
Fターム[5H180LL04]の内容
Fターム[5H180LL04]に分類される特許
2,921 - 2,931 / 2,931
車載カメラの光軸ずれ検出装置
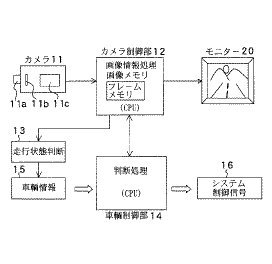
【課題】走行中の振動や周囲温度の変化などによって車載カメラの撮影光軸がずれた場合、そのずれ量を自動的に検出し、この検出に基づいて運転支援システムを動作させることができる車載カメラの光軸ずれ検出装置を提供すること。
【解決手段】フロントガラスなどに設けたマ−ク指標と、カメラ11の撮影画像からマ−ク指標の画像位置を選び、この画像位置情報をフレ−ムメモリに保存するカメラ制御部12と、フレ−ムメモリから読み出した基準となる画像位置情報と、新たに撮影されたマ−ク指標の画像位置情報を比較し、これら画像位置情報の差が所定の範囲内のときはフレ−ムメモリを新たな画像位置情報に更新し、所定の範囲外となるときは警告ブザ−などを起動させ、運転支援システム機能を停止させる車輌制御部14を備えた構成となっている。
(もっと読む)
車両制御装置、プログラム及び方法

【課題】運転者のブレーキタイミングの特性や車両を取り巻く状況に柔軟に対応することができる車両制御を提供する。
【解決手段】車両制御装置は、自車両の外部の画像を撮影する撮影手段と、他車両の接近を検出するためのテンプレートを記憶するテンプレート記憶手段を有する。テンプレートは、運転者のブレーキ操作に基づいて適宜更新される。車両制御装置は、撮影した画像とテンプレートとを比較して、前方を走行する車両が相当接近してきたために、自車両の減速や停止が必要であるか否かの判断を行う認識処理手段をさらに有している。認識処理手段によって減速や停止が必要と判断され、かつ、運転者によってアクセルペダルを戻したりブレーキペダルを踏むなどの衝突回避の操作が行われなかった場合は、動作指示手段によって自車両に衝突回避操作を実行させる。
(もっと読む)
障害物存在可能性検出装置及び障害物検出装置
【課題】 障害物の誤検出を防止すると共に障害物の検出タイミングを早めることができるようにすること。
【解決手段】 自車両の走行環境をナビゲーションシステム17で検出し、その検出結果に基づいて、自車両前方に障害物が存在する可能性の大きさを検出し、車間距離センサ12で先行車両を継続して検出できた時間が先行車検知時間以上であるときに当該先行車両を走行車線上の障害物であると判断し、さらに渋滞等で障害物が存在する可能性が大きいときには前記先行車検知時間を小さくすると共に、前記可能性が小さいときには前記先行車検知時間を大きくするようにした。
(もっと読む)
車外監視装置
【課題】レーザレーダによる測距値と画像による測距値との最適な統合を複雑な演算等することなく素早く行い前方の立体物データとして素早く出力する。
【解決手段】距離データ統合部5cはレーザ距離データと画像距離データの統合を次のように行う。レーザ距離データが有効な場合、レーザ距離データが遠方の場合は最終的な距離データはレーザ距離データとし、レーザ距離データが中間距離の場合、画像距離データが有効で且つ画像距離データとレーザ距離データとの差が所定値以内の場合は最終的な距離データはレーザ距離データと画像距離データとの平均値とし、上述以外の場合はレーザ距離データとする。レーザ距離データが近距離の場合は最終的な距離データは画像距離データとし、レーザ距離データが極近距離の場合は最終的な距離データはレーザ距離データとする。またレーザ距離データが無効な場合は最終的な距離データは画像距離データとする。
(もっと読む)
移動体用ナビゲーションシステム及び方法並びにコンピュータプログラム
【課題】 道路の混雑状態、道路の法律的又は地形的条件、ドライバーの生体状態、車の走行状態等から総合的に判断して、ドライバーに追い越し可能な旨の情報を提示する。
【解決手段】 移動体用ナビゲーションシステムは、移動体の走行を制御するACC等の走行制御手段と、移動体の現在位置を検出するGPS等の現在位置検出手段と、検出された現在位置に対応する所定の範囲内の地図情報を提示するナビゲーションマップ等の地図情報提示手段と、検出された現在位置の経路状況情報を提示する無線等の経路状況情報提示手段と、地図情報及び経路状況情報に基づき移動体操縦者に対して追い越し可能である旨を情報を提示するCPU、スピーカ、ディスプレイ等の操縦路提示手段を具備する。更に、ドライバーの生体状態を検出する脈拍センサ等の生体情報検出手段を備え、ドライバーの肉体的、精神的状態を判断して追い越し可能な旨の情報を提供する。
(もっと読む)
車載用通信装置及びその方法
【課題】 車を運転している運転者に電話をかけた場合において、運転者が応答できないときであっても、発信者がその後に何度も電話を繰り返してかけたりする事態を回避することができる車載用通信装置を提供する。
【解決手段】 車載用の通信装置300は、車の状態を検出する車載センサ311〜316と、電話装置100を通信可能に接続する通信インタフェース340と、通信インタフェース340を介して電話装置100を制御する制御装置380とを備え、制御装置380は、車載センサ311〜316が検出した着信時の車の状態を取得し、電話装置100への着信検出時に取得した車の状態に基づいて運転者が着信に応答することが危険か否か判断し、危険と判断した場合にその時点での車の運行状況に依存する情報である車情報を含めた応答メッセージを作成し、相手側装置に送信する。
(もっと読む)
交通制御システム
【課題】 交差点内での車両間の衝突事故を防止することのできる、交通制御システムを提供する。
【解決手段】 交差点における車両間の衝突を防止するための交通制御システムであって、交差点の信号機3に測距装置4を設置し、交差点に進入する車両2に被測距装置5を搭載し、信号機3に設置した測距装置4が、交差点に接近した自車以外の車両2と信号機3との距離を測定し、交差点に自車以外の車両2が所定距離まで接近した場合、自車1に警告を発するものである。
(もっと読む)
車両用衝突防止装置
【課題】交差点等に進入するとき、交差する道路の交差点から奥まった位置までその状況を自車両から事前検出し、この検出結果に応じて衝突回避のための適切な措置を自車両側で自動的に講じる。
【解決手段】車両用衝突防止装置は、自車両に搭載され、他の移動体との衝突を回避するための措置を自車両側で採るようにした装置である。本装置は、広角の視野の画像を撮る広角カメラ12A,12Bと、これにより撮像された画像から移動中の移動体を抽出する手段23と、自車両が現状のまま走行を継続したときに移動体と衝突する恐れがあるか否かを判断する手段22と、衝突の恐れがあると判断されたときに衝突回避の措置を自動的に採る手段22,15〜17とを備える。
(もっと読む)
メンテナンス表示システム
【課 題】 常時はみぢかに保守点検の難しい設備機器類等のメンテナンスを、該設備機器類等の設置場所で即座に作動状態をチェック可能にすることにより、多大の労力と時間を費やすことなく、簡単に検知できるシステムとする。
【解決手段】トランジスタ(13など)又は電界効果トランジスタ(FET)のスイッチング作用によるメンテナンスチェック回路を、設備機器類に内蔵あるいは別体として構成し、発光表示手段(1など)によって各制御回路の作動状態の確認がなされ、更にマイコンによるデータ判別とその解析がなされ設備機器類のシステム全体のメンテナンス管理を行う。
(もっと読む)
先行車追従装置
【課題】 先行車追従制御を解除したときに無用な接近警報が発せられるのを防止する。
【解決手段】 先行車追従制御の解除操作がなされても、所定の追従制御終了条件を満たすまで先行車追従制御を継続する。
(もっと読む)
自動車の走行制御装置
【課題】自車が先行車に追従して第1目標車速付近で走行するときに車体の前後方向の加減速を頻繁に受けず、乗り心地を向上できる。
【解決手段】定速走行用車速設定部27により設定される自車の第1目標車速と車間距離用車速設定部28により設定される自車の第2目標車速とを比較して低い方の車速が自車の最終目標車速とするように制御される。第1目標車速V1から減速して所定の目標車間距離になるように自車の最終目標車速を第2目標車速に切換えるときに、V1からV1−αまでの範囲では、現時の自車の最終目標車速を切換えないように制御される。また第2目標車速から加速して上記第1目標車速になるように自車の最終目標車速を切換えるときに、V1からV1+αまでの範囲では、現時の自車の最終目標車速を切換えないように制御される。
(もっと読む)
2,921 - 2,931 / 2,931
[ Back to top ]