
Fターム[5H180LL11]の内容
Fターム[5H180LL11]に分類される特許
1 - 20 / 55
駐車支援装置
【課題】運転者が自車両の切り返しの有無を含めた駐車の可否や難易度を直感的に判断することができる駐車支援装置を提供する。
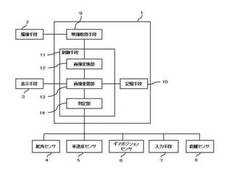
【解決手段】少なくとも自車両後方の撮像映像を取得する映像取得手段9と、この映像取得手段9が取得した撮像映像に自車両の駐車目安枠を重畳して合成映像を表示手段3に出力する画像重畳部13とを備え、画像重畳部13に重畳される自車両の駐車目安枠は、駐車可能な限界領域を示す第1の目安枠と、この第1の目安枠から自車両の進行方向側に延出して駐車の際に自車両の切り返しが必要な領域を示す第2の目安枠とを有することを特徴とする。
(もっと読む)
車種判別装置及び運転支援装置

【課題】簡単に、かつ低コストに、自車両の前方を走行する車両の種別判別を行うことができる種別判別装置を提供する。
【解決手段】本発明の種別判別装置によれば、車載カメラ11が自車両に搭載されており、当該車載カメラ11が走行中自車両の前方を走行している車両を撮影する。画像メモリ12に撮影した画像を記憶する。そして、画像処理手段13は、撮影した前方車両の特長部位の画像を構成する画素数を計測する。更に、車種判別手段14は、計測した画素数と予め定めた閾値とを比較し、前方車両の車種を判別する。
(もっと読む)
車両の衝突回避支援装置
【課題】車両の衝突回避支援装置に関し、最大高さが変化する車両の最高部位が障害物に衝突することを回避もしくは衝突速度を低減できるようにする。
【解決手段】最大高さが変化する車両に装備され、車両前方に位置する障害物Oとの衝突を回避するための衝突回避支援装置において、車両3の最大高さHを検知する最大高さ検知手段11と、車両前方で前記最大高さHと同一高さに位置する障害物Oを検知する障害物検知手段12と、前記最大高さH以下に障害物Oがあることを車両3のドライバに警報する警報手段13とを備えた。
(もっと読む)
運転支援装置
【課題】車両の運転を支援する上で、距離感を掴みやすい映像が表示される運転支援装置を提供する。
【解決手段】運転支援装置であって、映像32を前記車両の前方周辺に表示させる表示手段30と、映像32の形態を制御する制御手段40と、を備え、制御手段は、映像32を地表50と所定高さ51との間で往復運動させ、往復運動は、所定高さ51において映像32の上下方向の移動速度をゼロとする所定高さ51から地表50への自由落下運動と、所定高さ51からの自由落下運動によって映像32が地表50に衝突する位置に到達した後、重力加速度下で所定高さ51が最高点となる上方向の初速度を有する、地表50から所定高さ51への放物運動と、からなり、往復運動をしている映像32が地表50に衝突する位置に到達したときに効果音20を出力するよう構成されている。
(もっと読む)
運転支援装置
【課題】車両の運転を支援する上で、距離感を掴みやすい映像が表示される運転支援装置を提供する。
【解決手段】車両10の運転を支援する映像32を表示する運転支援装置であって、前記映像32を前記車両10の前方周辺に表示させる表示手段30と、前記車両10のステアリング12に設けられ、乗員が前記ステアリング12を把持する押圧力および乗員がペダルを踏む踏力の両方もしくは一方を検出する押圧力検出手段40と、前記押圧力および前記踏力の両方もしくは一方に応じて前記映像32の形態を変化させ、前記表示手段に表示させる映像調整手段20と、を備える構成とした。
(もっと読む)
車線認識装置
【課題】車両が鉛直方向に沿って変位することによって走行路の情報の測定結果が変動しただけで、走行路の情報を測定する処理を中断しない車線認識装置を提供する。
【解決手段】カメラで撮像した画像に基づいて予め定められた時間間隔での車線幅の差分を求め、さらに、前部車高センサ、及び後部車高センサによって測定された高さに基づき自車両のピッチ角の前述の時間間隔での差分を求める。求めたピッチ角の差分に基づき、前述のカメラが当該ピッチ角の差分だけ変位したときに測定される車線幅の変動量を推定し、推定した変動量だけ、予め定められた車線幅に対する許容範囲を調節する。
(もっと読む)
走行環境推測装置、方法及びプログラム並びに車線逸脱警報装置及び操舵アシスト装置
【課題】白線認識と同等の精度で走行路幅を推測することで、白線の認識が不能の際にも安定した走行環境の推測を継続する。
【解決手段】 車載のカメラ10と、原画像水平エッジeをカメラ座標系で抽出する水平エッジ抽出部12と、予め定められた座標変換係数56に基づいて、原画像水平エッジeを世界座標系54での水平エッジEに変換する座標系変換部14と、前記水平エッジEから対象物幅W及び対象物距離Lを算出すると共に、予め定められた想定対象物幅Wpに基づいて、前記対象物幅Wと前記走行環境の走行路幅Wrとの関連58を判定する関連判定部16と、前記関連58と前記対象物幅Wとに基づいて前記走行路幅Wrを推測する走行路幅推測部18とを備えた。
(もっと読む)
車両運転支援装置
【課題】画面に表示される自車両の走行予測線を容易に認識することができる「車両運転支援装置」を提供すること。
【解決手段】車両運転支援装置は、表示手段と、自車両の周囲の画像を取得する撮像手段と、自車両の画像のデータを予め格納すると共に、撮像手段により取得された画像のデータを格納する記憶手段と、自車両のハンドルの操舵角の情報を取得する舵角センサと、操舵角に応じて前記自車両が動く軌跡を算出し、注意を喚起する態様で軌跡を表示するように画像処理した走行予測線(44,45)と自車両の周辺の画像とを合成して表示手段の画面に表示させるよう制御する制御手段とを有する。自車両が動く軌跡は、少なくとも自車両のタイヤ軌跡44又は自車両の平面投影のうちのバンパーの両端部を示す車体軌跡45のいずれかであるようにしてもよい。
(もっと読む)
コンテナ車両危険度検査装置
【課題】通路に設置されたカメラによりコンテナ車両を撮影した画像から、コンテナ車両が走行する際の危険度を検査する、コンテナ車両危険度検査装置を提供することである。
【解決手段】コンテナ挙動データ作成部32がコンテナ画像解析部31で解析されたデータであるコンテナの傾き角度の時系列データを作り、コンテナ挙動データとしてまとめ、コンテナ挙動データベース36が様々な状態のコンテナ挙動データを予め保管しており、コンテナ挙動照合部33がコンテナ挙動データ作成部32によりまとめられたコンテナ挙動データとコンテナ挙動データベース36に保管されているコンテナ挙動データとの照合を行い、どのコンテナ挙動データと類似しているかを調べ、走行危険度判断部34がコンテナ挙動照合部33よる照合結果からコンテナ車両の状態を推測し、そのコンテナ車両の走行時の危険度を判断する。
(もっと読む)
不充分な通過可能高さ又は不充分な通過可能幅を持つ障害物を警告する方法及び装置
【課題】小さすぎる通過可能高さ又は小さすぎる通過可能幅を適時に運転者に警告する。
【解決手段】通過にとって重要な障害物のデータを求めるため、前にある頭上障害物又は前にある側方障害物及びそれぞれの車道表面が走査され、求められた障害物の通過にとって重要なデータが、車両の通過にとって重要なデータと比較され、車両の通過にとって重要なデータが、障害物の通過にとって重要なデータを上回るか又はそれと同じである場合、警告信号が運転者に与えられる。
(もっと読む)
車両情報生成装置、コンピュータプログラム及び車両情報生成方法
【課題】自車両及びその周辺車両などの対象車両の位置関係を示す車両情報を生成することができる車両情報生成装置、コンピュータプログラム及び車両情報生成方法を提供する。
【解決手段】車両感知器10は、計測地点を通過する車両の通過時刻、車頭時間間隔若しくは車尾時間間隔、車間時間又は存在時間などのデータを計測し、計測したデータを通信装置20へ出力する。車両情報生成装置は、通信装置20を介して受信した計測データに基づいて車両の位置関係を示す車両情報を生成する。各車両の位置は、例えば、車両の通過時刻と計測終了時刻との時間差に車両の速度を積算することで計測地点からの距離を求めることができる。また、計測地点と停止線との距離により各車両の停止線までの距離を求めることができる。
(もっと読む)
駐停車判定装置
【課題】円滑な交通を確保し、且つ駐停車不可の報知を適切に行う。
【解決手段】駐停車判定装置1によれば、車両幅情報取得ユニット4で車両幅情報が取得されると共に、車道情報取得ユニット3で車道情報が取得され、コントローラ5で車道情報に基づいて通行幅が求められる。そして、コントローラ5で、通行幅情報と車両幅情報とに基づいて駐停車車両周辺を通行不可能な他車両が存在するか否かが判定される。よって、他車両が駐停車車両周辺を通行するのが困難な場合には、運転者に駐停車不可の報知が報知器6により行なわれる。さらに、駐停車車両周辺を通行する可能性がある他車両の車両幅情報が取得されることから、駐停車車両周辺を通行しようとする他車両の車両幅の広狭に応じて駐停車の可否が判定されることになる。よって、実際の交通状況に即した報知が報知器6により行なわれる。
(もっと読む)
駐車支援装置および駐車支援装置用のプログラム
【課題】乗員がスムースに降車できるような駐車支援を実現する。
【解決手段】駐車支援制御部は、乗員の体格を検出し、乗員が着座している座席に最も近いドアから当該乗員が降車するときに最低限必要なドアのオープン距離を決定する。そして駐車支援制御部は、優先座席情報に優先モードの設定がある場合(315)、当該優先モードの対象となるドア側の車両側方に、当該ドアについての上記必要オープン距離以上の空間(すなわち、障害物のない空間)を確保できるよう、車両を誘導する(320、355)。
(もっと読む)
情報処理装置及び情報処理方法等
【課題】車両等の移動体の外形上の位置を正確に計算し、移動体の外形上の位置に基づく情報を、ユーザに対してより効果的に提示することが可能な情報処理装置及び情報処理方法等を提供する。
【解決手段】車載用ナビゲーション装置Sは、GPS受信部1からの測位データを取得すると共に、情報記憶部4から車両外形寸法データ及びアンテナ位置データを取得し、これらのデータに基づいて、車両の外形上の位置を計算し、計算した車両の外形上の位置に基づく情報をユーザに対して提示するように構成した。
(もっと読む)
ナビゲーション装置及び方法
【課題】ナビゲーション装置において、ユーザが保有する個々の車両に応じたより適切なナビゲーションを行うことができるようにする。
【解決手段】ナビゲーション装置が搭載された車両の現在位置及び地図データベースに基づき、該車両が走行する道路に関して各種案内を行うナビゲーション装置において、該車両の車幅の設定を受け入れる設定手段21を備え、地図データベース12には各道路の幅員に関する情報が含まれており、設定手段により設定された車幅、及び各道路の幅員を考慮して、車両が走行する道路に関する各種案内24、25を行うようにする。
(もっと読む)
運転支援システム
【課題】表示装置上に表示された撮像画像やガイドを、簡易な操作で容易に調整できる運転支援システムを提供することを目的する。
【解決手段】 表示装置4に鳥瞰表示(上空から斜め下方向を見下ろしたような表示)された画像及びガイドのずれを修正して希望とおりに表示されるように調整する場合に、ユーザは表示されている画像及びガイドをいわゆる俯瞰表示(上空から真下方向を見下ろしたような表示)に変換して修正及び調整することができる。
(もっと読む)
自動車が間隙を通過できるか否かを決定する方法およびシステム
【課題】自動車が、損傷することなく、制限された間隙を通過できるか否かの決定を可能にする方法を提供する。
【解決手段】自動車が道路の間隙を通過できるか否かを決定する方法であって、道路(30)の制限された間隙を検出するステップと、自動車のイメージ(32)を画定するステップと、自動車のイメージ(32)を制限された間隙(30)と比較するステップを含む。
(もっと読む)
前方車両認識装置
【課題】光を投光して種々の対象物との距離又は傾きを検出可能な前方車両認識装置を提供すること。
【解決手段】投光パターン20が投光された対称物を撮影し、撮影された投光パターン20の形状に基づき対象物との距離L又は傾きθを検出する車両認識装置1において、投光パターンを投光するための複数の点灯パターンを記憶した点灯パターン記憶手段13bと、撮影された投光パターン20の検出状態に基づき点灯パターンを変更する変更手段14aと、を有することを特徴とする。
(もっと読む)
車両用運転支援システム
【課題】退避支援が継続されることによりドライバの判断ミスを誘発したり煩わしさを感じさせることなく、適切な状況で緊急車両に対する退避支援を実行できる運転支援システムの実現。
【解決手段】運転支援システムを実現するECU5は、車車間通信装置2を介して取得した他車情報やナビ情報、走行状態情報等を利用して緊急車両位置を特定し、自車に接近しているか判定する緊急車両位置・接近判定ブロック5A、自車に接近している緊急車両との通信を安定化するための通信制御ブロック5B、自車が緊急車両に対して退避行動を実施したか判断する退避行動判断ブロック5C、自車の退避行動の有無に応じて支援内容を変更して情報提供(警報)を行う情報提供ブロック5Dを有する。
(もっと読む)
車両用運転支援システム
【課題】自車や他車の車両サイズ等を考慮に入れた実際の事象に近い形でより正確に衝突予測を行える運転支援システムを実現する。
【解決手段】外形演算ブロック5Aでは自車情報及び他車情報に含まれる車両サイズを用いて自車及び他車の各外形を方形状に近似させ、車両位置予測ブロック5Bでは自車走行状態及び他車走行状態から所定時間後の自車及び他車の各位置を予測し、衝突可能性判定ブロック5Cでは方形状に近似された自車及び他車の各外形と、予測された自車及び他車の各位置に基づいて自車と他車が衝突する可能性を判定し、情報提供ブロック5Dでは衝突可能性に応じた情報提供を行う。
(もっと読む)
1 - 20 / 55
[ Back to top ]