
Fターム[5H180LL07]の内容
交通制御システム (133,182) | 衝突防止 (18,251) | 合図、警報を出力するもの (5,461) | 音による警報であるもの (2,307)
Fターム[5H180LL07]に分類される特許
21 - 40 / 2,307
運転支援システム
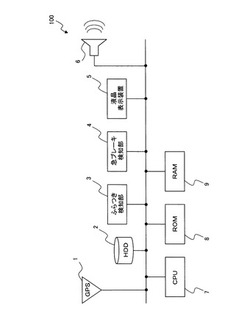
【課題】リアルタイムに、運転者の実情に合わせて、休憩を促すことができる運転支援システムを提供する。
【解決手段】車両の運転を支援する運転支援システム100に、車両の運転者に休憩取得のアドバイスを通知する液晶表示装置5及びスピーカ6の少なくとも一方と、車両のふらつきを検出するふらつき検知部3と、ふらつき閾値を記憶するHDD2と、車両の所定時間あたりのふらつきの回数がふらつき閾値を超えているか否かを判定し、車両の所定時間あたりのふらつきの回数がふらつき閾値を超えていると判定した場合に、液晶表示装置5及びスピーカ6の少なくとも一方を制御して、運転者に休憩取得のアドバイスを通知させるCPU7と、を備えた。
(もっと読む)
運転支援装置

【課題】自車両を車線変更させる場合において、車線変更先の交通流への影響を少なくする。
【解決手段】運転支援装置1は、自車両の車線変更の際に運転を支援する装置であって、車車間通信装置10または車両センサ11により車線変更先の車線における交通状況が取得され、制御ECU20は、取得された交通状況に基づき、自車両の車線変更が、車線変更後における自車両の後続車両に与える影響を予測し、自車両の後続車両に与えられた影響が、車線変更先の交通流に与える影響を予測し、車線変更先の交通流への影響の予測に基づき、自車両の車線変更可否を判定する。これにより、車線変更先の交通流への影響が考慮された上で、自車両の車線変更可否が判断されることとなる。従って、自車両を車線変更させる場合において、車線変更先の交通流への影響を少なくすることが可能となる。
(もっと読む)
覚醒支援装置
【課題】車両の運転者に対する能動的動作の誘発による覚醒支援の効果を高めること。
【解決手段】覚醒支援システムの一部である8個の圧電素子11〜18は、自身に生じた応力の大きさに依存した電圧を発生する素子であり、自動車のステアリングホイール10に設けられる。圧電素子11〜18は、運転者がステアリング操作のために把持部220を握った状態において、第2〜第5指(親指以外の指)それぞれによって触りやすい(叩きやすい)ように配置されている。そして、運転者が圧電素子11〜18を叩くことによって電圧が発生すると、覚醒支援システムによって音が出力されるようになっている。そして、運転者が眠気を感じた場合、音楽を出力し、その音楽に合わせた圧電素子11〜18の叩き操作を運転者に促すことで、指の運動に伴う固有知覚による覚醒支援を実現する。
(もっと読む)
物体認識装置
【課題】撮影画像のコントラストを、当該撮影画像に含まれる道路上の物体を認識するのに最適な状態に調整することができる技術を提供する。
【解決手段】他車両や落下物などの物体が存在する蓋然性の高い道路14部分と、車線(道路14)に沿って道路14上に描かれている白線13とに着目し、特に、白線13部分と道路14部分とのコントラストが強調されるように上方視の画像tFのコントラストを調整することにより、道路14上に物体が含まれているときには、道路14部分と物体との境界が極めて明りょうとなり、上方視の画像tFのコントラストを、上方視の画像tFに含まれる道路14上の物体の認識に最適な状態に調整することができる。したがって、コントラストが画像処理による物体認識に最適な状態に調整された上方視の画像tFを処理することで確実に道路14上の物体を認識することができる。
(もっと読む)
運転支援装置
【課題】運転支援装置において、他車両の運転者がウインカを出し忘れていても、他車両の経路誘導情報から衝突可能性を判定することにある。
【解決手段】制御装置(4)は、特定された他車両のウインカ情報と経路誘導情報とを取得し、特定された他車両のウインカ情報が指し示す進行方向と経路誘導情報が指し示す進行方向とを比較して、ウインカ情報は直進を指し示しているが、経路誘導情報は右折又は左折を指し示す場合に、特定された他車両と自車両とが特定された交差点において衝突する可能性があると判定する衝突可能性判定手段(15C)を備え、他車両と自車両とが衝突する可能性があると判定された時に自車両の運転者に警告するために警告手段(13、14)を作動制御する。
(もっと読む)
電動車椅子の走行制御方法
【課題】障害物検知センサより障害物を検知して電動車椅子を走行停止させる機能させている電動車椅子において、障害物への衝突抑制制御を行いつつ、障害物の近傍迂回や離合、すれ違い、室内の壁際へ車体を収めるとなどの難しい操作を容易行える電動車椅子を提供する。
【解決手段】障害物を検知して走行禁止判定となり走行が一旦停止した後に、再度操作手段を停止以前と同じ方向に操作された場合は、注意喚起のため警報を発報ながら走行を許可する、さらに障害物の存在が判っている条件下では、自動的に速度を最低速に抑える制限を設けると共に、走行速度に応じて障害物検知の感度を変更する事によって、衝突の危険性を最小限押さえながら、すり抜けや狭所へ電動車椅子を収めると言った緻密な操作が容易となる。
(もっと読む)
車種判別装置及び運転支援装置
【課題】簡単に、かつ低コストに、自車両の前方を走行する車両の種別判別を行うことができる種別判別装置を提供する。
【解決手段】本発明の種別判別装置によれば、車載カメラ11が自車両に搭載されており、当該車載カメラ11が走行中自車両の前方を走行している車両を撮影する。画像メモリ12に撮影した画像を記憶する。そして、画像処理手段13は、撮影した前方車両の特長部位の画像を構成する画素数を計測する。更に、車種判別手段14は、計測した画素数と予め定めた閾値とを比較し、前方車両の車種を判別する。
(もっと読む)
対象物の位置を算出するための装置
【課題】車両の挙動如何にかかわらず、撮像された画像から検出された対象物の位置を、より良好な精度で判定する。
【解決手段】車両に搭載されたカメラを用いて車両の周辺を撮像し、撮像された画像に基づいて、実空間において車両から所定値以上の距離を有し、かつ所定値以上の高さに位置すると推定される遠方物体を検出する。また、撮像された画像に基づいて、所定の対象物を検出する。画像上において、該検出された遠方物体に含まれる所定の点を基準として、該検出された対象物に含まれる所定の点の位置を特定する。該画像上の該特定された位置に基づいて、実空間上の対象物の位置を算出する。画像において、遠方物体に対する対象物の相対的な位置関係は、車両のピッチング等の影響を受けないため、該ピッチング等の影響を受けることなく、対象物の実空間上の位置を求めることができる。
(もっと読む)
距離認識装置
【課題】自車から遠い位置の物体が撮影画像に含まれている場合に、自車から物体までの距離の認識精度の向上を図ることができる技術を提供する。
【解決手段】各エッジhEG,lEG,rEGに基づいて距離算出手段により算出された自車から物体までの距離Zに基づいて自車から物体までの距離が認識手段6eにより認識されるため、自車から遠い位置の物体が撮影画像Fに含まれているときに、各エッジhEG,lEG,rEGに基づいて距離算出手段6dにより算出される各距離Zが自車と物体との実際の距離とずれるおそれがある場合であっても、それぞれ異なる方法で算出される各距離Zに基づいて自車から物体までの距離Zが認識されるため、認識される距離が実際の距離Zから大きくずれることが防止され、自車から物体までの距離Zの認識精度の向上を図ることができる。
(もっと読む)
区画線検出装置
【課題】高い精度で区画線を検出する区画線検出装置を提供する。
【解決手段】画像処理ECUは、路面画像のデータを取得し(S10)、取得した路面画像に基づいてエッジ点を抽出する(S12)。次に、動作モードを判断し(S14)、破線モード,フレーム加算モードのいずれかであれば(S14:YES)、フレーム加算処理を行う(S18、S20)。続いて、エッジ線の抽出を行う(S22)。ここでは、エッジ点をハフ変換して、一番多くエッジ点を通るエッジ線を抽出する。なお、このS22にて抽出されたエッジ線が区画線となる。次に、警報処理を行い(S24)、車両が車線から逸脱する危険ありと判定すれば、ブザーに対してブザー要求の制御信号を出力する。
(もっと読む)
区画線検出装置
【課題】区画線を適切に検出する区画線検出装置を提供する。
【解決手段】画像処理ECUは、路面画像のデータを取得し(S10)、取得した路面画像に基づいてエッジ点を抽出する(S12)。次に、S12にて抽出されたエッジ点から縦方向に連続するエッジ点をノイズとして除去し(S14)、ハフ変換によってエッジ線の抽出を行う(S16)。次に、抽出したエッジ線に基づいて区画線位置の算出を行い(S18)、区画線の逸脱判定を行う(S20)。ここでは、ヨーレートおよび車両速度に基づいて予測した車両の走行軌跡と、S18にて算出した区画線の位置とから車両が区画線を逸脱するまでに要する時間を算出する。算出した時間が所定のしきい値以上であれば逸脱しないと判定し(S20:NO)、しきい値未満であれば逸脱の危険ありと判定し(S20:YES)、ブザー要求の制御信号を出力する(S22)。
(もっと読む)
運転支援装置
【課題】 安価な構成で運転技術が高くない人が陥りやすい多くの場面において安全運転に寄与することができる運転支援装置を提供する。
【解決手段】 測定手段2は、車両前後に取り付けられ、車両から障害物までの距離を測定し距離情報を取得する。車両情報収集手段5は、車内ネットワークより車両情報を取得する。誤発進判定手段3は、距離情報及び車両情報に基づいて車両の誤発進を判定する。追突推定手段3は、距離情報及び前記車両情報に基づいて後続車両との追突可能性を推定する。警報手段4は、誤発進判定手段及び追突推定手段の判定結果に基づいて警報を行う。車両情報収集手段5は、少なくとも速度情報及びギアポジション情報を取得する。
(もっと読む)
白線認識装置
【課題】自車両にピッチングが生じても白線を正確に認識できる白線認識装置を提供すること。
【解決手段】自車両の前方の道路を含む領域の画像を撮影する撮影手段3と、前記撮影手段3により撮影される画像の1フレームごとに、道路における白線のエッジを抽出するエッジ抽出手段7と、前記エッジ抽出手段7により抽出された前記白線のエッジを、前記1フレームごとに順次記録し、前記白線のエッジの履歴を作成する履歴作成手段7と、前記白線のエッジの履歴を用いて、前記白線を認識する白線認識手段7と、前記自車両のピッチングを検出するピッチング検出手段7とを備え、前記履歴作成手段7は、前記ピッチングが検出されたときに撮影されたフレームにおける前記白線のエッジは、前記履歴に含めないことを特徴とする白線認識装置1。
(もっと読む)
車両の周辺監視装置
【課題】車両の周辺の対象物を確実に抽出して、速やかに運転者に知らせることが可能な車両の周辺監視装置を提供する。
【解決手段】周辺監視装置は、車両に搭載され、該車両の周辺の物体の位置を特定する物体位置特定手段と、車両に搭載され、該車両の周辺の画像を取得する撮像手段と、撮像手段により取得された画像を多値化する多値化手段と、物体位置検出手段が特定した物体の位置に対応する前記取得された画像に、該物体の位置の各々に対応する所定サイズのマスクを設定するマスク設定手段と、マスク設定手段により設定されたマスク毎に、対応する画像を多値化する際のしきい値を設定する多値化しきい値設定手段と、多値化手段により、対応する多値化しきい値を用いて多値化された画像に基づき所定の対象物の有無を判定する判定手段と、を備える。
(もっと読む)
運転支援装置
【課題】自車両周辺の移動体の将来の移動状態を高精度に予測する運転支援装置を提供することを課題とする。
【解決手段】自車両周辺の移動体の将来の移動状態を予測し、当該将来の移動状態に基づいて運転支援を行う運転支援装置1であって、移動体の現在の移動状態を取得する移動状態取得手段10と、取得した移動体の現在の移動状態に基づいて移動体の将来の移動状態を予測する移動状態予測手段32と、移動体周辺の交通規則情報を取得する交通規則情報取得手段11を備え、移動状態予測手段32は、取得した交通規則情報を用いて移動体の将来の移動状態を予測することを特徴とする。
(もっと読む)
車両周囲監視装置
【課題】本発明は、車外の人に対する警告を、人の顔向きで判断し、自車両の方を向いているか否かの判断を行い、自車両の方を向いていない場合のみ、注意喚起を行うことができる車両周囲監視装置を提供する。
【解決手段】人感知手段4は、撮像手段1で撮像した画像と人感知パターン記憶手段8の人感知パターンを比較して、車両周囲に人が存在するかどうかを確認する。人感知手段4が人を感知した場合、顔検知手段5が人の顔向きを判断し、車両周囲の人の両目を検知しない場合のみ、警告出力手段6により車両周囲の人へ注意喚起を行う。
(もっと読む)
音声出力システム
【課題】案内音声を確実に聞くことができる音声出力システムを提供する。
【解決手段】音声種別判定部6によって出力対象の音声データの種別がナビゲーション機能の案内音声であると判定されると、音声出力検知部7は音声出力が可能な全ての音声出力装置5を検知し、音声出力判定部8は検知した音声出力が可能な全ての音声出力装置5で出力対象の音声データの案内音声を出力するよう制御する。
(もっと読む)
運転支援装置
【課題】運転者に対して、駐車開始を実行する際の位置合わせの精度を向上させるための情報を提供したい。
【解決手段】生成部22は、車両に設置された少なくともひとつの撮像装置によって撮像された画像をもとに、車両周辺の鳥瞰図画像を生成する。予想軌跡記憶部30は、鳥瞰図画像に対応すべき車両の予想軌跡であって、車両のハンドルを操作して車両を移動させる場合の予想軌跡をハンドルの舵角を変えながら複数記憶する。合成部32は、予想軌跡記憶部30において記憶した複数の予想軌跡を鳥瞰図画像に重畳して表示する。
(もっと読む)
車両制御装置
【課題】ドライバの走行特性に合致した逸脱判定を行うことが可能な車両制御装置を提供する。
【解決手段】車両制御装置1では、走行軌跡情報取得センサ2によって、車両10と該車両10の一側方側における認識可能な白線Lとの間の距離Xが検出される。そして、ECU5により、距離Xの平均値μ及び分散値σに基づいて、車両10が一側方側と反対の他側方側に移動した際の車両10の逸脱判定が行われる。これにより、車両制御装置1によれば、ドライバの走行軌跡の特徴を逸脱判定に好適に反映させることができる。
(もっと読む)
脇見警報装置
【課題】運転者の脇見状態の詳細に応じた適切な警報を行なう。
【解決手段】脇見警報装置10は、運転者の注視あるいは脇見が、視線方向のみに拠る状態(視線注視)であるか、顔向き方向に拠る状態(顔向き注視)であるかを判定する注視判定部23及び脇見判定部25を備える。注視判定部23は、視線方向又は顔向き方向が記憶部24に記憶された注視方向領域内に注視判定時間に亘って含まれる場合に、運転者が特定対象物を注視する状態であると判定する。脇見判定部25は、視線方向又は顔向き方向が、記憶部24に記憶された脇見方向領域内に脇見判定時間に亘って含まれる場合に、運転者が脇見状態であると判定する。顔向き注視での注視判定時間及び脇見判定時間は、視線注視での注視判定時間及び脇見判定時間よりも短く設定されている。
(もっと読む)
21 - 40 / 2,307
[ Back to top ]