
Fターム[5H180LL06]の内容
Fターム[5H180LL06]の下位に属するFターム
音による警報であるもの (2,307)
音以外の警報であるもの (2,573)
Fターム[5H180LL06]に分類される特許
161 - 180 / 581
駐車空間監視装置
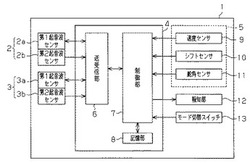
【課題】より高精度に駐車空間を算出することができる駐車空間監視装置を提供する。
【解決手段】駐車空間監視装置は、超音波センサ2,3を通じて車両1周辺の障害物と車両1との相対距離及び相対角度から車両1に対する障害物の相対位置を検知する。車両用障害物監視装置は、超音波センサ2,3が検知した障害物の各相対位置情報を各検知時の車両1の移動情報と関連付けて記憶する記憶部8に記憶された各相対位置情報から駐車空間を算出する。
(もっと読む)
通信システム及び車載通信装置

【課題】同一の通信周波数帯域を利用した車車間通信及び路車間通信を安価に行う。
【解決手段】車載通信装置2は、車載通信装置2が搭載されている車両1が基地局3側に設けられた車車間通信装置4の通信圏内に入り、路車間通信装置5の位置情報を受信した場合、車車間通信から路車間通信へと通信を切り換える。そして車載通信装置2は、基地局3側に設けられた路車間通信装置5の通信圏内に入ったタイミングで路車間通信装置5と路車間通信を行う。
(もっと読む)
認識システム
【課題】他の通信装置から送信されてくる位置情報の精度を高めることができる認識システムの提供。
【解決手段】前方車両情報とインフラ情報とを照合し(S210〜S230)、同一の車両とみなせる情報について、位置及び速度の情報の平均を取ってその車両の情報とする(S260、S265)。また、一体の車両の情報とみなせる情報を探して(S270)、それを一体化する(S275)。さらに走行情報を用いることで未来の速度及び位置の推定値を補正する(S2800)。そして、自車線確率の計算(S290)、及び、衝突時間の計算(S293)を行い、衝突の危険がある車両に向けて自車両の情報を送信する(S295)。
(もっと読む)
物体検出装置
【課題】画像の背景と物体とを容易に分離して検出することができる物体検出装置を提供する。
【解決手段】車両4周辺を繰り返し撮像した画像に基づいて物体を検出する物体検出装置1であって、画像から物体候補の移動量を取得する移動量取得部22と、移動量の大きさが所定値以上の場合には、物体候補を物体として検出する物体検出部24とを備えることで、車両4から遠い地点に存在する物体候補(背景)、及び、車両4に近い地点に存在する物体候補(物体)のオプティカルフローをそれぞれ取得し、取得したオプティカルフローの大きさが所定値以上の場合には物体として検出する。
(もっと読む)
車両認識装置、車両、及び車両認識用プログラム
【課題】周辺に複数の車両が存在する場合でも、画像に撮像された複数の車両を区別して、車両を適切に認識することができる車両認識装置、車両、及び車両認識用プログラムを提供する。
【解決手段】車両認識装置10は、撮像手段2を介して取得された画像から、画素値が所定範囲となる画素からなる領域を特徴領域として抽出する特徴領域抽出手段12と、抽出された特徴領域のうち、画像上で水平方向に並んでいる第1及び第2の特徴領域を特定するペアリング手段13と、第1の特徴領域の上下又は第2の特徴領域方向の周辺域で第1の判定領域を設定すると共に、第1及び第2の特徴領域の中心線に対して第1の判定領域と線対称の位置に第2の判定領域を設定する判定領域設定手段14と、第1及び第2の判定領域との相関の度合が高い場合に、第1及び第2の特徴領域が1台の他の車両の画像部分であると判定する特徴領域判定手段15とを備える。
(もっと読む)
運転状態警告システム、運転状態警告方法及びプログラム
【課題】運転者が眠気を催したときに、運転者に対して適正なタイミングで警告を行うことができるようにする。
【解決手段】運転者の生理情報を取得する生理情報取得処理手段と、前記生理情報に基づいて、運転者の覚醒状態からの状態の変化の度合いを表す状態変化指標を算出する状態変化指標算出処理手段と、前記状態変化指標に応じて、異なるタイミングで運転者に対して警告を行う警告処理手段とを有する。運転者の覚醒状態からの状態の変化の度合いを表す状態変化指標に応じて、異なるタイミングで運転者に対して警告が行われるので、運転者が眠気を催したときに運転者に対して適正なタイミングで警告が行われる。
(もっと読む)
車両の障害物検知装置
【課題】車両が障害物と衝突しそうか否かを迅速に判定し且つ障害物検知装置による作動機器の誤作動を抑えつつ、車両が走行車線から逸脱した際の安全性を向上させる。
【解決手段】障害物を検知するレーダ装置1と、レーダ装置1から情報を受けて作動機器7,9,11を制御するコントロールユニット5とを備えた障害物検知装置である。障害物が走行車線内に位置しているか否かを判定する障害物位置判定部5cと、走行車線からの車両の逸脱を予知する逸脱予知部5fと、車両と障害物との衝突を予知する衝突予知判定を行う衝突予知判定部5dとをさらに備えている。衝突予知判定部5dは、障害物位置判定部5cにより障害物が走行車線内に位置していると判定されたときには衝突予知判定を行う一方、障害物が走行車線内に位置していないと判定された場合には、逸脱予知手段5fにより走行車線からの車両の逸脱が予知されたときにのみ衝突予知判定を行う。
(もっと読む)
生体情報生成装置、生体情報管理システム、車両制御装置
【課題】生体情報を生成可能な装置において、使用者一人一人の状況に応じた生体情報を生成すること。
【解決手段】生体情報生成処理では、医療情報を取得し(S130:YES)、その医療情報中の治療予定時刻に基づいて、治療予定時刻の前後の一定時間内での計測間隔が短い間隔となるように計測タイミングを設定する(S140)。そして、計測タイミングとなると、全種類の生体信号を計測して(S170)、それらの計測された生体信号それぞれ、及び血圧、心拍数を生体情報として生成し(S190)、今回の生体情報と前回の生体情報との差分(即ち、生体情報変化量)を算出する(S200)。その算出した生体情報変化量に基づいて、運転者の体調(S220)や治療内容が実行されたか否か(S270)を判定し、生体情報と体調判定結果と治療実行判定結果とを送信情報として医療機関設置装置群60に送信する(S300)。
(もっと読む)
車線位置検知システム
【課題】種々の道路状況・道路環境に応じて自動的に最適な白線検知処理を行うことが可能な車線位置検知システムを提供すること。
【解決手段】本発明に係る車線位置検知システム20は、車載カメラ21で路面を撮像して得られた画像を俯瞰画像に変換し、俯瞰画像の輝度を車両進行方向に平行に積分して進行方向に垂直な方向に対する輝度プロファイルを求め、輝度プロファイルにフィルタ処理を施すことによって白線の位置を検出するシステムである。車線位置検知システム20は、車両に設置されたセンサの情報に基づいて路面状況を判定し、判定された路面状況に基づいて、フィルタ処理に用いられるフィルタの遮断周波数の高低を変更する。
(もっと読む)
飲酒運転防止装置及び飲酒運転要因物質採取方法
【課題】運転者の皮膚から放出した気体に含まれるアルコールの検出精度を向上させることが可能な、飲酒運転防止装置及び飲酒運転要因物質採取方法を提供する。
【解決手段】運転者の皮膚から放出した気体に含まれるアルコールに応じて、運転者の血液中に含まれるアルコールの血中濃度を測定する飲酒運転防止装置であって、運転者が操作するシフトレバー1の内部に内部空間12を形成し、シフトレバー1のうち、シフトレバー1の操作時に運転者の皮膚が接触すると予測した接触予測部位24に、内部空間12と外部空間とを連通させる導入開口部22を形成し、気体に含まれるアルコールを採取するアルコール検出部20を、内部空間12において導入開口部22よりも上方に配置することにより、運転者の体温により昇温して比重が軽くなり、内部空間12を上昇する気体を、アルコール検出部20により検出する。
(もっと読む)
発進情報提供装置および発進情報提供方法
【課題】前方の交通状況に適した発進を行なうことができる発進情報を生成する。
【解決手段】加速度算出部23は各先行車両の加速度を算出し、算出した加速度を各先行車両毎に記憶する。発進判断部24は加速度算出部23により算出、記憶された加速度に基づいて、直近の先行車両が発進したか否かを判断する。交通状況判定部27は記憶された各先行車両の加速度に基づいて前方の交通状況を判定し、交通状況判定情報を生成する。発進タイミング情報生成部28は加速度算出部23が算出、記憶した加速度、交通状況判定部27が生成した交通状況判定情報に基づいて、発進タイミング情報を生成する。要求発進加速度情報生成部29は、加速度算出部23が算出、記憶した加速度、交通状況判定部27が生成した交通状況判定情報に基づいて、要求発進加速度情報を生成する。
(もっと読む)
車両周辺監視装置、車両、車両周辺監視プログラム
【課題】対象物の種類を効率よく判定することができる装置等を提供する。
【解決手段】本発明の車両周辺監視装置10によれば、対象物がそのレーダ距離が指定距離範囲に包含されるという「第1分類要件」を満たしているか否かが判定される。さらに対象物が第1分類要件を満たしていないと判定された履歴がないという「第2分類要件」を満たしているか否かが判定される。そして、第1分類要件および第2分類要件が満たされている対象物が指定距離範囲に対応する第1指定区分に分類される。
(もっと読む)
車両用運行記録評価装置
【課題】運転者以外の管理者等が各運転者の走行中における危険運転状態を客観的にかつ容易に把握して、運転評価の際の労力を低減することできる車両用運行記録評価装置を提供する。
【解決手段】運転中に運転状態評価部27の監視により得られる運転状況情報が時系列にデジタルタコグラフ30により保存されると共に、この運転状況情報に基づいて運転状態評価部27により危険運転状態と判定されるときにトリガー信号SG5が出力される。そして、このトリガー信号SG5に基づいてデジタルタコグラフ30により、危険運転状態が発生じた時点の運転状況情報に印(フラグ)が付されて記録されることになる。このため、運転者以外の管理者等が、運転状況情報をフラグと合わせて確認することにより、該当する運転者が安全運転をおこなっているかを客観的且つ容易に判断することができる。
(もっと読む)
車両周辺監視装置、車両、車両周辺監視プログラム
【課題】対象物の種類を高精度で判定することができる装置等を提供する。
【解決するための手段】本発明の車両周辺監視装置10によれば、異なる2つの時刻(=第1時点および第2時点)のそれぞれにおける車両1の周辺状況を表わす画像において設定された、同一の対象物が存在する対象物領域(=第1対象物領域)のサイズが、当該異なる2つの時刻のそれぞれにおける車両1からこの対象物までの距離に基づいて揃えられる。また、第2対象物領域(=拡大または縮小された第2時点における第1対象物領域)において、第1時点における第1対象物領域に配置された第1局所領域と同一性を有する第2局所領域を包含する領域(=第3対象物領域)の形状に基づいて対象物が分類される。このような同一性を有する局所領域群には、その形状に応じた形状を有する対象物が存在している蓋然性が高いので、対象物の種類が高精度で判定されうる。
(もっと読む)
飲酒検知装置
【課題】精度良く運転者の飲酒を検知することができると共に、飲酒検知時における運転者の負担を低減させることができる飲酒検知装置を提供する。
【解決手段】ステアリングアクチュエータ12によってステアリングホイール16に付与された所定の操舵トルクに対して、運転者が操作した操作量を検出する。飲酒状態の運転者は、飲酒をしているという意識から先行車や周辺の障害物の存在に対して集中するため、外乱に対する反応が低くなる傾向にある。そのため、操舵トルク(外乱)に対する運転者の操作量(反応)を検出し、検出された操作量に基づいて飲酒状態の判定を行うことで、飲酒時の運転者の挙動を確実に捉えることができ、精度良く運転者の飲酒を検知することができる。
(もっと読む)
車両用危険情報処理装置
【課題】必要な危険情報を車両間で共有することが可能な車両用危険情報処理装置を提供すること。
【解決手段】車両状態を検出する車両状態検出手段(10)と、前記車両状態検出手段の検出結果に基づいて、予め定められた複数の危険状態分類に含まれる危険状態に車両が置かれているか否かを判断する危険状態判断手段(62)と、無線通信手段(20)と、前記危険状態判断手段により予め定められた複数の危険状態分類に含まれる危険状態に車両が置かれていると判断された場合に、該車両が置かれていると判断された危険状態に応じた発信範囲で所定の危険情報を車外に発信するように前記無線通信手段を制御する通信制御手段(64)と、を備える車両用危険情報処理装置(1)。
(もっと読む)
警告発生装置
【課題】危険に対する予測に必要な情報が欠落された場合でも予測を行うことを可能とし、さらに車両が走行する環境に応じて適切な警告を発生する警告発生装置を提供する。
【解決手段】車両が走行する種々の場所における複数の項目毎に分けられた走行環境に関する情報を示した環境情報、及び当該環境情報に対応するとともに、当該環境における危険度を示す危険度情報を含む環境危険度情報が記録され、記録された環境危険度情報に基づき、一部の項目に対応する情報が確定した場合に他の項目に対応する情報及び危険度を推論可能な情報である推論情報を生成し、車両の現時点における少なくとも一部の項目に対応する情報である現時点環境情報を取得し、取得された現時点環境情報を、生成された推論情報に適用することにより、危険度を推論し、推論された危険度が所定の閾値を超えた場合に、当該車両を運転する運転者に警告を発生する。
(もっと読む)
運転監視方法および運転監視装置
【課題】乗り物の運転の危険、状態、または異常の予測方法を改善した運転監視方法を提供する。
【解決手段】乗り物の動的パラメータについての訓練データストリームを取得し、衝突の瞬間を示すデータを記録するステップと、訓練データストリーム中の衝突の瞬間を示すデータと重なる訓練データを最も危険であるとラベル付けするステップと、訓練データストリームのうち最も危険であるとしてラベル付けされた訓練データから最も離れている訓練データを最も安全であるとしてラベル付けするステップと、ラベル付けされている訓練データの危険度判定の尺度に対応する情報をラベル付けされていない訓練データに伝搬させるステップと、ラベル付けされている訓練データおよびラベル付けされていない訓練データを用いて危険レベル予測関数のパラメータを推定するステップと、実測データストリームに危険レベル予測関数を適用するステップと、を有する。
(もっと読む)
飛行機械の自動離陸システム
【課題】翼と胴体とを、互いに直交する2軸を中心に回動可能な関節により結合し、前記2軸を中心に各々任意に回動する駆動装置を備えた飛行機械の離陸特性を生かして、離陸距離計算を自動的に行い、離陸の可否判定を自動的に行うことができるようにする。
【解決手段】飛行機械の姿勢制御用2軸関節部分において、翼と胴体とを、互いに直交する2軸を中心に各駆動装置によって回動可能に結合する。この飛行機械では一定の迎角に制御した状態で離陸可能であるので、この飛行機械において予め得られている離陸特性データにより、翼の迎角を該飛行機械の最短離陸距離に設定したときの離陸障害範囲内に障害物が存在するか否かを判別する。このとき離陸不能と判別した場合には離陸不能信号を出力して離陸を行わせないと共に、離陸可能の時には適切な翼迎角と速度に設定して、安全な離陸を行わせる。
(もっと読む)
交通流シミュレーションシステム
【課題】運転支援装置に対するドライバの反応を考慮して交通流をシミュレーションする。
【解決手段】交通流シミュレーションシステムは、仮想空間に模擬交通環境を設定する模擬交通環境設定装置10と、前記仮想空間上の各模擬車両にそれぞれ運転支援を行う運転支援装置シミュレーション装置20と、運転支援装置シミュレーション装置20により運転支援される模擬車両毎に、運転支援装置シミュレーション装置20の特性と前記模擬車両を運転する運転者の特性とに基づいて前記車両を運転するドライバの反応についての条件付き確率を求め、前記条件付き確率を用いて前記ドライバの反応を設定するドライバ反応設定装置30と、模擬交通環境設定装置10により設定された模擬交通環境と、ドライバ反応設定装置30により設定されたドライバの反応と、に基づいて、模擬車両の動きをシミュレーションする交通流シミュレーション装置40と、を備えている。
(もっと読む)
161 - 180 / 581
[ Back to top ]