
Fターム[5H180LL06]の内容
Fターム[5H180LL06]の下位に属するFターム
音による警報であるもの (2,307)
音以外の警報であるもの (2,573)
Fターム[5H180LL06]に分類される特許
121 - 140 / 581
道路交通情報提供システム及び方法
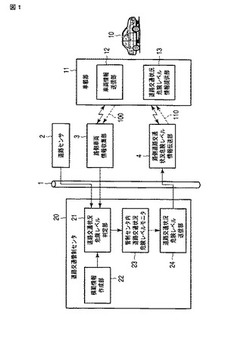
【課題】リアルタイムの道路交通状況を考慮した事故危険性などを判断するための危険情報を提供できる道路交通情報提供システムを提供することにある。
【解決手段】リアルタイムの道路交通状況を考慮した危険レベルを判定し、この判定結果に基づいた危険情報を提供する道路交通情報提供システムである。道路交通管制センタ20は、道路センサ2から送信される道路交通状況情報及び路側車両情報収集部3から収集された車両挙動情報を受信し、模範運転情報との比較に基づいて道路交通状況の危険レベル情報を作成して、自動車10の運転者に提供する。
(もっと読む)
顔向き検出装置

【課題】運転者の顔の向きを正確に検出する。
【解決手段】顔向き検出装置は、車両の運転者の顔向きを検出する。顔向き検出手段は、判断処理手段と、推測手段と、学習手段とを備えている。判断処理手段は、運転者を撮影する撮影手段によって撮影された画像を用いて当該運転者の顔向きを判断する判断処理を行う。推測手段は、運転者の運転状態に基づいて、運転者が正面を向いているか否かを推測する。学習手段は、運転者が正面を向いていると推測される場合に撮影手段によって撮影された画像から検出される顔向きが正面の向きであると判断されるように判断処理に関して学習を行う。
(もっと読む)
車両用距離画像データ生成装置
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置を提供すること。
【解決手段】 投光器5は、異なる配光角度のレンズ51〜53を備えた複数の近赤外線LED5aを備えて配光角度に合わせて点灯、消灯を行うようにし、タイミングコントローラ9は、ターゲット距離に基づいて、投光器5の異なる配光角度のレンズ51〜53を備えた複数の近赤外線LED5aの点灯、消灯により、ステップS11〜S16の処理で、配光角度を変更させた。
(もっと読む)
車両用距離画像データ生成装置
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置を提供すること。
【解決手段】 投光器5と、イメージインテンシファイア7b及び高速度カメラ8と、タイミングコントローラ9と、イメージインテンシファイア7b及び高速度カメラ8により得られたターゲット距離の異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10を備え、画像処理部10は、ターゲット距離の異なる複数の撮像画像それぞれに対して輝度と頻度から物体以外のデータを距離画像データの生成から除外するステップS4〜S6の処理を備えた。
(もっと読む)
運転意図推定装置、車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】ドライバの運転意図を精度よく推定し、ドライバの意図に合った反力制御を行う車両用運転操作補助装置を提供する。
【解決手段】車両用運転操作補助装置は、自車両周囲のリスクポテンシャルを算出し、リスクポテンシャルに基づいてアクセルペダルに発生させる操作反力の指令値を算出する。そして、運転意図推定装置において推定した実際のドライバの運転意図と推定した運転意図状態に基づいて、反力指令値を補正する。実際のドライバの運転意図が車線変更であると推定される場合は、ドライバが車線変更を想起してからの経過時間に基づいてアクセルペダル反力指令値を減衰する。
(もっと読む)
情報提供装置、情報提供方法、プログラムおよび情報提供システム
【課題】 車両運転中のユーザの複数のワークロードを考慮した適切な情報提供を行うことのできる情報提供装置を提供する。
【解決手段】 情報提供装置1は、車両の運転に関連する複数の異なるワークロードごとに、車両運転中のユーザの寄与行動からワークロード値を算出するための定量化モデルが予め記憶されているモデルDB2を備えている。この情報提供装置1は、複数のワークロードごとに、車両運転中のユーザから寄与行動に関するデータを取得し、定量化モデルを用いて、車両運転中のユーザの寄与行動のデータからユーザのワークロード値を推定する。そして、複数のワークロードごとに推定されたワークロード値に応じて、車両運転中のユーザに対する情報提供の制御が行われる。
(もっと読む)
走行支援装置
【課題】交通流の円滑化を図ることができる走行支援装置を提供する。
【解決手段】走行支援装置1は、設定車速受信部2、ミリ波レーダ3、クルーズレバー4、車速センサ5、ECU6、エンジン制御部7、ブレーキ制御部8、表示部9、設定車速送信部10を備えている。走行支援装置1では、ECU6によって自車両と先行車両との車間距離が所定の距離以上であり、自車両の設定車速よりも後続車両の設定車速が高い場合に、表示部9によって運転者に後続車両の設定車速が自車両の設定車速よりも高いことが報知される。更に、報知を行ってから所定時間が経過した後に、エンジン制御部7、ブレーキ制御部8によって自車両の設定車速が後続車両の設定車速に変更される。
(もっと読む)
運行管理システム
【課題】安全に走行できる運行管理システムの提供。
【解決手段】自車1のカーナビゲーション5からの情報に基づく操作指令を含む走行状態に関する情報であって自車の挙動を予測可能な事前情報を、無線により、自車の識別情報と共に他車および/または集中管理システムに提供し、他車の事前情報を取得する事前情報交換システム13と、他車の事前情報に基づき操作指令を生成する制御手段であって、他車の予測される挙動を回避する動作を行わせる制御システム12とを有する運行管理システム10を提供する。
(もっと読む)
車両の事故防止システム、コンピュータプログラム、車両の事故防止制御方法、及び電源制御装置
【課題】接近車両を精度良く検出する。
【解決手段】無線通信を行うための無線通信部2が搭載された車両の事故防止システム1であって、事故警戒を行う車載コンピュータ4を備えている。車載コンピュータ4は、車両のエンジンが停止すると車両のドアが開く可能性があると判定する判定部41、及び、他の車両に搭載された無線通信部との通信を前記無線通信部2に行わせて、他の車両の位置情報を取得し、前記車両に接近している接近車両を検出する接近車両検出部43aとして機能する。車載コンピュータ4は、ドアが開く可能性がある状態で接近車両を検出すると、ドアをロックしてドアが開かないようにする。
(もっと読む)
覚醒度判定装置
【課題】覚醒度の誤判定を防止して判定精度の向上を図った覚醒度判定装置を提供する。
【解決手段】車両の周辺環境に関する情報である周辺環境情報を取得し、取得された周辺環境情報に基づいて、覚醒度判定の基準となるまぶたの基準開度を補正する。このように、車両の周辺環境に応じて基準開度を補正することで、運転者が注視して、覚醒度が高いにも関わらず目を細めている場合に、運転者の覚醒度が低いと誤判定することが防止される。
(もっと読む)
航空機進入滑走路監視システムおよび航空機進入滑走路監視方法
【課題】着陸進入中の航空機の滑走路への誤進入や指定地点への着陸の困難を自動的に検知して管制官に警告を発する航空機進入滑走路監視システムを提供する。
【解決手段】レーダ管制装置100として、レーダシステム200からの航空機の位置情報に基づいて当該航空機の追尾を行う追尾処理部101、航空機の飛行計画情報を登録管理する飛行計画情報管理処理部102、航空機の位置情報と飛行計画情報との関連付けを行う識別処理部103、航空機の着陸経路を予測し、指定した着陸滑走路への進入や指定した着陸地点への着陸の可否を監視する着陸経路監視処理部104、誤進入や着陸困難な旨の警告表示や管制官からの指示の入力等を行うレーダ表示処理部105を少なくとも備えることにより、着陸経路監視処理部104にて、航空機の誤進入や着陸困難を検出した場合、レーダ表示処理部105にその旨の警告表示を行い、管制官に対して警告を発する。
(もっと読む)
意識低下検出方法及びシステム、居眠り運転防止方法及びシステム、並びにプログラム
【課題】振動の大きい産業用車両や産業機械の運転操作時においても、作業者の意識低下を確実に検出できるようにする。
【解決手段】運転座席1の座面3と背面2との境界部4に設けられた圧力検出手段10により検出された加圧力に対して所定時間の移動平均処理を行い、その移動平均処理により算出された加圧力に応じて閾値を設定し、圧力検出手段10により検出される加圧力が前記閾値以上である場合に作業者の意識が低下していると判定して、意識低下信号を出力する。
(もっと読む)
ナビゲーション装置および車両の走行安全装置
【課題】道路の分岐点において適切なマップマッチングをおこない、適切に安全装置を作動させる。
【解決手段】ナビゲーション装置13は、現在位置検出部21から出力される位置信号に基づいて地図データ記憶部23の道路データのうち自車両が存在する走行路を判定するナビゲーション処理部22と、撮影装置16から出力される画像データに基づいて道路の走行区分線を認識する道路形状認識部65とを備え、ナビゲーション処理部22は、道路形状認識部65により認識された走行区分線に基づいて、自車両が分岐点を通過する前後において同一の道路を継続して走行しているか否かを判定し、同一の道路を継続して走行していると判定した場合に、自車両が存在する走行路を、この時点までに判定した走行路から分岐点に接続された他の走行路へと変更することを禁止する。
(もっと読む)
運転支援装置、運転支援制御方法および運転支援制御処理プログラム
【課題】自車両の走行に影響を与える恐れがある障害物に搭載された各種センサの情報を取得して、運転支援制御に活用することを課題とする。
【解決手段】運転支援装置は、車両前方の対向車両および対向車両側に存在する歩行者が画像認識結果として得られた場合には、画像認識結果として得られた対向車両からセンサ搭載情報を取得するセンサ搭載情報取得処理を実行する。センサ搭載情報取得処理の完了後、運転支援装置は、対向車両との間の危険度を設定する危険度設定処理を実行する。具体的には、センサ搭載情報取得時の環境およびセンサ種別で決定される環境条件、センサ搭載情報取得時の自車両と対向車両との間の状況およびセンサ種別で決定される状況条件に応じて、対向車両との間の危険度を設定する。
(もっと読む)
運転支援装置
【課題】特定の進路にのみ進行可能な時間を有する交差点にて停止支援を行う場合において、停止支援による煩わしさを低減すると共に、車両を停止線で確実に停止可能とする。
【解決手段】運転支援装置1は、警報装置4、ブレーキアシスト装置5及びECU6を備えている。この運転支援装置1では、信号機に矢灯器が設けられている交差点で警報出力を行う場合、右折行動待機位置に停止可能な第1警報タイミングを警報条件として設定する。つまり、警報出力の開始タイミングを、停止線に停止可能な第2警報タイミングよりも遅らせている。よって、矢灯器方路に進行する自車両10においては停止支援による煩わしさが低減される。加えて、ブレーキアシスト装置5を備えていることから、停止線で停止する自車両10は、BAによって停止線で確実に停止可能となる。
(もっと読む)
車両制御装置及び車両制御システム
【課題】衝突する各車両において被害低減効果を向上できる車両制御装置及び車両制御システムを提供する。
【解決手段】車両制御装置1では、自車両10と他車両との衝突パターンを推定すると共に、他車両で作動可能な衝突対応デバイス3に関する「デバイス制御要求フラグ」を受信する。続いて、衝突パターン及び「デバイス制御要求フラグ」に応じて、自車両10及び他車両で作動させる衝突対応デバイス3のそれぞれを決定する。そして、自車両10において、決定した衝突対応デバイス3を作動させるよう制御すると共に、他車両に対して、決定した衝突対応デバイスを作動させるよう要求する。すなわち、自車両10で作動させる衝突対応デバイス3と他車両で作動させる衝突対応デバイスとの双方が、自車両10と他車両との衝突形態に応じて決定されることとなる。よって、各車両にとって最適な衝突被害低減を実現できる。
(もっと読む)
運転支援装置
【課題】周囲環境に応じた安全性の高い運転を促しつつ、停止位置で車両を確実に停止させることができる運転支援装置を提供する。
【解決手段】運転支援装置1では、自車両10の車速が制限速度以下の場合、警報条件として通常の第1条件が適用され、この第1条件下で停止支援が実行される。自車両10の車速が制限速度を超えている場合、警報条件として第1条件よりも厳しい第2条件が適用され、この第2条件下で停止支援が実行される。よって、自車両10の車速が制限速度を超えている場合、第2条件K2下で停止支援が実行され、制限速度を遵守させるような運転が促されつつ停止位置で車両が停止されることとなる。
(もっと読む)
運転支援装置
【課題】運転者に掛かる運転負荷の低減と、運転者による運転の自由度の確保とを両立させることができる運転支援装置を提供する。
【解決手段】自車両の運転支援に際し、自車両が毎日通る通勤ルートのような走行頻度の高い走行ルートを走行する際には、ステップS15で完全自動運転レベルに近い高レベルの運転支援が実行されるため、運転者に掛かる運転負荷が低減される。一方、自車両が行楽や買い物などの目的でたまに訪れた街などを走行する場合のような走行頻度の低い走行ルートを走行する際には、ステップS16で手動運転レベルに近い低レベルの運転支援が実行されるため、運転者による運転の自由度が確保される。従って、運転者に掛かる運転負荷の低減と、運転者による運転の自由度の確保とが両立する。
(もっと読む)
車両周辺監視装置
【課題】車両と対象物との接触可能性が高い状況にあることを、この対象物の種類に鑑みて適当なタイミングまたは頻度で通報することができる車両周辺監視装置を提供する。
【解決手段】本発明の車両周辺監視装置によれば、対象物が人間であると判定され、かつ、この対象物の実空間位置が第1の接触判定領域A1に含まれている場合、自車両10とこの対象物との接触可能性が高いことが通報される。一方、対象物が四足動物であると判定され、かつ、この対象物の実空間位置が第2の接触判定領域A2に含まれている場合、当該通報がなされる。ここで、第2の接触判定領域A2は、第1の接触判定領域A1との重なり領域と、第1の接触判定領域A1から少なくとも一部がはみ出した領域とを有している。
(もっと読む)
車両の運転支援装置
【課題】ドライバ固有の運転特性を考慮し、個々のドライバに見合った自然で違和感が無く、且つ必要充分な運転支援を与える。
【解決手段】カーブ曲率分散値演算部5aで演算したカーブ曲率分散値Veとハンドル角分散値演算部5bで演算したハンドル角分散値Vθとの相関関係からドライバ固有の特性係数Kvを特性係数演算部5cで演算し、この特性係数Kvに基づいて障害物に対する回避操作を開始するまでのドライバ固有の操作余裕時間Trをドライバ操作余裕時間設定部6で設定する。そして、警報判断部8において、ドライバ固有の操作余裕時間Trと回避操作余裕時間演算部7で演算した車両制御システムの回避操作余裕時間Tcとを比較し、Tc<Trのとき、警報装置9に信号を出力し、ドライバに警報を与える。これにより、運転支援装置1は、個々のドライバに見合った自然で違和感の無い、必要充分な運転支援とすることができる。
(もっと読む)
121 - 140 / 581
[ Back to top ]