
Fターム[5H180LL04]の内容
Fターム[5H180LL04]に分類される特許
81 - 100 / 2,931
運転支援システム
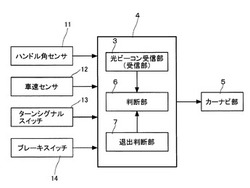
【課題】運転支援の必要がない状況になった際に速やかに運転支援を終了させる。
【解決手段】ハンドル角センサ11、車速センサ12、ターンシグナルスイッチ13、ブレーキスイッチ14の情報により、運転者の意思に基づいて自車両が支援システムの当該路から外れたことを退出判断部7で認識した時に、判断部6によりカーナビ部5への表示を停止させる。
(もっと読む)
車載安全制御装置及び安全運転支援システム

【課題】センサの検出範囲が衝突事故発生予測位置を含んでいない場合においても、精度の高い衝突危険性度合で警告可能な車載安全制御装置及び安全運転支援システムを得る。
【解決手段】TTC演算モデル判定部14Aは、路側移動体検出装置2が検出した移動体6(対象移動体)で、かつ、所定時間Th経過後に検出範囲Ld外に移動するものと判定される移動体(仮想移動体)が存在する場合、当該対象移動体の進行方向に設置されている信号機の灯色が赤から青に変化する時点において、当該対象移動体の速度が基準速度Va以下である場合に、加速モデルとして判定し、基準速度Vaを上回る場合は等速モデルとして移動モデルを判定する。TTC演算処理部15Aは上記移動モデルに用いて、対象移動体が衝突事故発生予測位置P点に到達する到達予測時間Tpを演算する。
(もっと読む)
方向転換支援装置及び方法
【課題】車両の方向転換が可能か否かを運転者が精度良く判断可能なように支援する技術を提供する。
【解決手段】自車両の周囲を撮影した画像を取得し、前記画像を変換して俯瞰画像を生成し、自車両が最小回転半径で走行した場合の最小軌道を求め、自車の舵角を検出した舵角情報を取得し、前記舵角情報が示す舵角で自車が走行した場合の予想軌道を求め、前記最小軌道と前記予想軌道を前記俯瞰画像情報と重畳して表示装置に表示させる。
(もっと読む)
障害物認識装置
【課題】撮影画像に含まれた障害物側面の端をエッジヒストグラムを用いずに正確に認識できる技術を提供する。
【解決手段】自車両1に搭載され、自車両1周辺を撮影する単眼カメラ3により撮影された撮影画像が、路面に垂直な仮想面に射影した側面視の画像に変換手段6aにより変換されて、側面視の画像に含まれた障害物側面の端が検出手段6bにより検出されるため、撮影画像に含まれた障害物側面の端を水平エッジヒストグラムを用いずに正確に検出することができる。
(もっと読む)
運転支援システム
【課題】地図情報を有する車両が運転支援の判断を行い、地図情報を有しない車両へ判断した結果を送信することにより、地図情報を有しない車両でも判断結果により運転支援を行う。
【解決手段】自車両位置情報取得手段と、車車間通信手段とを備えた複数の車両が自車両の位置を含む車両情報を送受信しあう運転支援システムにおいて、地図情報を記憶する地図情報記憶手段を備える車両は、自車両が進行する方向に存在する他車両と自車両とが衝突する可能性があるか否かを判定し、衝突する可能性があると判定された時には、他車両と自車両とが衝突するまでの時間である衝突予測時間を算出する衝突可能性判定手段を備え、前記衝突可能性判定手段により判定された結果を前記衝突する可能性があると判定された車両へ前記車車間通信手段により送信する。
(もっと読む)
衝突回避支援装置、および衝突回避支援プログラム
【課題】自車両が車線変更する際に他車両と衝突しないように支援を行う衝突回避支援装置において、車線変更時の運転者の負担をより軽減できるようにする。
【解決手段】衝突回避支援システムにおいては、自車両が現在の速度のまま車線変更する際に必要となる等速変更領域として設定するとともに、自車両が加速してから車線変更する際に必要となる加速変更領域、および自車両が減速してから車線変更する際に必要となる減速変更領域を設定する(S210)。そして、各変更領域設定手段が設定した各領域のうち、他車両が存在しない領域を抽出する(S230)。さらに、他車両が存在しない領域が存在しない場合、車線変更すると危険であると判断し、等速変更領域に他車両が存在しない場合、現在の速度のまま車線変更可能と判断し、加速変更領域または減速変更領域に他車両が存在しない場合、加速または減速すれば車線変更可能と判断する(S150)。
(もっと読む)
衝突予測装置
【課題】従来に比して衝突の誤判定を低減した衝突予測装置を提供する。
【解決手段】自車両に搭載され、当該自車両と他車両との衝突を予測する衝突予測装置であって、自車両の周囲に電磁波を送信し、他車両から反射された当該電磁波の反射波を受信することによって当該他車両の走行情報を検出する他車両情報検出手段と、他車両の走行情報が検出された場合、自車両と他車両との衝突の危険性が高いか否かを当該走行情報に応じて判定する衝突判定手段と、自車両周辺が渋滞しているか否かを判定する渋滞状況判別手段と、渋滞状況判別手段の判定結果に応じて衝突判定手段の判定感度を低減する感度変更手段とを備える、衝突予測装置である。
(もっと読む)
運転状態判定装置
【課題】本発明は、運転者の足裏位置に基づいて運転者がブレーキペダルの操作を開始するまでにかかる時間を推定することで、運転者の危機対応状態を判定することができる運転状態判定装置を提供する。
【解決手段】本発明に係る運転状態判定装置1は、運転者の足裏位置を検出する足裏位置検出センサ7と、足裏位置検出手段の検出した足裏位置に基づいて、運転者がブレーキペダルの操作を開始するまでにかかる時間を推定する推定し、その推定結果に基づいて、運転者の運転状態を判定するECU2と、を備える。この運転状態判定装置1によれば、運転者の足裏位置から運転者がブレーキペダルの操作を開始するまでにかかる時間を推定することで、障害物接近等の危機に対して運転者がすぐに対応できる状態であるか否か、すなわち運転者の危機対応状態を判定することができる。
(もっと読む)
事故発生予測装置、事故発生予測プログラム及び事故発生予測方法
【課題】道路形状に依らない他車の動きに起因する事故の発生を予測する。
【解決手段】自車と他車の間で事故が発生する可能性のある状態を、自車と他車の相対位置の情報、自車及び前記他車の移動ベクトルの情報、及び他車の移動ベクトルを変動させる要因の情報で定義した事故定義を保持する予測状況DB18と、自車が実際に運転されている状態で、自車と他車の相対位置の情報、自車及び他車の移動ベクトルの情報、及び他車の移動ベクトルを変動させる要因の情報を取得する取得部(10A,10B,11,14)と、取得部で取得された情報と、事故定義とを比較して、事故が発生する可能性があるか否かを判定する判定部16と、を備える。
(もっと読む)
情報提示装置
【課題】精度がより高く、且つ、実施がより容易であるとともに、コスト的な無駄をより抑えることを可能にしながらも、ドライバにとっての快適性をより損ないにくい情報提示装置を提供する。
【解決手段】注意喚起表示や警告表示にドライバが気づいたか否かの判定を行う行動判定部30を備え、情報提示制御部27は、行動判定部30で肯定判定を行ったことをもとに、注意喚起表示や警告表示の減衰表示への変化を表示部21に行わせ、行動判定部30は、表示部21に表示された注意喚起表示や警告表示にドライバが気づいた場合にドライバが行うスイッチ操作や運転操作によって生じる信号であるドライバ行動確認情報や車両情報をもとに上述の判定を行う。
(もっと読む)
運転支援装置
【課題】本発明は、運転者の煩わしさの低減を図ることができる運転支援装置を提供する。
【解決手段】本発明は、車両の運転者に対して車両周辺の障害物を回避するための運転支援を行う運転支援装置1であって、障害物を検出する障害物レーダ4と、運転者の運転操作を検出する運転操作検出部5と、障害物レーダ4の検出した障害物の車両に対するリスク度を算出するリスクマップ作成部13と、障害物レーダ4及び運転操作検出部5の検出結果に基づいて、運転者が障害物に対するリスク回避操作を行ったか否かを判定すると共に、リスク度の高さに応じて運転支援の内容を変更する支援判断部16と、を備え、支援判断部16は、運転者はリスク回避操作を行ったと判定した場合、当該障害物のリスク度が当該判定時点より高い段階における運転支援の内容を支援度の低い内容に変更することを特徴とする。
(もっと読む)
物体検出装置および運転支援システム
【課題】周囲に存在する物体の部分のうち最も近接する位置にある部分までの距離の情報を的確に検出することが可能な物体検出装置を提供する。
【解決手段】物体検出装置1は、代表距離算出手段12が算出した各代表距離znをグルーピングして物体を検出する物体検出手段13を備え、物体検出手段13は、検出した物体の手前側に探索領域Rを設定し、探索領域R内での個々の距離zの情報の分布に基づいて、探索領域R内に物体の一部Bが存在すると判断した場合には、元の当該物体までの距離の情報Zと検出した当該物体の一部までの距離の情報Zbとの差分ΔZを算出して当該物体の情報に対応付け、当該物体の情報に差分ΔZが対応付けられている場合には、検出した当該物体までの距離Zから差分ΔZを差し引いた値を新たに当該物体までの距離Znewの情報として算出して出力する。
(もっと読む)
車両表示装置および表示方法
【課題】 後方画像に死角が生じていることを知らせることができる「車両表示装置および車両表示方法」を提供する。
【解決手段】 本発明の車両表示装置は、車両後方を撮像しその後方画像を表示するものであって、車両の後方を撮像する撮像カメラ110と、撮像カメラからの撮像データに基づき後方画像をディスプレイ140に表示可能な出力制御部130と、撮像データに基づき自車が斜め駐車されたか否かを判定する駐車方向判定部132と、斜め駐車と判定されたとき後方画像において死角が生じる方向を判定する死角方向判定部134とを有する。出力制御部130は、斜め駐車と判定されたとき、死角方向判定部の判定結果に基づき死角が生じることおよび死角の方向を知らせる表記210、220を、後方画像200上に合成して表示させる。
(もっと読む)
衝突予測装置
【課題】衝突予測装置において、車両の障害物と衝突する可能性のある領域が異なる場合でも、衝突予測の信頼性を容易に維持させる技術を提供する。
【解決手段】自車両における車体幅を区分けした複数の区画に対して、自車両と障害物との関係から算出される衝突予測位置及び信頼度を当てはめ、複数の区画のうちから障害物が衝突すると予測される衝突予測区画を判定するものであって、区画Xn(nは整数)は、自車両における車体幅にかかわらず障害物検出センサの検出精度によって決定された一定幅に設定されており、複数の区画X1〜X5は、自車両における車体幅に対して、区画Xnが1列に隙間無く並ぶ状態(図2(a))か、又は、区画Xnが重なった部分を有しつつ区画Xnが隙間無く並ぶ状態(図2(b))のどちらかの状態に設定されている。
(もっと読む)
運転支援装置
【課題】 交通の流れをスムースにできる運転支援装置を提供する。
【解決手段】 運転支援装置1は、自車の走行する道路上に存在する信号機付き交差点の信号機情報を取得する信号機情報取得手段41と、自車の前方において、自車の走行する道路に進入しようとする他車を検出する他車検出手段51と、他車の走行道路への進入位置から信号機付き交差点までの距離を検出する第一距離検出手段21と、信号機情報と進入位置から信号機付き交差点までの距離とに基づいて、自車が進入位置に到達した際に自車の進入位置の通過に先駆けて他車を走行道路に進入させるか否かを判断する判断手段24と、を備える。従って、他車は、走行道路を走行する各車両が停止する際に適切な車間距離まで詰めるのを待たされることなく、適切なタイミングで走行道路に進入可能となるため、交通の流れをスムーズにできる。
(もっと読む)
運転支援装置
【課題】衝突可能性がある他車両の接近に対して注意喚起を行なう運転支援装置において、ドライバに最適なタイミングで注意喚起が行なえるようにする。
【解決手段】検出部14により、衝突可能性があって自車両1に接近する他車両21、23のヒヤリハットの発生を検出し、この検出に基づき、衝突可能性があって自車両1に接近する他車両21、23のヒヤリハットの発生状況から学習し、実際に注意喚起のタイミングの補正が必要なときにのみ、注意喚起処理部8により、記憶部9の注意喚起のタイミングを自動的に的確に自車両1のドライバの運転行動の特性に応じた最適なタイミング補正し、次回の注意喚起のタイミングに、記憶部9の補正されたタイミングで表示部10、スピーカ11によって注意喚起を行なう。
(もっと読む)
幹線路合流情報提供システム
【課題】合流地点近くの側路にいる車両が適切かつ円滑に幹線路の流れに合流することが可能な、合流情報提供システムを提供すること。
【解決手段】本発明の幹線路合流情報提供システムは、側路と合流する幹線路上に設けられた2つのカメラにより合流地点へ向かう走行物体の時系列画像を取得し、この時系列画像上で垂直位置と前記監視領域の平面上での視差との関係を表す視差プロファイルを計算する。この視差プロファイルに基づいて、カメラから得られる画像に複数の処理領域を設定し、設定された複数の処理領域から検出された走行物体の大きさの変化、複数の処理領域の間隔から走行物体の速度を算出する。
算出された走行物体の速度から幹線路の状態情報を検知し、側路上に車両に対して表示する。
(もっと読む)
経路作成装置
【課題】走行経路の作成時間を短縮すること。
【解決手段】経路作成装置1は、ノードを繋ぐ線分を順次接続することにより開始点から目標点までの車両の走行経路を作成する装置である。この経路作成装置1は、空間上からランダムに抽出した点を基準に新たなノードを設定する処理を、目標点から所定の範囲内にノードが設定されるまで繰り返し実行し、設定されたノードを繋ぐ線分を順次接続することにより走行経路を作成する作成部16bと、車両の状況又は該車両の周辺の状況を検出する手段(障害物検出装置11や白線検出装置12など)と、検出された状況に基づいて、目標点をランダムに抽出した点とする確率を決定する確率決定部16aと、を備えることを特徴とする。
(もっと読む)
ナビゲーション装置及びレーン変更案内方法
【課題】レーン変更先の走行レーンにおける車両走行速度と自車両の走行速度との差が大きい場合であっても、運転者が安全にレーン変更を行うことが可能な「ナビゲーション装置およびレーン変更案内方法」を提供する。
【解決手段】経路案内すべき交差点から自車位置までの間に複数のレーンがある道路が含まれている場合であって、かつ、複数の走行レーンのうち互いに隣り合う各組の隣接走行レーンの中に車両走行速度の差分が所定値以上となる隣接走行レーンが存在する場合、通常のタイミングよりも経路案内のタイミングを早くするように制御することにより、レーン変更先の走行レーンにおける車両走行速度に自車両の走行速度を合わせるための距離を長く確保できるようにする。
(もっと読む)
通信端末装置
【課題】本発明は、パケット通信に利用可能な空きスロットが無い場合でもパケット通信に利用するスロットを決定することを目的とする。
【解決手段】本発明は、自車両Aに搭載された通信端末装置1の車車間通信情報処理部11が、パケット通信に利用できるFREEスロットが無いと判定した場合、GPSアンテナ2aが取得した位置情報、受信状態信号解析部8がして得られた周囲の車両の位置情報に基づいて、自車両Aの後方にある車両Dと車両Eのスロットの利用状況を重み付けしてパケット通信に利用するスロットを決定することを特徴とする。
(もっと読む)
81 - 100 / 2,931
[ Back to top ]