を判定し(S11)、判定された前記総合危険度に基づき乗員に危険を報知する(S12)。
(もっと読む)
車両用駆動力制御装置
【課題】走行環境を走行するために適切な減速度に基づいて、運転者の減速意図に応答して減速制御を実施する車両用駆動力制御装置であって、減速の応答性に関して、運転者のフィーリングに合う減速制御を行なうことが可能な車両用駆動力制御装置を提供する。
【解決手段】車両の走行環境を検出する手段と、前記走行環境を走行するために適切な前記車両の減速度を設定減速度として求める手段(S101)と、運転者の減速意図を検出する手段(S104)と、前記運転者の減速意図が検出されたときに前記設定減速度に基づいて前記車両の駆動力を制御する手段(S108)とを備え、予め設定された通常時に比べて、前記設定減速度が大きいときには、前記通常時に比べて前記車両に減速度が早く発生するように制御する(S107)。
(もっと読む)
物体進路予測方法、装置、およびプログラム
【課題】現実として起こりうる状況下においても安全性の確保を図ることができる物体進路予測方法、物体進路装置、および物体進路プログラムを提供する。
【解決手段】物体の位置および当該物体の速度を含む内部状態を記憶する記憶手段を備えたコンピュータが、前記物体の位置および内部状態を前記記憶手段から読み出し、この読み出した前記物体の位置および内部状態に基づいて、前記物体が時間の経過とともに取りうる位置の変化を時間および空間から構成される時空間上での軌跡として生成し、この生成した軌跡を用いることによって前記物体の進路の確率的な予測を行う。
(もっと読む)
死角支援情報報知装置及びプログラム
【課題】特定地域において自車両の死角に対する視認を支援するための死角支援情報を運転者に対して報知する死角支援情報報知装置において、自車両の前方に存在する車両等の障害物との関係に応じて、死角支援情報の報知の内容を変更することで、ドライバ・ディストラクションや煩わしさを低減するための技術を提供する。
【解決手段】自車両の走行に伴って通常のナビゲーション画面を表示する(S10)。ここで、自車両が支援エリアに進入したと判定した場合(S20:YES)、路上に設置された路側機及び自車両周辺の他車両から提供情報を受信し、死角支援情報の報知を行う。死角支援情報の報知中において、自車両と前方障害物との距離及び相対速度に基づいて所定の状況判定を行い、死角支援情報の報知の態様を変更すべき状況に該当すると判定した場合(S60:YES)、現在実行中の死角支援情報の報知の態様を変更する(S70)。
(もっと読む)
運転指導装置
【課題】 提示運転画像(プレゼンテーション画像)の効率的な編集が容易で、注意喚起箇所の運転指導が容易にできる運転指導装置を提供する。
【解決手段】 画面注意表示制御部13により、画面上における提示運転画像の運転状態が示された任意の注意喚起箇所42に注意表示43を付加させる制御を行うので、編集に際して運転状態が示された注意喚起箇所42に注意表示43を容易に付加できるとともに、運転者に対して当該注意喚起箇所42に付加された注意表示43により容易に運転指導できる。
(もっと読む)
車両追跡方法及び装置
【目的】種々の車両走行状態においても車両を追跡できる車両状態分類に基づく「車両追跡方法及び装置」を提供することである。
【構成】車両を追跡する車両追跡方法であり、一つのフレーム画像を取得するステップ、車両の以前のフレーム画像中の位置及び大きさの情報に基づいて、車両運動推定を行って車両が取得されたフレーム画像に存在可能な領域(車両存在可能領域)を決定するステップ、車両の状態分類を決定するステップ、該決定された車両の状態分類に応じた追跡方法により車両存在可能領域の画像データを処理して、取得されたフレーム画像中の車両の位置及び大きさを決定して出力するステップを有している。
(もっと読む)
車載装置調整装置
【課題】走行中であっても、運転者の意志に応じて車載装置の状態の連続的な調整が容易な車載装置調整装置を提供すること。
【解決手段】車載装置の状態を調整する車載装置調整装置1において、当該車載装置調整装置を起動する起動手段12と、運転者の顔向き角度を検出する顔向き検出手段14と、顔向き検出手段により検出された顔向き角度に応じて、車載装置17の状態を制御する車載装置制御手段15、18と、を有することを特徴とする。
(もっと読む)
道路情報取得装置、及びこれを利用した車両用走行制御装置、並びに道路交通システム
【課題】道路に関する情報を道路マーカから適切に検出することが可能な道路情報取得装置、及びこれを利用した車両用走行制御装置、並びに道路交通システムを提供すること。
【解決手段】車両に搭載される道路情報取得装置であって、道路長手方向に延在する、第1の道路マーカ列、及び第2の道路マーカ列を形成するように道路に敷設された道路マーカを検出する、道路マーカ検出手段20と、道路マーカ検出手段20により検出される、第1の道路マーカ列に属する道路マーカ5と、第2の道路マーカ列に属する道路マーカ7と、の位置関係に基づいて道路形状を検出する、道路形状検出手段と、を備えることを特徴とする。
(もっと読む)
障害物検知システム
【課題】複数のレーダ装置を備えた車両において電波干渉が生じた場合、送信周波数等を変更して電波干渉を回避しなくてはならない。本発明は、各レーダ装置の送信周波数等の情報を共有化することにより、送信周波数等の変更後に、再び他レーダ装置との電波干渉を引き起こさないようなレーダ装置を提供する。
【解決手段】近接した複数のレーダ装置が、通信を介してお互いの変調態様情報を共有することにより、外界からの電波干渉時でも共有相手に対する電波干渉が発生しないようにする。
(もっと読む)
2,001 - 2,020 / 2,931
[ Back to top ]