
Fターム[5H180LL04]の内容
Fターム[5H180LL04]に分類される特許
141 - 160 / 2,931
自動制動装置
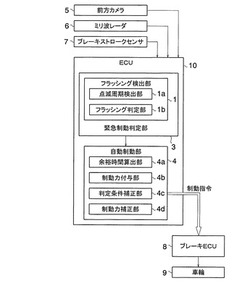
【課題】自動制動装置に関し、簡素な構成で、先行車両の急制動時に適切に自動制動制御を実施する。
【解決手段】先行車両の灯火装置の画像を撮影する撮像手段5と、撮像手段5で撮影された該画像に基づき、該先行車両における緊急制動操作の有無を判定する緊急制動判定手段3と、緊急制動判定手段3において該緊急制動操作であると判定された場合に、自車両の自動制動を実施する自動制動手段4とを備える。
該緊急制動判定手段3において、該灯火装置の点滅周期を検出する点滅周期検出手段1aと、点滅周期検出手段1aで検出された該点滅周期に基づき、該灯火装置におけるフラッシングの有無を判定するフラッシング判定手段1bとをさらに設ける。
(もっと読む)
識別器生成方法、コンピュータプログラム、識別器生成装置及び所定物体検出装置

【課題】撮像画像から車輌などの所定物体を高精度に識別できる識別器を低コストで生成することができる識別器生成方法、コンピュータプログラム、識別器生成装置及び所定物体検出装置を提供する。
【解決手段】識別器生成装置5は、第1条件で撮像した画像群から画像を取得して特徴量を抽出し、抽出した特徴量を基に第2条件での識別を行うべく識別器の更新を行うことによって、第2条件で撮像した画像を用いることなく、第2条件用の識別器を生成する。又は、識別器生成装置5は、第1条件で撮像した画像群を用いて生成された識別器を基に、第2条件で撮像した画像群から画像を取得して特徴量を抽出し、抽出した特徴量を基に識別器の更新を行うことによって、少ない第2条件での撮像画像を用いて、第2条件用の識別器を生成する。
(もっと読む)
視覚障害者用移動体接近報知方法および視覚障害者用移動体接近報知装置
【課題】視覚障害者がハイブリッド自動車、電気自動車等の走行音の小さな移動体の接近を、移動体の走行音が小さな利点を喪失させることなく、確認・判断出来る方法・装置を提供することにより、視覚障害者が移動体に対する身構えと危険回避行動を取れる様にして視覚障害者が被害者として人身事故等に遭遇する危険性を低減することにある。
【解決手段】自動車や電車等の移動体に指向性のある電波であるマイクロ波を走行方向の前方に発射出来るマイクロ波発射装置を装着させると共に、前記移動体が発射するマイクロ波を受信・検知出来る電波受信・検知手段と該電波受信・検知手段での電波受信・検知に連動して移動体の接近と接近方向を音声で知らせることの出来る音声伝達手段とを少なくとも具有した移動体接近報知装置を視覚障害者が上体部に着装することにより、視覚障害者が走行音が小さな移動体の接近を確認・判断出来る様にする方法・装置を提供する。
(もっと読む)
車両用白線認識装置
【課題】エッジ検出等の演算処理を複雑化させることなく、多重白線等に対しても安定した認識結果を得ることができる車両用白線認識装置を提供する。
【解決手段】ステレオ画像認識装置4は、画像上の左右の各白線検出領域内において、水平方向に設定した複数の検索ラインL上での輝度変化に基づいて検索ラインL毎に各1組の白線開始点Ps及び白線終了点Peを検出すると共に、これら各対をなす白線開始点Psと白線終了点Peとの中間点を算出し、白線開始点Psからなる点群と中間点Pmからなる点群とのうち、予め設定された条件に基づいて判定されるばらつきが最も小さい点群を白線演算対象の点群として選定して当該選定した点群に基づいて白線を演算する。
(もっと読む)
画像処理装置
【課題】撮影画像の消失点(FOE)を少ない計算負担で迅速に検出できるようにする。
【解決手段】領域決定手段34により車両1の撮像装置2が撮影した車両周囲の撮影画像から消失点(FOE)が存在する可能性がある候補領域を決定し、フロー算出手段35により撮影画像の算出対象領域のオプティカルフローを算出する。個別類似性演算手段36により候補領域の消失点候補画素毎に各算出対象領域と消失点候補画素とを結ぶ線分の向きと各算出対象領域のオプティカルフローの向きとのペアについての類似性の度合いの指標値を演算し、総合類似性演算手段37により各指標値に基づいて消失点候補画素それぞれの類似性の度合いの総合値を演算する。このとき、演算中の総合値が演算の終了した他の消失点候補画素の総合値より消失点である確度が低い値に確定すると、演算制御手段39によりその消失点候補画素の演算を終了し、消失点決定手段38により、少ない計算負荷で絞り込んだ確度の高い候補領域から消失点(FOE)を決定する。
(もっと読む)
周辺車両情報提供装置
【課題】地図中の他車の位置を特定するマップマッチングの演算負荷を低減することが可能な周辺車両情報提供装置を提供する。
【解決手段】周辺車両情報提供装置(12)は、マップマッチング(MM)処理後の第2自車位置(P12)とMM処理前の第1他車位置(P21)とに基づいて、第1他車位置(P21)に対する位置特定マップマッチング処理の要否を判定するマップマッチング要否判定手段(60)を備える。また、周辺車両情報提供装置(12)の他車マップマッチング処理手段(64)は、前記位置特定マップマッチング処理が必要であるとマップマッチング要否判定手段(60)が判定した第1他車位置(P21)に対して前記位置特定マップマッチング処理を行う。
(もっと読む)
運転支援装置、運転支援方法、及び運転支援プログラム
【課題】車両に対する不適切な操作を誘発することなく信号情報に基づく案内を行うことができる、運転支援装置、運転支援方法、及び運転支援プログラムを提供すること。
【解決手段】運転支援装置60は、信号機の現示に関する信号情報を取得する信号情報取得部61aと、信号情報取得部61aが取得した信号情報に基づく案内を行う案内部61bと、案内部61bが案内を行ってから信号機を通過するまでになされた車両2に対する操作を判断する操作判断部61cとを備え、案内部61bは、操作判断部61cが判断した車両2に対する操作に基づいて、信号機を通過した後に新たに前記信号情報取得手段が取得した信号情報に基づく案内を行うか否かを決定する。
(もっと読む)
車両用白線認識装置
【課題】簡単な演算処理により、二重白線等に対しても高精度で安定した白線認識を行うことができる車両用白線認識装置を提供する。
【解決手段】ステレオ画像認識装置4は、画像上に設定された第1の白線検出領域A1内の検索ラインLx上での輝度変化に基づいて第1の白線開始点Pjを検出し、第1の白線開始点Pjからなる点群の近似線apを演算する。近似線apの車幅方向内側に白線探索線Lyを設定し、白線探索線Ly上の輝度情報に基づいて近似線apの車幅方向内側で白線を探索し、白線が存在するとき、車幅方向内側の領域を拡張した第2の白線検出領域A2を設定し、第1の白線開始点Pjと重複しない第2の白線エッジ点を検出し、設定条件に基づいて選定した第1の白線開始点Pj或いは第2の白線開始点PKからなる点群に基づいて白線を演算し、演算した白線に基づいて第1の白線検索領域A1を設定する。
(もっと読む)
支援装置、それにおける安全走行の支援をコンピュータに実行させるためのプログラムおよびそのプログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】車両が起こし得る事故の種類に応じて危険車両を特定することができる支援装置を提供する。
【解決手段】車両CA1に搭載された支援装置10は、地図情報と、車両CA1の位置と、車両CA1の進行方向と、車両CA1のウィンカー信号とに基づいて、車両CA1の進行方向における直近の交差点CROSSにおける車両CA1の進行方向を判定して車両CA1が起こし得る事故の種類を判定する。そして、車両CA1に搭載された支援装置10は、車両CA2〜CA4の位置、速度および進行方向と、車両CA1の位置とに基づいて、車両CA1が起こし得る事故の種類に応じて、車両CA2〜CA4をそれぞれ出会い頭事故、右折事故および左折事故における危険車両として特定するとともに、その特定した危険車両を車両CA1の運転者に警告する。
(もっと読む)
画像処理装置
【課題】計算負荷を軽くして精度よく消失点(FOE)が存在する分割領域を決定し、消失点(FOE)を少ない計算負担で迅速に検出できるようにする。
【解決手段】車両1に搭載された撮像装置2が撮影した車両周囲の撮影画像を画面分割手段31により複数の分割領域に分割し、フロー算出手段35により各分割領域のオプティカルフローを算出し、延長手段33により各分割領域のオプティカルフローを延長した延長線を求め、領域決定手段34により撮影画像の所定数以上の延長線が通る分割領域を撮影画像の消失点(FOE)が存在する可能性がある候補領域に決定し、撮影画像の道路に平行な線分の延長線の交点を求めるような複雑な演算をすることなく、少ない計算負荷で絞り込んだ確度の高い候補領域から消失点(FOE)が求められるようにする。
(もっと読む)
車両用監視装置
【課題】光電変換手段において提案されている特性の車両用監視装置への好適な活用。
【解決手段】可視光域において60%以上の量子効率を有するとともにソーラーブラインド赤外光域においても有効な量子効率を有している複数の受光部が規則的に配列された光電変換部から車両重心の可視光画像または太陽光による赤外光画像を取得するとともに、同じ光電変換部からソーラーブラインド赤外光スキャンビームの車両重心からの反射光像を取得し、画像中の反射位置とスキャンビーム角度から車両までの距離を算出する。スキャンビーム投射タイミングに基づき反射光を分離する。赤領域とソーラーブラインド領域の受光部を兼用する。昼間と夜間等で、赤領域より長波長側でかつソーラーブラインド領域よりも短波長側をカットする帯域カットフィルタと可視光領域をカットするローパスフィルタを切換える。
(もっと読む)
走行制御装置
【課題】レーダ装置の発熱および劣化が生じることを的確に抑制する。
【解決手段】走行制御装置10は、先行車両に対する追従走行と渋滞追従走行とを制御する制御ステート決定部34と、追従走行の実行時に自車両の進行方向に向けて発信する電磁波の出力を増大させる出力増大モードを実行し、かつ出力増大モードよりも電磁波の出力を低減させる出力低減モードを所定時間間隔毎に一時的に出力増大モードから切り替えて実行し、渋滞追従走行の実行時には、出力低減モードを実行する発信部11aと、追従走行の実行時に、出力増大モードの反射波の反射レベルと出力低減モードの反射波の反射レベルとの比較結果に基づき、出力増大モードと出力低減モードとの切り替えの異常の有無を判定する切替異常判定部36とを備え、制御ステート決定部34は、切替異常判定部36の判定結果において異常が有る場合に渋滞追従動作の実行を禁止する。
(もっと読む)
情報提示装置及び情報提示システム並びにプログラム
【課題】障害物等が存在する方向や移動方向などの方向に関する情報を、運転者等に正確に提示することができる触覚刺激による情報提示装置等を提供すること。
【解決手段】ステップ110にて、周辺監視装置3からの信号に基づいて、危険物の状態を分析し、どの振動モータ23をどのように駆動させるかを決定する。例えば車両の前方の右側に危険物が存在する場合に、シート20の左側から右側に向かって振動が移動するように制御するときには、振動モータ23の振動を順次右側に移動させるとともに、始点側のみ振動させる振動モータ23の列を2列とし、その後は1列のみ振動させるように、駆動信号を設定する。これにより、(始点のある)左側から(終点のある)右側に向かって、始点側を強調した振動が移動するように各振動モータ23の動作が繰り返されるので、運転席に着座した運転者は、振動が左側から右側に移動することを体感できる。
(もっと読む)
車両用接触回避支援装置
【課題】走行路の路面摩擦特性を精度良く判定することが可能な車両用接触回避支援装置を提供する。
【解決手段】車両用接触回避支援装置14の路面摩擦特性判定手段20は、路面摩擦係数μが推定される毎に、路面摩擦係数μに対応する路面摩擦特性のカウント値CNT_sl、CNT_l、CNT_hを積算し、当該積算の結果に応じて前記路面摩擦特性を判定する。
(もっと読む)
物体検出装置及び運転支援装置
【課題】警報対象とはならない物体に対して警報が行なわれることを抑制する。
【解決手段】レーダで自車両の後側方の車両を検出する物体検出装置において、自車両の進行方向に複数の車線を有する道路を走行するときに、自車両が走行している車線を取得する取得手段と、レーダにより検出される物標を車両として認識するときの条件を、取得手段により取得される車線に基づいて変更する認識条件変更手段と、を備える。
(もっと読む)
車両周辺監視装置および車両周辺監視方法
【課題】静止立体物と移動体とを区別して検出する。
【解決手段】車両周辺監視装置は、車両に取り付けられた撮像カメラと、撮像カメラからの撮像データを画像処理し特徴点を抽出する画像処理部210と、特徴点についての物体の判定を行う物体判定部220とを有する。画像処理部210は、撮像データの特徴点の動きベクトルを検出する第1の検出手段と、俯瞰画像に変換された特徴情報の動きベクトルを検出する第2の検出手段とを含む。物体判定部220は、第1の検出手段および第2の検出手段によって特徴点の動きベクトルが検出されたとき、当該特徴点を移動体と判定し、第1の検出手段によって特徴点の動きベクトルが検出されずかつ第2の検出手段によって特徴点の動きベクトルが検出されたとき、当該特徴点を静止立体物と判定し、第1の検出手段および第2の検出手段によって特徴点の動きベクトルが検出されないとき、当該特徴点を背景と判定する。
(もっと読む)
半自律型無人車両の遠隔操縦システム
【課題】操縦者の意図した通りの高速走行を、安全に行うことができるようにする。
【解決手段】測距データに基づいて走行可能エリアを抽出するエリア抽出手段10aと、走行状態を取得する走行状態取得手段10bと、走行状態と走行可能エリアとに基づき、操縦限界を示す操縦限界情報を生成する操縦限界情報生成手段10cと、操縦限界情報を遠隔操縦装置に向けて送信する操縦限界情報送信手段10dと、操縦限界情報に基づき制限され、かつ、遠隔操縦装置から送出された操縦情報に従い、半自律型無人車両を走行させる自律走行手段10eとを半自律型無人車両に設けたこと、操縦限界情報を表示部に表示させる操縦限界情報表示手段と、操縦限界情報に基づき制限された操縦情報を生成する操縦情報生成手段と、電気通信回線を通じ、生成した操縦情報を半自律型無人車両に向けて送信する操縦情報送信手段とを遠隔操縦装置に設けている。
(もっと読む)
運転支援装置、運転支援方法、及び運転支援プログラム
【課題】車両が逆走するおそれが有る場合に逆走を禁止する旨の案内を行うことができる、運転支援装置、運転支援方法、及び運転支援プログラムを提供すること。
【解決手段】運転支援装置60は、車両の走行経路を取得する経路取得部61aと、経路取得部61aが取得した走行経路から車両が逸脱したか否かを判定する経路逸脱判定部61bと、車両の車速を検出する車速検出部61cと、経路逸脱判定部61bにより車両が走行経路から逸脱したと判定された場合、車速検出部61cが検出した車速の変化に基づき、車両の逆走を禁止する旨の案内を行うか否かを決定する案内制御部61dとを備える。
(もっと読む)
安全運転診断装置
【課題】交差点において安全確認をしていないにもかかわらず、安全確認をしたと誤判定することを低減することができる安全運転診断装置を提供すること。
【解決手段】自車両Cが交差点に進入する際にドライバが安全確認動作を行うべき範囲において、ドライバの視線の水平角を示す水平角信号をサンプリングし(S10〜S15)、このサンプリングした水平角信号からパワースペクトルを計算する(S16)。そして、計算されたパワースペクトルにおいて、安全確認に必要な前記水平角の変化の周波数範囲(0.2〜1.5Hz)におけるパワーの極大値の総和を計算し(S17)、この総和が所定値(1400)に達していない場合はドライバによる安全確認がなされてないと判定し、所定値(1400)以上である場合はドライバによる安全確認がなされたと判定する(S18)。
(もっと読む)
投光器制御装置
【課題】 眼鏡を掛けている人物のように撮像目標の前面に反射面を有する対象物に対しても撮像目標の画像を正しく取得することを可能とした投光器制御装置を提供する。
【解決手段】 撮像対象4の撮像対象位置における撮像範囲面(P1のうちカメラ1の画角αC内に入る部分)を判定し、この範囲面を垂直断面とする四角柱より外側(同四角柱と同一水平断面上であれば図中太矢印に示す範囲)でかつ、この撮像範囲面よりカメラ1寄りに照明用の投光器を配置する。
(もっと読む)
141 - 160 / 2,931
[ Back to top ]