
Fターム[5H180LL04]の内容
Fターム[5H180LL04]に分類される特許
161 - 180 / 2,931
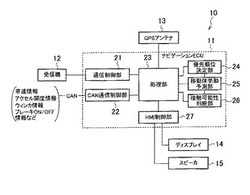
車両運転支援装置及び支援方法
【課題】移動体の挙動予測を効率的に行って接触の可能性を迅速に判断し、適切なタイミングで警告情報を提示できるようにする。
【解決手段】車両に搭載されたカーナビゲーションシステム10のナビゲーションECU11が、第1光ビーコン4から受信した運転支援情報に含まれる交差点構造情報に基づいて、サービス対象交差点における移動体検知エリアを複数のエリアに分割し、CAN経由で取得される車速情報に基づいて、分割した複数のエリアの優先順位を決定する。そして、優先順位の高いエリアから順に当該エリアに存在する歩行者や自転車の挙動を運転支援情報に含まれる移動体状態情報に基づいて予測し、その予測結果とCAN経由で取得される車両情報とに基づいて注意喚起の必要性を判断して、注意喚起の必要性ありと判断した場合に、ディスプレイ14での画面表示やスピーカ15からの音声出力により警告情報を提示する。
(もっと読む)
半自律型無人車両の遠隔操縦システム

【課題】操縦者の意図した通りの高速走行を、安全に行うことができるようにする。
【解決手段】測距データに基づいて走行可能エリアを抽出するエリア抽出手段10aと、走行状態を取得する走行状態取得手段10bと、走行状態と走行可能エリアとに基づき、操縦限界を示す操縦限界情報を生成する操縦限界情報生成手段10cと、操縦限界情報を遠隔操縦装置に向けて送信する操縦限界情報送信手段10dと、操縦限界情報に基づき制限され、かつ、遠隔操縦装置から送出された操縦情報に従い、半自律型無人車両を走行させる自律走行手段10eとを半自律型無人車両に設けたこと、操縦限界情報を表示部に表示させる操縦限界情報表示手段と、操縦限界情報に基づき制限された操縦情報を生成する操縦情報生成手段と、電気通信回線を通じ、生成した操縦情報を半自律型無人車両に向けて送信する操縦情報送信手段とを遠隔操縦装置に設けている。
(もっと読む)
車両用画像表示装置
【課題】自車両の前方や後方等を撮影して運転者の運転を補助し、撮影した画像に含まれる個人情報を保護することができる車両用画像表示装置を提供する。
【解決手段】車両の前方及び後方の映像を夫々撮影する複数のカメラを含み前記車両の周囲を撮影可能な撮像部と、複数のカメラで撮影したカメラ画像のうち、自車両の前方又は後方に近接する第1の車両の画像に含まれる個人情報保護領域を目隠しするマスク画像を生成するマスク画像生成部と、カメラ画像を利用して第1の車両の前方又は後方での第2の車両の有無を監視する周辺監視部と、周辺監視部によって第2の車両の存在を判別したとき、第2の車両の存在を示す識別画像を生成する識別画像生成部と、カメラ画像にマスク画像及び識別画像を合成して表示部に表示する合成処理部と、を具備する。
を具備する。
(もっと読む)
情報提供システム及び情報提供装置
【課題】交通状況等に応じて異なる情報を速やかに提供することができる情報提供システム及び情報提供装置を提供する。
【解決手段】制御部10は、車両感知器4から送信された車両情報に基づいて、通常図形データ(図形データ121A)又は注意図形データ(図形データ121B)のいずれか一方を選択し、選択した図形データを光ビーコン3へ送信する。例えば、車両の速度が速度閾値(例えば、80km/h)より小さい場合には、通常図形データを選択することにより、車両の表示部に道路の背景図上に「走行注意」の文字又は図形を表示させる。また、車両の速度が速度閾値より大きい場合には、注意図形データを選択することにより、車両の表示部に道路の背景図上に「速度注意」の文字又は図形などを表示させる。
(もっと読む)
車両検出装置、車両検出プログラム、および車両検出方法
【課題】 ミリ波レーダと画像センサを併用することにより、自車両周囲の前方車及び対向車を検出することを可能とする車載型の車両検出技術を提供する。
【解決手段】
発明の一態様は、撮像装置で取得した画像内において前記位置取得センサから取得した複数の車両候補点に対応する位置を算出し、その周囲を画像処理領域とし、位置取得センサより出力される距離情報と所定の車種パターンに基づいて種々のサイズのウィンドウを画像処理領域内に作成し、該ウィンドウに対し、車両形状モデルを用いて識別処理を行い、車両の存在を示す候補ウィンドウを判定し、候補ウィンドウを所定の条件と照合し車両領域を確定し車両位置を出力することを特徴とする。
(もっと読む)
走行支援内容決定装置、走行支援内容決定方法および走行支援内容決定プログラム
【課題】多様な実行対象プログラムで利用される情報の信頼度を特定するための精度情報を効率的に管理し、精度情報を容易に選択する技術の提供。
【解決手段】車両の状態および前記車両の周囲の状態に基づいて、プログラムによって実行可能な複数の機能から実行対象となる実行対象機能を選択し、前記プログラムで利用される情報の信頼度を特定するための精度情報を複数の要素毎に記録した記録媒体を参照し、前記実行対象機能に対応する要素を前記複数の要素から選択し、選択された要素の前記精度情報を前記記録媒体から取得し、当該精度情報に基づいて、前記実行対象プログラムで利用される情報の信頼度を特定し、前記信頼度に応じて前記実行対象機能を実行するか否かを決定する。
(もっと読む)
駐車空間認識装置
【課題】水平広角度ソナーを用いても駐車空間の認識精度を高めることができる駐車空間認識装置を提供する。
【解決手段】駐車空間認識装置は、駐車領域検出ラインLに駐車車両検出部Laが複数ある場合には、座標平面上に、各駐車車両の仮想中心点Eを設定し、さらに仮想駐車位置11aを設定する。次に、駐車空間認識装置は、仮想駐車位置11a、11a間のX軸に平行な最短距離を算出して、この最短距離が一般的な駐車幅以上である場合には、仮想駐車位置11a、11a間に駐車空間Sがあると判断して、この駐車空間Sの存在をモニタに表示する。
(もっと読む)
車車間通信処理方法および車車間通信処理装置
【課題】車車間通信の相手の車両が認識できなくても、車車間通信の情報のやり取りにより、自車の位置や車車間通信の通信相手の車両の位置を精度よく検出できるようにする。
【解決手段】第1、第2の車両2、3は、それぞれが検出した周囲車両の位置の情報を含む精度の高い車両情報を車車間通信によって相互にやり取りし、このとき、周囲車両として第1、第2の車両2、3が共通に検出する第3の車両42が含まれると、第1、第2の車両2、3は互いに直接に認識できなくても、検出した周囲車両の車両情報と車車間通信により受信した車両情報との比較から第3の車両42の車両情報を判定して特定し、GPSの測位情報を用いた場合より精度の高い第1、第2の車両2、3それぞれが検出した第3の車両42の位置情報により、第3の車両42の位置を基準にして第1、第2の車両2、3の少なくともいずれか一方の位置を精度よく算出する。
(もっと読む)
車両用距離算出装置
【課題】本発明は、撮像環境下の日照条件が変化した場合でも、正確に対象物までの距離を算出することができる車両用距離算出装置を提供する。
【解決手段】撮像手段101は、自車両の所定位置に、その撮像範囲内に自車両の一部が入るように設置され、自車両および自車両の周辺を撮像する。自車領域抽出手段102は、撮像手段101によって撮像された画像から自車両の領域を抽出する。画質推定手段103は、自車領域抽出手段102によって抽出された自車両領域の画像を解析して入力画像の画質を推定する。画質調整手段104は、画質推定手段103による推定結果に基づき入力画像の画質を調整する。対象物検出手段105は、画質調整手段104によって調整された映像を処理して対象物を検出する。距離算出手段106は、対象物検出手段105によって検出された対象物までの距離を算出する。
(もっと読む)
路車間通信システムおよび路側通信装置
【課題】路車間通信システムにおいて、危険度の高い車両と路側通信装置の間での通信成立の確率を向上させるための技術を提供する。
【解決手段】通信装置を備える車両と、前記車両と通信を行って情報を送受信する路側通信装置とを有する路車間通信システムであって、前記車両は、少なくとも位置および速さを含む自車の走行状態を取得して前記路側通信装置に送信し、前記路側通信装置は、前記車両から受信した走行状態に基づいて車両ごとの危険度を判定し、当該危険度が高い車両に対して多くの通信リソースを割当てる割当て制御部を備えることを特徴とする路車間通信システムを用いる。
(もっと読む)
車両用運転支援装置
【課題】路側通信機の情報を乗員へ報知可能な車両用運転支援装置において、自車両と移動体の接近度と情報の劣化度とを乗員に対して報知でき、情報の劣化度に応じた接近度を報知可能な車両用運転支援装置を提供する。
【解決手段】運転支援装置は、路上の移動体を検出可能な路側ユニットから自車両前方の移動体に関する情報を受信し、この移動体の情報を乗員へ報知するように構成されている。存在領域算出部16は、移動体を検出した場合、移動体が交差点に到達するまでの期間推定するように構成され、移動体を撮像した時点からの経過時間に起因した情報の曖昧さを移動体の存在領域の算出に反映している。
(もっと読む)
物体検出装置
【課題】レーダ装置が検出した物体について、衝突判断の対象物とする必要があるか否かの判断を適切に行うことのできる物体検出装置を提供する。
【解決手段】物体検出装置は、車両の周辺の物体を検出する検出手段と、検出手段が検出した物体について、当該物体の進行方向、当該進行方向から算出される物体の存在位置、および進行方向を示す直線と車両の中心軸とがなす角である進入角度を示す車両情報を算出する処理手段と、車両から車幅方向に沿った物体までの側方距離および進行方向を示す直線と車両の中心軸とがなす角の角度に基づいて予め設定された判定範囲を示す判定情報を記憶する記憶手段と、処理手段が算出した車両情報を用いて、存在位置および進入角度が判定範囲内であるか否かに基づいて物体を車両と衝突の危険性判断の判断対象である衝突判定対象物とするか否かを判定する判定手段とを備える。
(もっと読む)
運転誘導装置
【課題】潜在的な危険に対する安全性をより向上させ、有益な情報を提供することが可能な運転誘導装置を提供する。
【解決手段】判定処理ECU40が、自車両V0の通過領域である移動領域TRと、自車両V0の周辺に潜在的に存在する移動体V1等について、移動体V1等の通過領域である移動領域TRを予測する。判定処理ECU40は、予測した自車両V0と移動体V1等との移動領域TRとの重複領域に基づいて、移動領域TRの重要度Iを算出するため、潜在的な危険に基づいて自車両V0が通過する領域における運転の難易度を算出できる。判定処理ECU40は、算出した重要度IとドライバーDの運転技量Tとに応じて自車両V0が将来走行すべき経路を設定し、運転支援ECU50が設定した経路にドライバーDを誘導するため、潜在的な危険に対する安全性をより向上させ、有益な情報を提供することが可能となる。
(もっと読む)
無線装置
【課題】精度の高い位置情報を取得可能な無線装置を提供する。
【解決手段】車両CA1に搭載された無線装置10は、車両CA2に搭載された無線装置10と共通して受信できるGPS信号を送信するGSP衛星R1,R3〜R6から受信したGPS信号に基づいて、車両CA1とGSP衛星R1,R3〜R6との擬似距離P1を演算し、車両CA2とGSP衛星R1,R3〜R6との擬似距離P2を車両CA2に搭載された無線装置10から受信する。また、車両CA1に搭載された無線装置10は、擬似距離P1と擬似距離P2との差である擬似距離差を演算し、車両CA1と車両CA2との高度差を3次元電子地図を用いて検出する。そして、車両CA1に搭載された無線装置10は、擬似距離差と、高度差とに基づいて、車両CA1と車両CA2との相対位置を演算する。
(もっと読む)
車両位置演算装置及び車両位置演算方法
【課題】低コスト化を実現できる車両位置演算装置を提供する。
【解決手段】複数車線道路のうち、一の車線を走行する自車両の位置を計測する自車両位置計測手段と、複数車線道路のうち、他の車線を走行する他車両を検出するセンサ11と、センサ11の検出信号に基づき、自車両に対する他車両の方位を演算する他車両方位演算手段と、一の車線と他の車線との間隔を特定する車線間隔特定手段と、自車両の位置、他車両の方位及び間隔に基づいて、他車両の位置を演算する他車両位置演算手段を有する。
(もっと読む)
車両走行支援装置
【課題】道路の車線の実勢速度を正確に把握し、実勢速度に応じた自車両の車速制御を行うことを可能にする車両走行支援装置を提供することを目的とする。
【解決手段】本発明のシステムは、複数の車線をもつ道路上で自車両の走行を支援するものであって、自車両の周辺を走行する周辺車両の車両位置を通信により取得する車車間通信手段と、自車両との間で車車間通信可能な通信車両の台数を、道路の各車線ごとに計数する通信車両計数手段と、自車両との間で車車間通信が不可能であり通信車両同士の間を走行する間走非通信車両の台数を、道路の各車線ごとに推定する間走非通信車両推定手段と、を備え、道路の各車線のうち、通信車両の台数と間走非通信車両の台数と、の和で示される評価関数Jが最も大きい車線へ、自車両を誘導する。
(もっと読む)
移動体検知装置および移動体検知方法
【課題】光量が十分でない環境において非発光の移動体を検知する装置および方法を提供する。
【解決手段】移動体検知装置は、画像取得部、差分画像生成部、算出部、および警告出力部を備える。画像取得部は、カメラにより撮影された1または複数の画像から生成される第1の画像、および前記カメラにより前記1または複数の画像よりも後に撮影された第2の画像、を取得する。差分画像生成部は、前記第1の画像の各画素値から前記第2の画像の対応する各画素値をそれぞれ引算して差分画像を生成する。算出部は、前記差分画像において所定の閾値レベルを越える画素値を有する画素の数に基づいて隠蔽パラメータを算出する。そして、警告出力部は、前記隠蔽パラメータが所定の条件を満たすときに警告を出力する。
(もっと読む)
移動通信装置、通信方法および通信システム
【課題】通信ロスを低減すること。
【解決手段】移動通信装置100は、記憶部111と、エリア推定部112と、選択部113と、送信部114と、を備えている。記憶部111は、各エリアと各送信リソースを対応付ける対応情報を記憶する。エリア推定部112は、各エリアのうちの自装置が位置するエリアを推定する。選択部113は、記憶部111によって記憶された対応情報においてエリア推定部112によって推定されたエリアと対応付けられた送信リソースを選択する。送信部114は、選択部113によって選択された送信リソースを用いて他の移動通信装置100へデータを送信する。
(もっと読む)
合流支援装置及び合流支援方法
【課題】実際の道路形状に応じた効果的な合流支援ができる合流支援装置を提供する。
【解決手段】自車両の位置及び速度に関する情報を取得する自車両情報取得手段と、本線上の車両の位置及び速度に関する情報を取得する周囲車両情報取得手段と、合流車線の長さを取得する合流車線情報取得手段と、自車両情報取得手段により取得される情報と合流車線の長さに基づき、合流車線を分割し、複数の合流可能エリアを設定するエリア設定手段と、合流の可否の判定基準となる速度閾値を設定する速度閾値設定手段と、自車両の速度と速度閾値を比較して、合流可否を判定する合流可否判定手段と、合流可否判定手段により判定される結果を運転者へ報知する報知手段とを有し、速度閾値設定手段は、周囲車両情報取得手段により取得される情報に応じて、複数の合流可能エリア毎に速度閾値を設定する。
(もっと読む)
走行支援装置及び走行支援方法
【課題】狭部を通過するための最適な経路を運転者に認識させることができるようにする。
【解決手段】狭部通過のため、自車両が現在位置から現在の舵角を維持して進行したときの第1軌跡と、狭部位置の手前で自車両を停車させて舵角を変更する舵角変更ポイントと、自車両が前記舵角変更ポイントから当該舵角変更ポイントで変更した後の舵角を維持して進行したときの第2軌跡とを算出して、第1軌跡と舵角変更ポイントと第2軌跡とからなる狭部通過の経路情報を、自車両周囲の俯瞰画像などに重畳して支援画像としてモニタに表示する。
(もっと読む)
161 - 180 / 2,931
[ Back to top ]