
Fターム[5H180LL06]の内容
Fターム[5H180LL06]の下位に属するFターム
音による警報であるもの (2,307)
音以外の警報であるもの (2,573)
Fターム[5H180LL06]に分類される特許
81 - 100 / 581
走行支援装置
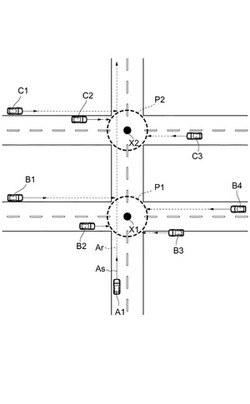
【課題】周辺車両の存在に基づいて行う走行支援の処理負荷を軽減することができる走行支援装置を提供する。
【解決手段】周辺車両の存在に基づいて車両の走行を支援する走行支援装置であって、車両A1の進行方向及び周辺車両Bn、Cnの進行方向のそれぞれと交差点ノードXnを含む範囲の誤差エリアPnとが重なる場合には、周辺車両Bn、Cnを監視対象として運転支援に関する処理を実行する運転支援手段を備えることにより、車両の位置とリンクとをマッチングする処理を行うことなく運転支援に関する処理を開始できるので、交差点Knで衝突する可能性のある車両を簡易な処理で迅速に判断することができる。
(もっと読む)
走行支援装置

【課題】路面被覆物を回避する場合に、より安全に自動車の走行の支援を行うことが可能な走行支援装置を提供する。
【解決手段】走行支援装置1は、道路201の形状を取得する側方直近用レーダ12と、道路201を覆う雪301を検出し、雪301に覆われていない走行可能領域211を抽出する前方監視用レーダ11と、道路201の形状と走行可能領域211とを対比して得られる対比情報に基づいて、走行支援を実施する車両制御ECU18とを備えている。車両制御ECU18は、雪301に覆われていない領域である走行可能領域211が走行車線202に位置するのか追越車線203に位置するのかという情報を加味してブレーキアクチュエータ21と、ステアリングアクチュエータ22と、エンジン制御ECU23とを制御する。
(もっと読む)
境界線認識装置
【課題】複数の処理の処理内容を改良したり新たな機能の処理を追加したりした場合であっても、それら複数の処理を容易に統合できる境界線認識装置を提供する。
【解決手段】境界線候補抽出部30で車載カメラで取得した画像からパターンマッチングやハフ変換など公知の画像処理により道路上の車線の境界線候補を抽出し、抽出した境界線候補の境界線らしさの確信度を1又は2以上の複数の種類の境界線特徴算出部40において尤度で算出する。そして、算出した尤度を境界線特徴統合部50で乗算して統合することにより境界線らしさを示す尤度で出力し、出力される尤度のうち最大の尤度を有する境界線候補を、境界線選択部60において道路上の境界線として選択する。境界線特徴算出部40では、輝度分散や内部エッジ量などを用いて境界線候補の尤度算出するとともに、路面特徴抽出部70などで検出した特徴量により、境界線候補の尤度を変更して出力する。
(もっと読む)
覚醒度低下判定装置
【課題】 車両の走行路に応じて、精度よくドライバの覚醒度の低下を判定することができる覚醒度低下判定装置を提供する。
【解決手段】 覚醒度低下ECU1は、操舵変化パワー算出部11で算出された操舵変化パワーが覚醒度低下判定しきい値を超えたときに、ドライバの覚醒度が低下していると判定する。ここで、判定しきい値決定部12では、カーブR算出部12で算出されたカーブRに基づいて覚醒度低下判定しきい値を決定する。覚醒度低下判定部14は、判定しきい値決定部13で決定された覚醒度低下判定しきい値と操舵変化パワーとを比較することにより、ドライバの覚醒度低下判定を行う。
(もっと読む)
情報提示装置および情報提示方法
【課題】運転者の運転負荷に応じて、情報を運転者に適切に提示できる情報提示装置を提供する。
【解決手段】自車両の車両状態及び/又は道路状況に基づいて、運転者の運転負荷を推定する推定手段と、推定した運転者の推定運転負荷に基づいて、運転者に提示する提示情報の提示時間の長さ、および運転者に提示する提示情報の提示時間の開始タイミングを含む前記提示情報の提示態様を決定する提示態様決定手段と、提示態様決定手段により決定された提示態様で、提示情報を運転者に対して提示する提示手段500と、を備える情報提示装置であって、提示態様決定手段は、提示情報を提示している際に、推定した運転者の推定運転負荷が所定値以上となった場合に、提示情報の運転者への提示時間の長さを延長するように提示情報の提示態様を変更することを特徴とする情報提示装置。
(もっと読む)
注意喚起情報提示装置
【課題】注意喚起が必要な場合に的確な注意喚起情報を提示する。
【解決手段】探索された経路上にある交差点に対応する交差点ノードデータのうち、属性情報として遮蔽物情報が付与されている交差点ノードデータについて抽出する。そして、地点決定部は、抽出されたそれぞれの交差点ノードデータについて、運転手の視点の高さとの関係において、視界が遮られる交差点であるか否かを判定する。視界が遮られる交差点である場合には、当該交差点に車両が接近した場合に、視界が悪い旨のメッセージをディスプレイに表示する。
(もっと読む)
情報提示装置および情報提示方法
【課題】運転者の運転負荷に応じて、情報を運転者に適切に提示できる情報提示装置を提供する。
【解決手段】運転者の運転負荷を推定する推定手段と、複数の構成情報からなる提示情報を取得する取得手段と、推定した運転者の運転負荷に基づいて提示情報の提示態様を決定する提示態様決定手段と、提示情報を運転者に対して提示する提示手段500と、運転者の運転負荷に応じた優先度を設定する優先度設定手段と、を備える、提示態様決定手段は、推定した運転者の運転負荷が所定値以上の場合には、推定した運転負荷に応じた優先度に基づいて、運転者に提示する構成情報の量を少なく設定し、また、提示情報を提示している際に、推定した運転者の運転負荷が所定値未満に変化した場合、変化後の運転者の運転負荷に応じた優先度に基づいて、運転者に提示する構成情報の量を増加するように提示態様を変更する。
(もっと読む)
運転支援装置
【課題】本発明は、道路線形情報に基づいて運転支援の内容を変更することで、状況に応じた適切な運転支援を実現することができる運転支援装置を提供する。
【解決手段】本発明は、交差点において、信号機の信号サイクルに関する信号機情報に基づき車両の運転支援を行なう運転支援装置1であって、光ビーコンV1,V2との路車間通信によって信号機情報を受信する路車間通信部2と、交差点への進入路以外の道路線形情報を取得すると共に、道路線形情報に基づいて、運転支援の内容を変更するECU10と、を備える。この運転支援装置1によれば、交差点への進入路以外の道路線形情報に基づいて運転支援の内容を変更するので、例えば交差点の信号機が赤信号状態であっても交差点の直前に脇道が存在する場合には強制的に車両を停止させるような運転支援を行わない等により、状況に応じた適切な運転支援を実現することが可能となる。
(もっと読む)
避退指示装置
【課題】 従来、航空機等の移動体に対して、目標物や目標物に向けて発射される飛しょう体からの避退を指示する場合、オペレータの判断により手動で避退指示を与えていたため、指示タイミングが遅れる、また最適な避退針路でない恐れがあった。
【解決手段】 飛しょう体情報記憶部より読み込む飛しょう体の発射位置及び発射速度と目標情報記憶部より読み込む目標の位置と速度と針路とに基づき飛しょう体を目標に会合させる針路を算出する飛しょう体針路算出部と、目標の針路及び求めた飛しょう体の針路と移動体情報記憶部より読み込む移動体の位置とに基づき避退する移動体を判定する避退対象判定部と、避退対象の移動体の位置及び速度と飛しょう体の針路及び目標の針路とに基づき移動体の避退針路を算出する避退針路算出部と、避退針路算出部より出力される避退針路を移動体に指示する避退指示部と、を備える避退指示装置である。
(もっと読む)
運転支援装置
【課題】車両に搭載した装置によって信号機が黄色表示になる時間を取得することができ、その情報を用いることでジレンマゾーン問題に対処できる運転支援装置を提供する。
【解決手段】車両に装備されたカメラで車両前方の画像を撮影して(S30)、画像認識処理を実行し(S40)、画像内の歩行者用信号機が赤信号に変化したことが検出されたら(S70:YES)、車両用信号が黄信号に変わる予想時間を算出し(S80)、さらに車両が交差点の停止線に到達する予想時間を算出し(S100)、両予想時間の比較から、車両用信号機が青信号であるうちに車両が停止線に到達できるか否かを判定する(S110)。青信号であるうちに停止線まで到達できない場合には、運転者にその情報を報知する(S120)。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】自車両の前方にある道路区間における走行予想軌跡を、より実際の走行軌跡に近い走行予想軌跡として導出することができる技術を提供する。
【解決手段】自車両の周囲を走行する他車両の位置および車速を含む他車両情報を取得し、前記自車両の前方における道路の形状を示す道路形状情報を取得し、前記道路形状情報に基づいて前記道路に所定形状の区間が含まれるか否かを判定し、前記所定形状の区間が含まれる場合に、前記自車両の走行予想軌跡を取得し、前記自車両の走行予想軌跡が前記自車両の走行車線に隣接する隣接車線に最接近する最接近位置における前記自車両と前記他車両との接近度を前記他車両情報に基づいて推定し、前記接近度に応じた運転支援を行う。
(もっと読む)
交通情報提供システム及び交通情報通信装置
【課題】交通安全に寄与する交通情報を提供する交通情報システムを提供すること。
【解決手段】本発明に係る交通情報提供システム1は、走行位置情報取得部12で取得された自車10の位置情報と渋滞イライラ状態判定部14によって取得された自車のドライバーの心理状態情報(イライラ度)とが、路車間通信機16によって他車Cに転送され、他車Cのドライバーへの情報提供部18が、その情報を交通情報として他車Cのドライバーに報知する。このシステム1によれば、他車Cのドライバーは、少なくとも自車10のドライバーの位置と心理状態を知ることができるため、危険な事態を未然に回避でき、交通の安全が図られる。
(もっと読む)
走行支援装置
【課題】 右折車両が右折するまで支援が可能な走行支援装置を提供すること。
【解決手段】 周囲の車両から位置情報及び車速情報を受信する車車間通信装置23と、位置情報から右折レーンを走行する先行車両70を特定し、先行車両70の車速情報を監視する情報処理手段24と、車速情報の推移から先行車両70の右折が検出された時の位置情報を右折ポイントに特定する右折位置特定手段24と、右折ポイントまで、自車両の右折を支援する右折支援手段26と、を有することを特徴とする走行支援装置100を提供する。
(もっと読む)
事故予測通知装置、事故予測通知システム及び車載器
【課題】例えば、交差点左折時の通行者の巻き込み事故等にも対応し、また、過去の通行者及び車両の通行経路履歴を考慮し事故の発生し得るエリアを予測する事故予測通知装置、事故予測通知システム及び車載器を提供することを目的とする。
【解決手段】交差点への進入車両が指定ポイントA1に到達したとき、前記進入車両の指定ポイントA1到達時の交差点付近の通行者情報、信号機5の信号灯情報及び記憶部37に記憶された学習エリアマップに基づいて事故発生予測エリアを予測し、車載器61に事故発生予測エリアマップとして送信する。車載器61は受信した事故発生予測エリアマップを車載器61の有する液晶表示パネルなどに表示することにより車載器61を搭載する車両6に対して通知を行う。
(もっと読む)
物体検出装置
【課題】路側物近傍を走行する車両の位置を正確に検出する。
【解決手段】物体検出装置1は、車両に搭載され、レーダセンサからなる第1センサ24とは相違するセンサである第2センサ21〜23を介して、該車両の周囲に存在する物体を検出する路側物検出部11と、路側物検出部11によって路側物が検出されているか否かを判定する判定部12と、判定部12によって路側物が検出されていると判定された場合に、第2センサ21〜23を介して、前記路側物の位置情報を取得する位置取得部13と、位置取得部13によって取得された前記路側物の位置情報に基づいて、第1センサ24を介して、前記路側物の近傍を走行する他の車両を検出する車両検出部14と、を備える。
(もっと読む)
運転支援装置
【課題】他車両のドライバ走行特性を考慮した運転支援を行うことができる運転支援装置を提供する。
【解決手段】運転支援装置1は、車車間通信装置3、情報提供支援ユニット5、注意喚起支援ユニット6及びECU7を備えている。この運転支援装置1では、車車間通信装置3にて他車両ドライバ走行特性に関する情報が受信される。そして、ECU7において、他車両ドライバ走行情報に基づいて、実行する運転支援の態様が情報提供支援ユニット5と注意喚起支援ユニット6との間で変更される。よって、他車両ドライバ走行特性を考慮した運転支援を実行することが可能となる。
(もっと読む)
運転操作支援装置、自動車及び運転操作支援方法
【課題】運転者に対する警報をより適切に行うこと。
【解決手段】警報対象の位置と、自車両の走行位置とに基づいて、警報対象に対する自車両の接近度合いを検出する接近度合い検出手段と、接近度合い検出手段が検出した接近度合いが予め定めた第1の判定基準値以下となった場合に警報を発生する第1の警報手段と、接近度合い検出手段によって検出した接近度合いが、第1の判定基準値より小さい第2の判定基準値以下となった場合に警報を発生する第2の警報手段と、第1の警報手段における警報を許可するか否かを設定する警報設定手段と、警報設定手段において、第1の警報手段における警報を許可しない設定となっている場合に、第2の判定基準値を第1の判定基準値に近づける補正を行う判定基準補正手段とを有する運転操作支援装置である。
(もっと読む)
運転支援装置
【課題】 信号機付近における余計な制動制御や警報等を抑制し、もってドライバに与える煩わしさを軽減することができる車両の運転支援装置を提供する。
【解決手段】 運転支援ECU1は、車両用信号機に並設された歩行者信号機に関する歩行者信号状態に基づいて、運転支援の態様を調整する。たとえば、車両用信号機における点灯色が青である場合、車両用信号機に並設された歩行者信号機が青または赤である場合には、警報装置4による警報を行う通常のサービスを行う。また、車両用信号機に並設された歩行者信号機が点滅状態にある場合には、ドライバのドライバ特性に応じて運転支援の態様を調整する。ドライバ特性が安全に停止するドライバであれば、警報装置4による警報を中止する。ドライバ特性が安全に停止しないドライバであれば、警報装置4による警報を行う。
(もっと読む)
ロール角補正方法及び装置
【課題】車載カメラ補助装置付き運転者支援システムを作動する際のロール角を補正する方法及び装置を提供する。
【解決手段】カメラは第一の画像32を撮像し、少なくとも2つの特徴点30の座標が決定される。カメラを用いて第二の画像が撮像され、2つの特徴点30の座標が決定される。第一及び第二の画像の特徴点30に依存して2つの実際の変位ベクトル(IV_1、IV_3)が決定される。第一の画像の特徴点の決定された座標に依存し且つ車速に依存して2つのモデル変位ベクトル(MV_N)が決定され、それぞれ2つのモデル変位ベクトルは、画像平面における第一の画像から第二の画像への特徴点の変位をモデル化する。決定された実際の変位ベクトル(IV_1、IV_3)及びモデル変位ベクトル(MV_N)に依存して基準ベクトルが決定される。そしてロール角(α)は基準ベクトルによって決定される。
(もっと読む)
車両用衝突回避支援装置
【課題】歩行者を含む移動体(移動障害物)との衝突の危険度をより正確に予測し、過度に危険度を高く評価して運転者を過度に煩わせることのない車両用衝突回避支援装置を提供する。
【解決手段】車両用衝突回避支援装置は、車両の周辺に存在する移動体を検出する移動体検出手段と、当該車両周辺の歩道境界物の位置、形状を検出する歩道境界検出手段と、移動体検出手段によって検出した移動体が、当該車両と衝突する危険度を評価する危険度評価手段と、危険度評価手段によって評価した衝突の危険度に基づき、当該車両の運転者へ注意喚起を行う警告手段とを備え、少なくとも、移動体の位置情報と歩道境界物の位置情報とからその周囲の状況をも考慮して、移動体検出手段が検出した移動体と当該車両との衝突の危険度を評価する。
(もっと読む)
81 - 100 / 581
[ Back to top ]