
Fターム[5H180LL04]の内容
Fターム[5H180LL04]に分類される特許
201 - 220 / 2,931
運転支援装置
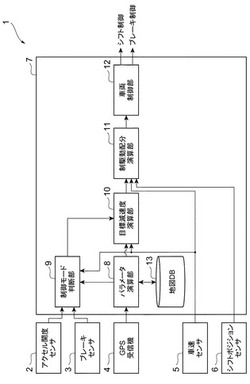
【課題】ドライバに与える違和感を軽減することができる運転支援装置を提供する。
【解決手段】 運転支援装置1のECU7は、自車両の現在位置と地図データベース13の情報とに基づいて、目標車速設定地点での自車両の目標車速等を演算するパラメータ演算部8と、車速センサ5により検出された車速及び目標車速等に基づいて、自車両の目標減速度を演算すると共に、その目標減速度から減速アシスト制御量の変更回数を決定する目標減速度演算部10と、目標減速度演算部10により求められた目標減速度及び車速センサ5により検出された車速に基づいて、シフト段数及びブレーキ制御量を演算する制駆動配分演算部11と、シフト段数及びブレーキ制御量に応じてシフト及びブレーキを制御する車両制御部12とを有している。目標減速度演算部10は、目標減速度が高いほど減速アシスト制御量の変更回数を少なくする。
(もっと読む)
車両制御装置

【課題】本発明は、ETCシステムの通信不良時に、車両のETCゲートとの接触を回避できる可能性を高めることを目的としている。
【解決手段】このため、レーダにより自車両前方に先行する車両あるいは前方障害物との距離を検出する距離検出手段と、少なくとも、距離検出手段により検出された先行する車両あるいは前方障害物との距離が設定距離より短い場合に、自動制御させる自動制御手段とを備えた車両走行制御装置と、道路に設置された自動料金収受装置と通信する自動料金収受装置用車載装置とを備えた車両制御装置において、車両が自動料金収受装置に接近し、自動料金収受装置用車載装置と自動料金収受装置との通信が不良であると判定された時には、自動制御手段により車両速度を減速する減速手段を備えている。
(もっと読む)
車両用運転支援装置
【課題】車線逸脱に対する警報をよりドライバのフィーリングに合致したタイミングで行うことができる車両用運転支援装置を提供する。
【解決手段】制御ユニット5は、自車両1前方で認識した白線に沿って警報判定用ラインを設定し、当該警報判定用ラインと自車両との相対的な位置関係に基づいて車線逸脱警報を行う場合において、左右の白線H1,H2に沿って設定した基準となる警報判定用ラインwl,wrに対する補正量Dl,Drを予め設定された条件に基づいてそれぞれ演算し、白線H1,H2の外側或いは内側に対して各警報判定用ラインwl,wrを補正量Dl,Drだけオフセットさせて最終的な警報判定用ラインWl,Wrを設定する。
(もっと読む)
物体検出装置
【課題】移動体の周囲の物体を精度よく検出することができる物体検出装置を提供する。
【解決手段】物体検出装置1は、複数の傾斜状態の間で姿勢が変化するよう変形可能な移動体Xに搭載されている。物体検出装置1は、移動体Xの前傾状態に応じて設置された前方監視センサ2と、移動体Xの後傾状態に応じて設置された前方監視センサ3と、前方監視センサ2,3の何れかを選択し、選択した前方監視センサによって障害物を検出するECU5と、を備えている。このとき、ECU5では、選択する前方監視センサが移動体Xの傾斜状態に応じて切り替えられる。よって、移動体の傾斜状態に応じて移動体の周囲の物体を検出することできる。
(もっと読む)
運転支援装置、及び運転支援方法
【課題】運転者が事態を把握しやすいように、リスクや制御状態を効果的に表示する。
【解決手段】車両走行のリスクを検出したときに車両走行を制御すると共に、車両走行のリスクとその制御状態の少なくとも一方を視覚情報として表示する。また、車両走行に対する運転者の主体度を算出し(ステップS2)、算出した主体度に応じて視覚情報の表示形態を変更する(ステップS3)。例えば、車線逸脱防止制御が作動するときには、走行車線からの逸脱を抑制している状態を、反逸脱方向の矢印で表示し、主体度Dに応じて矢印のサイズ(長さ・太さを含む)や色を変化させる。ここで、主体度Dが低レベルのときには、逸脱傾向が増加するリスクが高まっているので、矢印を例えば『赤色』に設定し、そのサイズを大きくする。
(もっと読む)
走行支援装置
【課題】ドライバーが装置自体の走行制御に過度に依存することを避け、自発的な操作を促すことが可能な走行支援装置を提供する。
【解決手段】自車両の周辺に存在する障害物を検出する前方監視レーザレーダ13と、前方監視レーザレーダ13が自車両の周辺に存在する障害物を検出したときに、自車両の車速Vを最高速度制限値Vmaxr以下にする速度制御を行うECU30とを備えた速度制御装置1aにおいて、ECU30は、前方監視レーザレーダ13が自車両の周辺に存在する障害物を検出した後に障害物を検出しなくなったときでも、自車両のドライバーが自車両を最高速度制限値Vmaxr以下する減速操作を自発的に行なうまでは速度制御を行ない、減速操作を自発的に行なったときに速度制御を解除する。これによりドライバーが装置自体の走行制御に過度に依存することを避け、自発的な操作を促す。
(もっと読む)
後方視認支援システム
【課題】右左折時などに運転者が後方視認を容易にでき、接近車両の有無を運転者に警告可能な支援装置を提供する。
【解決手段】フェンダ部71に撮像方向を変更可能なカメラ2を固定する。カメラ2は後方を撮像し、撮像方向をモータ22の回動によって変更可能に設ける。蛇角センサ3が蛇角データを検出し、検出した蛇角に見合った分だけモータ22を回動させ、カメラ2による撮像方向を、直進時の後方側へと移動させる。一方、蛇角データが所定値以上の場合には、比較判断手段43が、カメラ2の撮像した現在画像データと直前画像データとを入力して、現在画像データに直前画像データよりも大きく撮像された接近部分があるか否かを判断する。比較判断手段43が、接近部分が有り、且つ、所定値以上の蛇角操作があった場合には、警告信号を出力し、スピーカ6等によって運転者に警告を促す。
(もっと読む)
車両支援システム
【課題】道路において車両から離れた位置で同車両の接近を確実に警告できる低消費電力型の車両支援システムを提供する。
【解決手段】道路の近傍の第1の位置に設置され、複数の異なる指向性を持って車両の走行音を集音する集音器と、道路の近傍の第1の位置から道路の走行方向に沿って所定距離離れた第2の位置に設置される表示器と、集音器の集音結果に基づいて、車両の進行方向が第2の位置に近づく方向又は第2の位置から遠ざかる方向の何れであるのかを判定し、車両の進行方向が第2の位置に近づく方向である場合、表示器に車両の接近を警告表示させる制御装置と、を備えたことを特徴とする車両支援システムである。
(もっと読む)
信号処理装置、及びレーダ装置
【課題】 レーダ軸のずれを精度よく検出する。
【解決手段】
車両に搭載されるとともに静止物標に反射されたレーダ信号を受信するレーダ送受信機の信号処理装置は、前記静止物標における前記レーダ信号の反射点を前記受信したレーダ信号に基づき検出する物標検出手段と、前記車両に搭載された画像認識装置が前記静止物標の近傍に他の物標が存在しないことを前記静止物標を含む撮像画像に基づき検出したときに、前記反射点の分布方向と基準方向との差が基準値以上か否かを検出する軸ずれ検出手段とを有するので、軸ずれ検出に適した状況で軸ずれ検出を行い、適さない状況での軸ずれ検出を回避できる。よって、軸ずれを精度よく検出できる。
(もっと読む)
移動物体検出装置、及び移動物体検出方法
【課題】環境やシーンの変化に適応しつつ、移動物体と静止物体とを区別する。
【解決手段】画像内で、路面に相当する最下部の所定領域(a)に含まれる特徴点を、路面構造に属する基準特徴点として選出し(ステップS3)、選出した基準特徴点に基づいて自車両の基準姿勢変化量を算出する(ステップS4)。次に、基準特徴点を除いた特徴点の中から、任意の特徴点を比較特徴点として選出し(ステップS5)、選出した比較特徴点に基づいて自車両の比較姿勢変化量を算出する(ステップS6)。そして、基準姿勢変化量と比較姿勢変化量とを三次元座標にマッピングし、基準姿勢変化量の座標位置に対して比較姿勢変化量の座標位置が、所定距離r以上離れているか否かを判定することで、比較姿勢変化量の算出に用いた比較特徴点が移動物体に含まれるか否かを判定する(ステップS7)。
(もっと読む)
車載無線通信装置および車車間通信方法
【課題】速度差のある車両との間でも必要な通信を確保でき、かつ、通信量を軽減可能な車車間通信技術を提供する。
【解決手段】車車間通信システムを構成する各車両(車載無線通信装置)は、定期的に自車に関する車両情報を送信するものであり、この送信間隔が自車の車速に応じて設定される。送信間隔は自車の速度が低いほど長く設定される。ここで、自車両よりも速い他の車両から情報を受信した場合には、自車速度に応じて設定された送信タイミングにかかわらずに即座に応答を返すとともに、送信間隔を相手車両の速度に応じた値に設定する。追突事故が起きりうる状況など、相手車両が自車両にとって危険な場合に上記制御を行うことが好適である。また、上記処理を行う車両が自車両を含めて複数台存在する場合には、その台数に応じて上記処理を行う確率を決定することも好ましい。
(もっと読む)
運転支援装置及びプログラム
【課題】追い越し動作に関する評価を行う運転支援装置及びプログラムを提供する。
【解決手段】運転支援装置は、自車両の走行する第一の車線の前方を走行する他車両を検出し(S101:YES)、他車両が走行している道路を他車両が走行し続けると予測される場合(S102:YES)、当該他車両を対象車両として特定し(S103)、左側追い越し判定処理を行う(S104)。自車両2が、第一の車線よりも道路の中央寄りではない第二の車線に車線変更し、対象車両を追い抜き、所定時間内に対象車両の前方において第一の車線へ車線変更した場合、当該追い越し動作を危険動作と判定する(S106)。これにより、追い越し動作が適正でない場合には危険動作であると判定するので、追い越し動作を適切に評価することができる。
(もっと読む)
運転支援装置
【課題】矢灯器付きの信号機が設置された交差点において適切な運転支援を行うことができる運転支援装置を提供する。
【解決手段】運転支援装置は、自車両が矢灯器方向に進行すると判断されたときは、インフラ情報及び自車両の車速に基づいて、自車両が現車速を維持した場合に交差点を通過する時の信号機の状態を判断する。このとき、自車両が現車速を維持した場合に交差点を通過する時の信号機の状態が黄信号の点灯タイミングであると判断されたときは、自車両が黄信号の点灯中に交差点を通過できるように誘導する。自車両が現車速を維持した場合に交差点を通過する時の信号機の状態が矢灯器信号または赤信号の点灯タイミングであると判断されたときは、自車両が矢灯器信号の点灯中に交差点を通過できるように誘導する。
(もっと読む)
物体検出装置および物体検出方法
【課題】オプティカルフローの算出精度を高めることによって物体検出精度を向上させること。
【解決手段】画像分割部が、フレーム画像を、オプティカルフローの出現点を含む第1の領域と第1の領域以外の領域である第2の領域とに分割し、フレーム間隔決定部が、第1の領域におけるオプティカルフローを生成するために用いる1組のフレーム画像の間隔を示す第1のフレーム間隔と、第2の領域におけるオプティカルフローを生成するために用いる1組のフレーム画像の間隔を示す第2のフレーム間隔とを個別に決定するように物体検出装置を構成する。
(もっと読む)
車両用警報装置および車両の警報発生方法
【課題】他車両などの対象物に対して自車両の存在を、適切なタイミングで知らせることができる車両用警報装置を提供すること。
【解決手段】自車両の前方路面上に光線を照射する照射手段20と、前記光線の照射角を調節する照射角度調節手段10と、前記照射角度調節手段を制御して、前記光線の照射角を調節することで、自車両から見た前記前方路面上における前記光線の照射点を、前記前方路面上の所定範囲において、所定の周期で移動させる制御手段10と、を備えることを特徴とする車両用警報装置。
(もっと読む)
無線通信装置およびこれを用いた車車間通信システム
【課題】PIAAが用いられる受信方式と用いられない受信方式の何れかを、状況に応じて適切に採用することが可能となる無線通信装置を提供する。
【解決手段】特定の周波数帯を用いて送信された所望信号を無線受信する無線通信装置であって、該特定の周波数帯に隣接した周波数帯についての受信電力を検出する受信状況検出部と、該検出の結果に基づいて、前記無線受信の方式を、PIAAが用いられるPIAA受信方式と、PIAAが用いられない非PIAA受信方式と、の何れかに設定する受信方式設定部と、を備えた無線通信装置とする。
(もっと読む)
進路評価装置
【課題】他車両のドライバの操作を配慮した進路を走行することが可能となり、より安全な交通環境を実現することができる進路評価装置を提供する。
【解決手段】進路評価装置60は、自車両81の進路候補a1,a2を生成する進路候補生成部61と、他車両82の進路b1,b2,・・・,b9を予測する進路予測部62と、自車両81の進路候補a1,a2と他車両82の予測進路b1,b2,・・・,b9との干渉状態を複数の干渉形態に分類する分類部63と、分類部63において分類された干渉形態に基づいて自車両81の進路を評価する進路評価部64とを備えている。
(もっと読む)
障害物検出装置
【課題】車両が障害物上を通過する際の底擦りの判定を正確に行うとともに、車体の底面以外の部分が障害物に接触するか否かの判定が可能な障害物検出装置を提供する。
【解決手段】画像取得部1と、画像取得部1で取得した画像データに基づいて路面形状を計測する路面形状計測部2と、自車両の車両データおよび路面形状に基づいて、自車両が障害物を通過する際の車両姿勢を推定する姿勢推定部3と、姿勢推定部3からの推定姿勢の情報を受けて、底擦りの判定や、底面以外の車体部分が障害物に接触するか否かの判定を行う接触判定部4と、接触判定部4からの判定結果に基づいて、警告を表示する警告表示部5と、自車両の車両データを保存する自車両データ保持部6とを備えている。
(もっと読む)
ブレーキ制御装置
【課題】信号機と信号機の停止線との距離に対応して、より適切に補助的な制動力を自車両に付与することが可能なブレーキ制御装置を提供する。
【解決手段】信号機401と信号機401の停止線402との距離Dを取得する通信装置104と、自車両のドライバーのブレーキ操作による制動力に対して、補助的な制動力を付与するブレーキアクチュエータ131とを備えた運転支援装置100において、自車両が信号機401に接近するときに、ブレーキアクチュエータ131は、通信装置104が取得した信号機401と信号機401の停止線402との距離Dに基づいて、付与する補助的な制動力を変更するため、信号機401と信号機401の停止線402との距離Dに対応して、より適切な大きさの制動力を自車両に付与することが可能となる。
(もっと読む)
運転状態判断装置、及びプログラム
【課題】従来技術と比較して、より正確にドライバの運転状態を判断する。
【解決手段】第1の所定時間内において、ドライバの視界24内の所定の遠方領域20に、検出された視線が第2の所定時間以上停留した第1の回数を演算し(108)、第1の所定時間内において、遠方領域20よりドライバの手前側の近傍領域22に、検出された視線が第2の所定時間以上停留した第2の回数を演算し(112)、第1の回数及び第2の回数の一方を基準としたときの他方の値を示す相対値Eを演算し(114)、そして、相対値Eがドライバが運転に適した状態で移動体を運転した場合に求めた相対値E´を含む所定範囲内の値でない場合に、移動体のドライバの状態が運転に適した状態でないと判断する(116)。
(もっと読む)
201 - 220 / 2,931
[ Back to top ]