
Fターム[5H180LL06]の内容
Fターム[5H180LL06]の下位に属するFターム
音による警報であるもの (2,307)
音以外の警報であるもの (2,573)
Fターム[5H180LL06]に分類される特許
61 - 80 / 581
無線通信装置
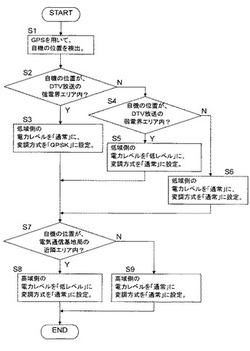
【課題】そのときの状況に適応した送信方式を採用し、電波干渉の抑圧と通信性能の維持とを、できるだけ両立させることが可能となる無線通信装置を提供する。
【解決手段】特定の周波数帯を用いた無線通信を行う無線通信装置であって、他の周波数帯を用いる無線通信システムとの電波干渉の度合が、所定基準より高くなると見込まれるエリアとして特定された、特定エリアの情報が記録されている記録部と、自機の現在位置を検出する位置検出部と、自機が前記特定エリア内に位置しているかを判断し、位置していないと判断した場合には、前記無線通信の送信方式を、所定の通常方式に設定し、位置していると判断した場合には、前記無線通信の送信方式を、通常方式より前記無線通信システムとの電波干渉の度合を低減させる干渉低減方式に設定する、送信方式設定部と、を備えた無線通信装置とする。
(もっと読む)
安全運転支援装置

【課題】安全運転支援システムのサービス開始点である路側装置の位置から自車両が走行した相対的な走行位置を正確に補正できる安全運転支援装置を提供する。
【解決手段】路側装置7から受信した走行支援情報9のデータ量、路側装置7との間の通信速度及び、情報処理部4への装置内のデータ転送速度に基づいて、路側装置7から走行支援情報9の受信を開始してからの通信時間、情報処理部4へ走行支援情報9の転送が完了するまでの転送時間及び走行支援情報9の解析を完了するまでの解析時間を求め、走行支援情報9の解析完了時点において自車両1Aが路側装置7の位置から走行した相対的な走行位置を算出するにあたり、通信時間、転送時間及び解析時間に自車両1Aが走行した距離を、記憶部5に記憶された履歴データから求めた所定の周期毎の走行距離を用いて補正する。
(もっと読む)
危険性判断装置及び危険性判断システム
【課題】所定エリア内に存在する車両の危険性を判断する技術において、処理負荷の低減を図ることが可能な危険性判断装置及び危険性判断システムを提供すること。
【解決手段】自車両が所定エリアを通過する際に、衝突危険性を判断する装置において、所定エリアに対する危険度の重み付けを設定し、危険度が高い場合のみ衝突危険性を判断する。これにより、実際に危険性が高い場合のみ衝突危険性を判断することができるため、処理負荷が軽減される。
(もっと読む)
道路情報特定方法、道路情報特定装置、ナビゲーションシステム、道路情報を特定するためのコンピュータプログラム及びそのコンピュータプログラムを記録した記録媒体
【課題】一時停止の中でも、警告が真に必要な一時停止が付された交差点進入道路を特定し、当該進入道路ついての道路情報を自動的に作成する方法及びその装置を提供する。
【解決手段】一時停止情報の付された交差点への進入道路を抽出し、
交差点ごとに当該各進入道路につき、退出道路以外の道路に車輌不在のとき、他の道路(退出道路を含む)から進入する他の車輌の全進路と当該進入道路の車輌の退出進路との交差点における交差の有無を評価し、当該他の車輌の進路と当該進入道路の車輌の進路との交差が認められないとき、該進入道路を特定する。
(もっと読む)
リスク認識システム
【課題】移動体の外界環境に含まれる危険度を認識するためのルールをドライバの運転行動との関係からより直接的に求め、ドライバの状態による差や個人差を許容するルールを抽出して、高精度な危険認識を可能とする。
【解決手段】データ点数を或る程度の時間長で区切り、各学習データD34,D35,D38,D48,D55,D56から冗長性を排除してデータ識別に必要最小限の属性集合を抽出し、極小決定ルールR34,R35,R38,R48,R55,R56を導く。そして、各極小決定ルールに対して、未学習データを信頼度で降順に並べ、所定の閾値以下のデータを削除してクロスバリデーション方式で評価を行うことで、ルールR'34,R'35,R'38,R'48,R'55,R'56を選定する。これにより、ドライバの状態による差や個人差を許容するルールを抽出して高精度な危険認識を可能とするばかりでなく、過学習を防止することができる。
(もっと読む)
ナビゲーション装置および車両制御装置
【課題】検知した現在地情報の信頼性を判断するナビゲーション装置および車両制御装置を提供する。
【解決手段】センサフュージョン部21はセンサ22a〜22dが検出した最新の検出値を取得して現在地を検出する。次に、各々のセンサの誤差と、検出された現在地の確からしさを表す指標値とを算出し、指標値を判定部24へ出力する。センサ監視部23はセンサ22a〜22dの状態を監視し、特定のセンサが異常な状態にある場合には異常信号を判定部24へ出力する。判定部24はまず、センサフュージョン部21が出力する指標値が所定のしきい値を上回っているか否かを調べる。上回っていた場合、スイッチ25を遮断し、自車両2に現在地情報が出力されないようにする。他方、指標値が所定のしきい値以下であった場合には、判定部24は、一定時間後の指標値の予測を行う。一定時間後の指標値がしきい値を上回る場合、自車両2に対してその時刻を通知する。
(もっと読む)
運転支援装置及びプログラム
【課題】交差点の通過に伴う運転動作に関する評価を行う運転支援装置及びプログラムを提供する。
【解決手段】運転支援装置は、交差点に進入する前に走行した進入車線を特定し、進入車線に対応づけられる交差点を退出した後に走行すべき走行予定道路を特定する。また、交差点を退出後に走行した退出道路を特定し、退出道路と走行予定道路とが一致しない場合(S206:NO)、交差点に進入する進入動作を危険動作であると判定する(S207)。これにより、退出道路と走行予定道路とが一致しない場合、交差点に進入する進入動作を危険動作と判定するので、交差点の通過に伴う運転動作を適切に評価することができる。
(もっと読む)
運転支援装置及びプログラム
【課題】追い越し動作に関する評価を行う運転支援装置及びプログラムを提供する。
【解決手段】運転支援装置は、自車両の走行する第一の車線の前方を走行する他車両を検出し(S101:YES)、他車両が走行している道路を他車両が走行し続けると予測される場合(S102:YES)、当該他車両を対象車両として特定し(S103)、左側追い越し判定処理を行う(S104)。自車両2が、第一の車線よりも道路の中央寄りではない第二の車線に車線変更し、対象車両を追い抜き、所定時間内に対象車両の前方において第一の車線へ車線変更した場合、当該追い越し動作を危険動作と判定する(S106)。これにより、追い越し動作が適正でない場合には危険動作であると判定するので、追い越し動作を適切に評価することができる。
(もっと読む)
周辺監視装置
【課題】車両に搭載されて周囲の対象物体との衝突可能性を判定する周辺監視装置において、処理の高速化(フレームレートの向上)を実現する。
【解決手段】ステレオカメラ11,12で得られた時系列画像から時系列情報算出部21で対応点探索処理によって2次元オプティカルフローを算出すると、先ず対象物体候補領域抽出部22が対象物体が存在する可能性の高い候補領域を抽出する。その後、3次元情報取得部23が、ステレオカメラ11,12の画像から前記対象物体の候補領域の3次元情報を取得し、得られた3次元情報と、該周辺監視装置1との位置関係から、衝突判定部24が衝突可能性を判定する。したがって、複雑な物体認識処理や道路モデルなどを必要とせず、時系列画像から算出された2次元オプティカルフローのみを用いて対象物体の候補領域を限定し、3次元での衝突判定を行うことで、処理速度を速くできる。
(もっと読む)
歩行者検知システム
【課題】車両と携帯通信装置を含み、車両進行方向の歩行者の存在を通知する歩行者検知システムにおいて、携帯通信装置が実際に歩行者によって携帯されているかを判断するための技術を提供する。
【解決手段】自機の位置と自機に働く加速度を取得する携帯通信装置と、自車の位置と進行方向と速さを取得する車載通信装置と、前記携帯通信装置が歩行者によって実際に携帯されているか、および、車両の進行方向に歩行者が存在するかを判断し、判断結果に応じて歩行者の存在情報を前記車載通信装置に送信する判断手段とを有し、前記判断手段は、前記加速度が所定値以上である場合に、前記携帯通信装置が歩行者によって実際に携帯されていると判断するような歩行者検知システムを用いる。
(もっと読む)
車両用制御装置
【課題】この発明は、他車両との衝突可能性の判定を精度良く行うことができ、自車両と他車両を同一方法で電子地図上にマッチングすることができ、信頼性を高めることができ、地図データを簡略化し、カーナビゲーション装置を利用する必要のない車両用制御装置を提供することを目的とする。
【解決手段】この発明は、車両用制御装置において、マップマッチング手段により得られる、自車両が次に走行すると推定される交差点と他車両が次に走行すると推定される交差点とを比較し、一致する場合に自車両と他車両が衝突する可能性があると判定する衝突可能性判定手段を備え、衝突可能性判定手段により判定された結果に基づいて、運転者に情報を提供する情報提供手段とを備えることを特徴とする。
(もっと読む)
車載用通信装置
【課題】走行地域の運転に不慣れな運転者の存在を他の車両の運転者に認識させて、その運転者が配慮のある運転を可能となり、安全性の高い走行を実現できる車載用通信装置を提供する。
【解決手段】車両に搭載される車載用通信装置において、自車位置に関する情報と、車両の登録ナンバー情報および/または運転者の住所情報に基づき運転慣れ度を決定する運転慣れ度決定部と、前記運転慣れ度決定部が決定した運転慣れ度に応じて自車位置情報を送信するか否かを決定する送信決定部と、前記送信決定部が自車位置情報を送信することを決定した場合、少なくとも自車位置情報を他車両に搭載された車載用通信装置に直接的または間接的に送信する送信部と、を備える車載用通信装置とした。
(もっと読む)
車載通信装置および通信システム
【課題】車車間通信においても、送信制御をより容易に行うことが可能な車載通信装置および通信システムを提供する。
【解決手段】無線回路22の送信制御に関する指示の情報である送信制御指示情報を含む無線信号を、無線回路22を介して受信した場合に、当該送信制御指示情報に従って無線回路22の送信制御を行う制御部27を備えることによって、車両の外部から送信される無線信号に含まれる送信制御指示情報に従って無線回路22の送信制御を行うことを可能にする。
(もっと読む)
逆走防止装置
【課題】逆走車両を確実に検知し、誤検知を防止することが可能な逆走防止装置を提供する。
【解決手段】ドップラーモジュール11は、検知領域にマイクロ波を放射し、車両からの反射波よりドップラー周波数を検出する。進行方向識別回路16は2つのドップラー周波数の位相差から車両の走行方向を識別する。カウンタ17bは、進行方向識別回路16の出力信号に基づき逆走車両を検出する。測定回路20は、ドップラーモジュール11及びカウンタ17aの出力信号に基づき、検知領域の車両走行方向の距離を算出する。
(もっと読む)
環境予測装置
【課題】適正な走行制御をするにあたって十分な他車両進路の情報を取得することができる環境予測装置を提供する。
【解決手段】走行支援装置10は、環境予測装置1と回避支援部7とを備えている。また、環境予測装置1は、車両状態検出部2、環境状況取得部3、路面状態取得部4と、道路環境取得部5と、車両制御ECU6とを含んで構成されている。車両制御ECU6は、車両状態検出部2が検出した自車両の走行速度vが速いほど予測期間Tを長く設定する予測期間設定部61を備えている。
(もっと読む)
障害物検出装置および障害物検出方法
【課題】障害物の検出精度を極力落とすことなく、障害物検出のために行う画像解析の処理負荷の軽減およびメモリリソースの節約を実現できる「障害物検出装置および障害物検出方法」を提供する。
【解決手段】車載カメラ20により撮影される各フレームの画像における監視範囲の全体領域を複数の小領域に区画化し、全体領域の中で特定の位置に存在する複数の区画の画像を対象として、現フレームの画像と前フレームの画像との比較により障害物の動きベクトルを検出することにより、全体領域の中で特定された一部の領域だけを対象として少ない処理負荷と少ないメモリリソースの使用で動きベクトルを検出できるようにするとともに、障害物が写っているフレームが完全に間引かれてしまう不都合もなくして、障害物が存在するのにその動きベクトルが検出できなくなる事態を極力抑制できるようにする。
(もっと読む)
車載カメラシステム
【課題】 カーナビゲーションシステムに対し、口形の変形量から識別される目的地を示す言葉を送信可能な車載カメラシステムを提供する。
【解決手段】 車内に着座する人物を撮像する撮像部6,8と、前記撮像部6,8により撮像される前記人物の口形及び前記口形の変形量を検出する検出部20と、前記検出部20の検出結果から前記人物の発した言葉を識別する識別部20と、前記識別部20の識別結果をカーナビゲーションシステムに対して送信する送信部22とを備える。
(もっと読む)
車両の走行安全装置
【課題】運転者が安全装置の作動に煩わしさを感じてしまうことを防止しつつ、適切なタイミングで安全装置を作動させる。
【解決手段】車両の走行安全装置10は、所定の接触判定条件に基づき自車両と物体との接触に係る判定を行なう接触判定部24と、接触判定部24の判定結果に応じて接触回避の支援動作を作動させる車両制御部25と、物体検知部21により検知された物体の形状に基づき、自車両の走行路に接続される接続路の状態を判定する接続路判定部22と、自車両の走行路と接続路との接続部付近の見通しの良否を判定する見通し判定部23とを備え、接触判定部24は、接続路の幅が所定閾値以下であって、かつ、接続路の手前位置に検知された路側物により接続部付近の見通しが悪いと判定された場合に、接触回避の支援動作が作動し易くなるようにして接触判定条件を変更する。
(もっと読む)
車両用乗員保護装置
【課題】アイドリングストップ機能を備えた車両において、バッテリの充電量が少なかったり、バッテリが劣化している場合でも、車両停車中に正常に作動する乗員保護装置の提供。
【解決手段】エンジン停止条件が成立したときにエンジンを停止させ、エンジン再始動条件が成立したときに上記エンジンを再始動させるアイドリングストップ機能を備えた車両に搭載され、衝突事故の衝撃から車両の乗員を保護する車両用乗員保護装置であって、上記車両に衝突の危険が迫っていることを検知する衝突検知部と、上記アイドリングストップ機能によりエンジンが停止している間に上記衝突検知部が衝突の危険が迫っていると判断した場合、上記エンジンを再始動させるエンジン始動部と、上記エンジンの駆動力を受けて作動する発電機から電力の供給を受けて、衝突事故の衝撃から乗員を保護するように作動する乗員保護部とを備える。
(もっと読む)
運転支援装置
【課題】 その時の状況に即したより適切な運転支援をおこなう運転支援装置を提供する。
【解決手段】
本発明に係る運転支援装置1は、第1および第2の判定手段として機能するECU2が、対象交差点に進入する自車の車速が、警報を鳴らす車速の閾値である下限車速を上回っていると判定した場合には警報を鳴らし、下限車速以下であると判定した場合には警報を鳴らさない。また、ECU2は、自車の進行方向が直進か否かを判定し、直進でない場合には下限車速を所定の補正値αだけ減らし、直進である場合には下限車速を減らさない。それにより、対象となる交差点に進入する車両が、直進するか否かにより下限車速が変わることとなるため、たとえば対象交差点において右折しようと車両が、直進車両に適用される下限車速以下であっても、下限車速から補正値αを減算した車速よりも高い場合には警報が鳴らされる。
(もっと読む)
61 - 80 / 581
[ Back to top ]