
Fターム[5H180LL06]の内容
Fターム[5H180LL06]の下位に属するFターム
音による警報であるもの (2,307)
音以外の警報であるもの (2,573)
Fターム[5H180LL06]に分類される特許
1 - 20 / 581
車両接近報知システム
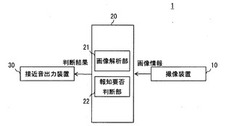
【課題】車両の接近をより適切に報知することのできる車両接近報知システムを提供する。
【解決手段】制御装置20は、撮像装置10から入力された画像情報に基づいて歩行者の有無及び顔の向きを検出し、歩行者を検出できたが歩行者の顔を検出できなかったことに基づいて車両の接近を報知する必要があると判断する。また、制御装置20は、当該制御装置20に接続された接近音出力装置30に対し、車両の接近を報知する必要の有無についての判断結果を出力し、接近音出力装置30は、車両の接近を報知する必要があるとの判断結果が入力された場合には車両接近音を出力する一方、車両の接近を報知する必要がないとの判断結果が入力された場合には車両接近音を出力しない。
(もっと読む)
車両姿勢角算出装置及びそれを用いた車線逸脱警報システム

【課題】車両ピッチ角が変化する状況下においても、道路消失点の情報を使わずに安定して車線に対する車両のヨー角を求めることのできる車両姿勢角算出装置を提供する。
【解決手段】車載用撮像装置から取り込んだ車外を撮像した画像情報から区画線を検出する区画線検出部と、区画線と車載用撮像装置の光軸間の距離を所定の処理周期毎に算出する距離算出部と、算出された区画線と車載用撮像装置の光軸間の距離と所定の処理周期の間に車両が進行した車両進行距離に基づいて区画線の角度を算出する車両角度算出部と、を有する車両姿勢角算出装置。
(もっと読む)
安全運転支援システム、車載機、および、車載機に用いるプログラム
【課題】交差点の手前の道路上の特定の停止線を車両が越えると、交差点進入に対する注意喚起のための処理を終了する(サービスアウトする)安全運転支援システムにおいて、ドライバにとって必要な注意喚起の報知を受けられなくなってしまう可能性を低減する。
【解決手段】車両用ナビゲーション装置は、受信した安全運転支援情報に含まれる停止線位置情報に基づいて、光ビーコンから最も近くに位置する最近停止線位置と最も遠くに位置する最遠停止線位置を特定し、車両の現在位置から最近停止線位置までの走行所要時間が規定時間以内になったこと等に基づいて、車両4のドライバに、赤信号警報のための報知を行い(ステップ220)、また、待ち時間表示を行うための処理を行う(ステップ230)。そして、車両が最遠停止線を越えたことに基づいて、サービスアウトして待ち時間表示を行うための処理を終了する。
(もっと読む)
電磁波検知装置、携帯機器、電気自動車及びハイブリッド車の判定方法並びにプログラム
【課題】高価なインフラ設備を必要とすることなく、電気自動車及びハイブリッド車の接近を報知することができる電磁波検知装置、携帯機器、電気自動車及びハイブリッド車の判定方法並びにプログラムを提供すること。
【解決手段】電磁波検知装置100は、車両から発生する電磁波を検知するアンテナ/センサ部110、第1の演算処理部120、及び判定部140を備える。周波数解析部123は、アンテナ/センサ部110からの出力信号にフィルタ部121で帯域制限し、AD変換部122でアナログ・デジタル変換した信号に対して、電気自動車及びハイブリッド車のモータ又はインバータに起因する特有の周波数成分のスペクトルが含まれることを解析する。判定部140は、第1の演算処理部120の演算処理結果に基づいて、電磁波の発生主体が電気自動車及びハイブリッド車か、それ以外の車両であるかを判定する。
(もっと読む)
車載緊急通報装置
【課題】緊急通報の開始トリガが発生した場合に、緊急通報を速やかに行う。
【解決手段】車載緊急通報装置1は、車両が衝突する可能性があると判定し且つ緊急通報中でないと判定すると、ナビゲーションシステム10からの緊急通報以外の別の用途での無線通信部3に対する無線通信回線の接続要求を受付けない、ナビゲーションシステム10からの接続要求に応じて無線通信部3が緊急通報以外の別の用途で接続している無線通信回線を切断する、緊急通報以外の別の用途での無線通信部3における無線通信回線の接続禁止をナビゲーションシステム10に通知する、ナビゲーションシステム10からの緊急通報以外の別の用途での無線通信部3における無線通信回線の接続帯域を制限する等し、緊急通報を可能となるように緊急通報用の無線リソースを確保する。
(もっと読む)
ふらつき判定装置
【課題】周辺車両の検出範囲を狭めることなく、周辺車両のふらつき判定の精度を高めることが可能なふらつき判定装置を提供する。
【解決手段】本発明の一実施形態に係るふらつき判定装置70は、第1の検出手段20によって検出された周辺車両の第1の位置情報(距離、横位置)を求める第1の演算手段20と、第1の検出手段20と異なる検出原理を用いる第2の検出手段30によって検出された周辺車両の第2の位置情報(距離、横位置)を求める第2の演算手段30と、第1及び第2の位置情報を融合して周辺車両の融合位置情報(距離、横位置)を求める融合演算手段74と、周辺車両の存在位置に基づいて、第1及び第2の位置情報、並びに融合位置情報のうちの何れかを選択する選択手段75と、選択された位置情報(距離、横位置)の時間的変動に基づいて周辺車両のふらつき判定を行う判定手段76とを備える。
(もっと読む)
運転支援装置及び運転支援装置の制御方法
【課題】簡易な構成で、車両の走行状態に応じて、車両の周辺の障害物をリアルタイムに検出する。
【解決手段】撮影方向が異なる複数の撮影部1a、1b、1cを備え、各撮影部1a、1b、1cにより撮影された車両周辺画像に基づいて、運転支援を行う運転支援装置10において、車両の走行状態に関する走行状態情報が入力される走行状態情報入力部9と、走行状態情報に基づいて、複数の撮影部1a、1b、1cのうちいずれか一の撮影部を選択する撮影部選択部83と、この撮影部選択部83により選択された撮影部により撮影された車両周辺画像に基づいて、車両の周辺の障害物を検出するための障害物検出処理を行う障害物検出部4とを備える運転支援装置を提供する。
(もっと読む)
車両制御装置、車両制御方法及びコンピュータプログラム
【課題】道路に規定された規制内容を車両に遵守させる為の遵守支援を適切な状況で実施することを可能とした車両制御装置、車両制御方法及びコンピュータプログラムに関する。
【解決手段】車両が道路に規定された規制内容を遵守したか否か判定し、車両が規制内容を遵守していないと判定された場合に、遵守支援の内容や遵守支援の実施を取り止める為の遵守支援解除条件を設定するとともに履歴情報として交通違反履歴テーブル32に記憶し、交通違反履歴テーブル32に記憶された履歴情報に基づいて車両に対して遵守支援を実施するとともに(S14)、車両が遵守支援解除条件を満たした場合には履歴情報として記憶された遵守支援の内容と遵守支援解除条件を削除し、遵守支援の実施を取り止める(S23、S24)ように構成する。
(もっと読む)
車線検出プログラム及び車線検出装置
【課題】車線の検出結果を利用した別処理を行う場合に、誤った処理結果が導出されるのを防止すること。
【解決手段】車線検出装置1は、車両に搭載したカメラにより取得された画像から、路面に標示された車線および該車線以外の路面標示を検出する検出部2を有する。さらに、車線検出装置1は、検出部2によって車線のみが検出された場合には該車線の検出結果を出力し、車線とともに該車線以外の路面標示が検出された場合には該車線の検出結果の出力を抑止する出力制御部3を有する。
(もっと読む)
車両用外界認識装置
【課題】パターンマッチにより歩行者を検知する際に、電柱,ガードレール,路面ペイント等の人工物に対する誤検知を、少ない処理負荷で低減することができる車両用外界認識装置を提供する。
【解決手段】自車前方を撮像した画像を取得する画像取得部(1011)と、その画像から歩行者を検出する処理領域を設定する処理領域設定部(1021)と、その画像から歩行者の有無を判定する歩行者候補領域を設定する歩行者候補設定部(1031)と、歩行者候補領域内の所定方向の濃淡変化量の割合に応じて歩行者候補領域が歩行者であるか人工物であるかを判定する歩行者判定部(1041)と、を備える。
(もっと読む)
ドライブレコーダ
【課題】車両のふらつき走行を一定の精度で検出できるとともに、高精度且つ高速に検出できるドライブレコーダを提供する。
【解決手段】ドライブレコーダは、車両が走行する車線内における前記車両の走行位置を周期的に検出する走行位置検出手段21bと、走行位置検出手段21bによって検出された最新の走行位置とその直前の走行位置との変化量を算出する変化量算出手段21cと、変化量算出手段21cによって算出された前記変化量が予め設定されたふらつき走行判定閾値を超えたときに前記車両のふらつき走行を検出するふらつき走行検出手段21cと、前記ふらつき走行検出手段21cによって前記車両のふらつき走行が検出されたとき、前記最新の走行位置を検出した直前に車両状況情報検出手段21aによって検出された前記車両状況情報を記憶媒体Cに記録する車両状況情報記録手段21eと、を備えている。
(もっと読む)
安全運転の支援機能を備える車両用のナビゲーション装置
【課題】運転者が車両の安全運転の支援機能の設定をする際、その設定を推奨する情報を表示させる車両用のナビゲーション装置を提供する。
【解決手段】ナビゲーション装置は、入力手段と、支援機能を表示する表示手段と、支援機能を有効または無効とする設定をおこなうための設定情報と、当該設定を推奨する推奨設定情報とを格納するメモリと、表示手段に設定情報を表示させる際に、推奨設定情報を設定情報に反映させて表示手段に表示させる制御手段と、を備える。
(もっと読む)
安全運転の支援機能を備える車両用のナビゲーション装置
【課題】車両の安全運転の支援機能をより活用できるようにする。
【解決手段】ナビゲーション装置100は、入力手段14と、支援機能を表示する表示手段12と、支援機能を有効または無効とする設定をおこなうための設定情報と、当該設定を支援する設定支援情報とを格納するメモリ18と、表示手段に設定情報を表示させる際に、設定情報に対する入力手段を介した入力に応じて、設定支援情報を表示手段に表示させる制御手段10と、を備える。
(もっと読む)
車両
【課題】通知システム及び減速支援システムの両方を運転者の期待通りに作動させる。
【解決手段】車両(1)は、所定の通知条件が成立したことを条件に、信号機の灯色が赤である期間の残り時間を通知する通知システム(10)と、所定の減速支援条件が成立したことを条件に、車速が低下するように所定の減速制御を行う減速支援システム(20)と、を備える。車両は、所定の減速支援条件が成立した場合に、所定の通知条件を緩和する条件緩和手段(109)を備える。
(もっと読む)
走行支援装置
【課題】自車両が走行車線を離れる際に警報を行うことで安全走行を支援する走行支援装置において、車線変更時の安全性を向上させること。
【解決手段】後続車両が存在するか否かを判定する(S110)。後続車両が存在すると判定された場合には(S110:YES)、運転者に車線変更の意図があるか否かを判定する(S120)。具体的には、ドライバ操作判定部が、ステアリングセンサから入力された自車両のステアリングホイールの操作状態からステアリングホイール操作の有無を判定する。運転者に車線変更の意図があると判定された場合には(S120:YES)、自動ウインカをONに設定するとともに警報ACTによる報知警報をONに設定する(S130)。なお、自動ウインカがONに設定されると作動機能調停部が自動ウインカを作動させ、警報ACTによる報知警報がONに設定されると作動機能調停部が警報ACTを作動させる。
(もっと読む)
衝突予測装置
【課題】低コストで精度の高い衝突予測を可能とする衝突予測装置を提供する。
【解決手段】車両に搭載され、当該車両と障害物との衝突を予測する衝突予測装置であって、車両の周囲に電磁波を送信し、障害物から反射された当該電磁波の反射波を受信することによって当該障害物を検出する障害物検出手段と、障害物が検出された場合、車両と障害物との衝突の危険性が高いか否かを判定する衝突判定手段と、高さの異なるフロアを往来するためのスロープを備えた建築造成物内において当該スロープ上を車両が走行している可能性が高いか否かを判定するスロープ走行判定手段と、車両がスロープを走行している可能性が高いと判定された場合、衝突判定手段の判定感度を車両がスロープを走行している可能性が高いと判定されていない場合に比べて低減する感度変更手段とを備える、衝突予測装置。
(もっと読む)
車両用運転支援装置
【課題】地理的な対象物の探索に関して、処理速度と検出精度とを高めることができる車両用運転支援装置を提供する。
【解決手段】前方監視カメラ3、GPS4、ジャイロセンサ5、制御ユニットUを利用して、ナビゲーション装置6が保有する三次元地図データとしてのボクセルBを抽出すると共に、そのボクセルBのうちから、区画線23等を含むものを抽出し、それらを前方監視カメラ3が撮影した撮影画像に組み込む。そして、その撮影画像21全域ではなく、その撮影画像21のうち、区画線23等を含むボクセルBについてのみ、区画線23等の検出処理を行う。これにより、探索領域(検出範囲)を少なくする。
(もっと読む)
車両の制御装置
【課題】自動車等の車両において、適切なタイミングで運転支援制御を実行する。
【解決手段】車両の制御装置は、車両が停止する際の状況を検出する状況検出手段130と、車両が停止する際の運転者による減速タイミングを検出する減速検出手段140と、状況及び減速タイミングを互いに関連づけて学習を行う学習手段120と、学習後に、走行中の車両が学習された状況に近い状態となったことを認識する状況認識手段150と、状況に近い状態であることが認識された場合に、学習された状況に関連づけられた減速タイミングに応じて運転支援制御を行う運転支援制御手段160とを備える。
(もっと読む)
運転支援装置
【課題】、方向指示器を作動させた特定車両の挙動を高精度に予測する運転支援装置を提供することを課題とする。
【解決手段】方向指示器を作動させた特定車両(例えば、先行車両)についての旋回タイミングを予測する運転支援装置であって、特定車両の周辺に存在する周辺車両(例えば、先先行車両)の位置を取得する周辺車両位置取得手段と、特定車両が方向指示器を作動させた際の周辺車両の位置に応じて特定車両の旋回タイミングを予測する予測手段を備えることを特徴とし、周辺車両の特定車両との相対距離及び相対速度の少なくとも一方の相対情報を取得する相対情報取得手段を備え、予測手段は、周辺車両の特定車両との相対情報を用いて特定車両の旋回タイミングを予測すると好適である。
(もっと読む)
死角領域推定装置及びプログラム
【課題】、簡易な処理で、動的死角領域を推定することができるようにする。
【解決手段】存在確率変更部26によって、地図情報において、レーザレーダ12によって検出された現在の物体の位置に対応するブロックの存在確率を増加させると共に、自車両から検出された現在の物体の位置までの直線上に存在するブロックの存在確率を減少させることにより、静止物の位置を記録した地図情報を取得する。静的死角推定部28によって、取得された地図情報に記録された静止物の位置と、自車両の現在の位置とに基づいて、静的死角領域を推定する。現死角推定部30によって、レーザレーダ12によって検出された現在の物体の位置に基づいて、現在死角領域を推定する。動的死角推定部32によって、推定された現在死角領域と、推定された静的死角領域との差分に基づいて、動的死角領域を推定する。
(もっと読む)
1 - 20 / 581
[ Back to top ]