
Fターム[5H180LL06]の内容
Fターム[5H180LL06]の下位に属するFターム
音による警報であるもの (2,307)
音以外の警報であるもの (2,573)
Fターム[5H180LL06]に分類される特許
21 - 40 / 581
人横断支援車両システム及び人横断支援方法
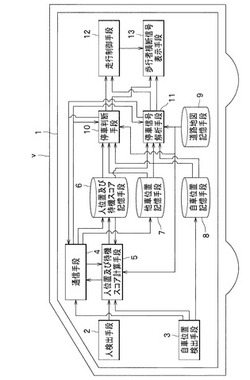
【課題】横断歩道が設置されていない道路においても、歩行者の安全な道路横断を支援する歩行者横断支援車両システムを提供する。
【解決手段】人を検出する人検出手段2と、車両の位置情報を検出する自車位置検出手段3と、人検出手段2が検出した人を横断候補者として、横断候補者の絶対的な位置を計算するとともに、横断候補者が道路を横断するために待機している時間を計測して待機状態の指標である待機スコアを計算し、計算結果を人位置及び待機スコア記憶手段6に記憶する位置及び待機スコア計算手段5と、横断候補者の人位置および待機スコアに基づいて、車両を停車させるか否かを判断する停車判断手段10と、停車判断手段が車両を停車させると判断した場合に車両を停車させる走行制御手段12と、停車判断手段の指令に基づき、横断候補者に対し道路を横断可能か否かの旨の情報を表示する信号機である歩行者横断信号表示手段13と、を備える。
(もっと読む)
車両の制御装置

【課題】自動車等の車両において、適切なタイミングで運転支援制御を実行する。
【解決手段】車両の制御装置は、車両が停止する際の状況を検出する状況検出手段130と、車両が停止する際の運転者による減速タイミングを検出する減速検出手段140と、状況及び減速タイミングを互いに関連づけて学習を行う学習手段120と、学習後に、走行中の車両が学習された状況に近い状態となったことを認識する状況認識手段150と、状況に近い状態であることが認識された場合に、学習された状況に関連づけられた減速タイミングに応じて運転支援制御を行う運転支援制御手段160とを備える。
(もっと読む)
車両の衝突を回避するための装置
【課題】運転者の急ぎ度合いを考慮して衝突可能性を判定し、より的確なタイミングで衝突回避動作を発動できるようにする。
【解決手段】車両が一時停止したときの該車両の走行状態に基づいて、該車両の運転についての急ぎ度合いを判定し、該判定された急ぎ度合いに応じて、該一時停止した後に車両が発進するときの加速度(Ga)を推定する。車両が発進してから、該推定された加速度に基づいて、接近してくる移動物体との衝突の可能性を判定し、該衝突の可能性の判定結果に基づいて、衝突回避のための動作を発動する。
(もっと読む)
運転支援装置
【課題】車線変更の開始時点を迅速に且つ精度良く推定することができる運転支援装置を提供すること。
【解決手段】運転支援装置1では、車線変更推定部13は、ウィンカーセンサ3によってウィンカーONが検出された第1の時点における曲率変化速度が基準曲率変化速度以上である場合、曲率変化速度が基準曲率変化速度であった第2の時点を車線変更開始時点と推定するため、車線変更開始後にウィンカーが操作された場合であっても、その操作の遅れを考慮して車線変更の開始時点を精度良く推定できる。また、ウィンカーONが検出された時点で既に得られている走行情報により車線変更の開始時点を推定するため、車線変更の開始時点を迅速に推定できる。
(もっと読む)
漫然状態判定装置、方法及びプログラム
【課題】簡易な処理により判定対象者の漫然状態を安定した精度で判定する。
【解決手段】運転者の顔を撮像することで得られた画像を取得し(52)、眼球回転角を演算し(54)、眼球の回転速度のベクトルの大きさTを所定値Tθと比較してサッカードが生じているか否かを判定し(60)、検知したサッカードの振幅・方向を演算・記憶する(74)と共に、運転者の視線位置を演算・記憶する(76,78)ことを繰り返す。漫然状態の判定時期が到来すると(80が肯定)、振幅が所定値A以下のサッカードの割合が閾値Taよりも大きいか否か(84)、方向が縦方向に分類される範囲内のサッカードの割合が閾値Tdよりも小さいか否か(88)、視線位置が集中している箇所の数が2以上か否か(92)を順に判定し、何れかの判定が肯定されると漫然状態と判定し、警報出力(94)等の処理を行う。
(もっと読む)
車両用周辺監視装置
【課題】本発明は、運転者への不要な障害物検出通知を抑制することを課題とする。
【解決手段】車外の画像を撮像する撮像手段と、車両の運転者の視線の方向を検出する視線検出手段と、車両のハンドルの操舵角方向を検出する操舵角検出手段と、前記撮像手段によって撮像された画像に基づいて障害物を検出する障害物検出手段と、前記障害物検出手段によって、前記視線検出手段によって検出された運転者の視線の方向から外れた所定範囲内に障害物が検出され、且つ運転者の視線の方向と前記操舵角検出手段によって検出されたハンドルの操舵角方向とが一致する場合に、障害物の存在を車両の運転者に通知する通知手段と、を備えている。
(もっと読む)
衝突回避支援装置、および衝突回避支援プログラム
【課題】自車両が車線変更する際に他車両と衝突しないように支援を行う衝突回避支援装置において、車線変更時の運転者の負担をより軽減できるようにする。
【解決手段】衝突回避支援システムにおいては、自車両が現在の速度のまま車線変更する際に必要となる等速変更領域として設定するとともに、自車両が加速してから車線変更する際に必要となる加速変更領域、および自車両が減速してから車線変更する際に必要となる減速変更領域を設定する(S210)。そして、各変更領域設定手段が設定した各領域のうち、他車両が存在しない領域を抽出する(S230)。さらに、他車両が存在しない領域が存在しない場合、車線変更すると危険であると判断し、等速変更領域に他車両が存在しない場合、現在の速度のまま車線変更可能と判断し、加速変更領域または減速変更領域に他車両が存在しない場合、加速または減速すれば車線変更可能と判断する(S150)。
(もっと読む)
障害物通知装置および障害物通知方法
【課題】 本発明は道路上にある落下物や停止車両などの障害物を走行する車両に通知する障害物通知装置の技術に関するものである。
【解決手段】 本発明の障害物通知装置は、道路上の領域を検知範囲に含むように配置され進入する車両に道路上の障害物を通知するものあり、車両の進入方向にあって領域内の所定の位置を越える道路上の領域の障害物を検知する第1検知手段と、所定の位置の手前の道路上の領域の障害物を検知する第2検知手段と、天候を検知する天候検知手段と、天候検知手段が天候を第1の状態と検知した場合に第1検知手段からの検知結果を障害物情報として出力し、天候を第2の状態と検知した場合に第1検知手段と第2検知手段とからの検知結果を障害物情報として出力する障害物情報出力手段とを備える、よう構成する。
(もっと読む)
運転支援装置
【課題】運転支援装置において、自車両と衝突する可能性があるものがあるか否かを正確に把握し、運転者が不要な警報を受けることがないようにすることにある。
【解決手段】制御手段(3)は、衝突可能性判定手段(3C)により衝突する可能性があると判定された対象物を運転者(P)が認識したか否かを判定する認識判定手段(3D)を備え、この認識判定手段(3D)により対象物を運転者(P)が認識したと判定された場合に警報手段(9)から警報を出力しないように制御する。
(もっと読む)
運転状態判定装置
【課題】本発明は、運転者の足裏位置に基づいて運転者がブレーキペダルの操作を開始するまでにかかる時間を推定することで、運転者の危機対応状態を判定することができる運転状態判定装置を提供する。
【解決手段】本発明に係る運転状態判定装置1は、運転者の足裏位置を検出する足裏位置検出センサ7と、足裏位置検出手段の検出した足裏位置に基づいて、運転者がブレーキペダルの操作を開始するまでにかかる時間を推定する推定し、その推定結果に基づいて、運転者の運転状態を判定するECU2と、を備える。この運転状態判定装置1によれば、運転者の足裏位置から運転者がブレーキペダルの操作を開始するまでにかかる時間を推定することで、障害物接近等の危機に対して運転者がすぐに対応できる状態であるか否か、すなわち運転者の危機対応状態を判定することができる。
(もっと読む)
画像処理装置
【課題】車両の走行ルートに沿った路面のデータベース画像を生成することができる技術を提供する。
【解決手段】単眼カメラ3の撮影画像が背景画像取得手段6aにより取得されたときの自車両1の位置情報が位置情報取得手段6bにより取得され、位置情報取得手段6aの自車両1の位置情報に基づいて、生成手段6dにより、各フレームの撮影画像が射影変換された障害物を含まない上方視の画像がつなぎ合わされて、路面領域が連続する路面のデータベース画像が生成される。したがって、走行中の自車両1の単眼カメラ3の撮影画像に基づいて路面のデータベース画像を生成することができるため、例えば通勤の際に単眼カメラ3により撮影された撮影画像から自車両1の走行ルートに沿った路面のデータベース画像を生成することができる。
(もっと読む)
情報処理装置、車載装置、情報処理システム、情報処理方法、および、プログラム
【課題】ドライバー個人の生活習慣などの内的要因を考慮して、ドライバー通知を行うか否かを判断する技術を提供することを目的とする。
【解決手段】アドバイス情報を提供すべき複数の車両ごとに、当該車両の前記位置または走行経路ごとの走行回数を記録する。そして、複数の車両ごとに、当該車両の前記位置または走行回数が所定回数を超える走行経路に基づいて、通知不要領域を設定する領域設定手段と、複数の車両ごとに、複数の地点に応じたアドバイス情報を選択する選択手段とを備える、この選択手段は、アドバイス情報の選択対象となる地点が、当該車両の通知不要領域に含まれる場合は、アドバイス情報を選択しない。これにより。これにより、ドライバーの位置または走行経路の走行回数に応じたアドバイス情報を選択できる。
(もっと読む)
運転支援装置及びプログラム
【課題】地図情報や位置情報に問題がある場合でも、市街地等の目的とするエリアを精度良く判定して、そのエリアに対応した好適な制御を行うことができる運転支援装置及びプログラムを提供すること。
【解決手段】ステップ140では、自車両と歩行者との横位置(横方向における距離)が近いか否かを判定する。ステップ150では、歩行者の数が多いか否かを判定する。前記ステップ140及びステップ150で肯定判断されて進むステップ170では、自車両が市街地を走行していると判断して、安全のために、車速を制限する制御を行う。ステップ160では、自車両と歩行者との横位置が遠く、また、自車両の前方の歩行者の数が少ないので、市街地でなく、市街地から外れた一般道路であると判断して、一般道路に適した制限車速に設定する。
(もっと読む)
車両周辺監視装置
【課題】人体等の生体(哺乳動物)の温度に近いコンクリート等の壁等が電柱等により遮られた場合に発生する非生体(前記コンクリート等の壁)を生体と誤検知してしまうことを防止する車両周辺監視装置を提供する。
【解決手段】探索マスク領域101内に含まれる生体候補の形状の時間変化が所定以下であるとみなしたとき、生体候補を生体として認識するようにしたので、人体等の生体(哺乳動物)の温度に近いコンクリート等の壁等が電柱等により遮られた場合に遮られなかった人体サイズに近似する領域を生体と誤検知してしまうという不都合を防止できる。電柱等のオクルージョン物体に遮られた壁等で遮られなかった領域は、画像上、実空間上の形状が時間変化するのに対して、人体等の生体は、時間変化がないという知見も基づき誤検知を防止する。
(もっと読む)
運転支援装置
【課題】車車間通信によって受信した他車両の自位置に基づいて運転支援を行う運転支援装置において、運転者に違和感を与えることなく、運転支援を適切に行う。
【解決手段】運転支援装置(1)は、自位置を認識する自位置認識システム(300)を有する自車両(100)に搭載され、自車両の周辺に位置する他車両(900)から、他車両が有する自位置認識システム(930)によって認識された他車両自位置を受信し、この受信した他車両自位置に基づいて運転支援を行う運転支援装置であって、他車両が有する自位置認識システムの位置精度の信頼度についての他車両信頼度基準と、自車両が有する自位置認識システムの位置精度の信頼度についての自車両信頼度基準とが互いに同じであるか否かを判定する判定手段(21)と、判定手段による判定結果に応じて、運転支援を行う運転支援手段(22)とを備える。
(もっと読む)
車両のテールランプ検出装置
【課題】車両前方を撮像して先行車のテールランプを検出するテールランプ検出装置において、カメラの画素サイズが小さくても確実に先行車のテールランプを識別する。
【解決手段】カメラからの映像を赤色範囲の狭い第1赤フィルタでフィルタリングおよび2値化した第1フィルタ画像F1からテールランプ候補Kを抽出し、候補が連続して所定回数抽出されその変位が小さいときに該候補をテールランプと確定する。狭い赤色範囲のフィルタによりテールランプが効率よく抽出される。一旦テールランプが検出されると、赤色範囲の広い第2赤フィルタによる第2フィルタ画像によりそのテールランプを追跡する。広い赤色範囲のフィルタにより、テールランプが背景と混ざり合って暗くなっても、確実に追跡を継続することができる。
(もっと読む)
車両位置検出装置、車両位置検出方法、及び車両位置検出プログラム
【課題】広角画像を用いて行う、車線に対する車両の位置関係の検出の精度を良くする。
【解決手段】白線部分画像領域抽出処理S110は、道路を走行中の車両の走行方向に対する側方の方向を撮像した側方画像から、第一部分画像領域及び第二部分画像領域を抽出する。この2つの部分画像領域は、道路の路面上に描かれており当該車両が走行している車線の境界を表している白線の破線において当該破線の空線部分を挟み込んでいる白線部分が各々に映っている領域である。推定処理S112は、第一部分画像領域に映っている第一白線と第二部分画像領域に映っている第二白線とを滑らかに結ぶ推定線を側方画像上に推定する。この推定は、側方画像上での第一白線及び第二白線の各々についての線端の位置及び当該線端での向きに基づいて行われる。位置関係検出処理S113は、この推定線の側方画像上での位置に基づき、車線に対する車両の位置関係を検出する。
(もっと読む)
運転支援装置
【課題】自車両が交差点に進入する際、燃費向上運転支援を適切に行う。
【解決手段】運転支援装置は、交差点に設置された信号機(400)の信号サイクル情報、及びこの交差点にて交わる複数の道路のうち自車両が走行する道路の停止線(500)の手前に位置する所定領域(A1)に存在する他車両の存在状況を示す存在状況情報を、この交差点に設置された路側送信機(220)から受信する受信手段(20)と、信号サイクル情報及び存在状況情報に基づいて、自車両が停止する停止位置を予測する予測手段(110)と、予測手段によって予測された停止位置よりも手前で燃費向上運転支援を実施する実施手段(120)とを備える。
(もっと読む)
撮像システム
【課題】追跡対象の位置および大きさをより正確に検出することができる。
【解決手段】交差点に設けられる撮像システムであって、前記交差点内および前記交差点周辺を移動する複数の対象を撮像する全体視撮像部と、前記交差点に設置された一対の歩行者用信号および自動車用信号の少なくとも一方の点灯状態を示す信号情報を取得する信号情報取得部と、前記信号情報に基づいて、前記全体視撮像部の撮像データから事故の危険性の高い前記対象を追跡対象として特定する追跡対象特定部と、前記全体視撮像部の撮像素子における画素密度よりも高い画素密度の撮像素子を有し、前記追跡対象を追跡しながら撮像する複数の特定対象撮像部と、前記特定対象撮像部の撮像方向および焦点を制御する制御部と、を備えることを特徴とする撮像システムを提供する。
(もっと読む)
撮像システム
【課題】追跡対象の位置および大きさをより正確に検出することができる。
【解決手段】交差点に設けられる撮像システムであって、前記交差点内を移動する歩行者を撮像する全体視撮像部と、予め定められた条件に基づいて、前記全体視撮像部の撮像データから追跡対象とすべき前記歩行者を特定する追跡対象特定部と、前記全体視撮像部の撮像素子における画素密度よりも高い画素密度の撮像素子を有し、前記追跡対象を追跡しながら撮像する複数の特定対象撮像部と、前記特定対象撮像部の撮像データに基づいて、前記追跡対象が事故に遭う危険性の高い危険状態であるか否かを判定する危険状態判定部と、を備えることを特徴とする撮像システムを提供する。
(もっと読む)
21 - 40 / 581
[ Back to top ]