
Fターム[5H180LL14]の内容
Fターム[5H180LL14]の下位に属するFターム
カーブ、見通し・視界不良箇所 (1,253)
スリップし易い場所(雪道等) (67)
車庫、駐車場、ガソリンスタンド等の近傍 (344)
踏切 (36)
Fターム[5H180LL14]に分類される特許
1 - 20 / 261
車両逆走検出装置
【課題】自車両の位置情報に誤差が含まれる場合において、運転手に対し誤って警告情報を報知する可能性を低減する。
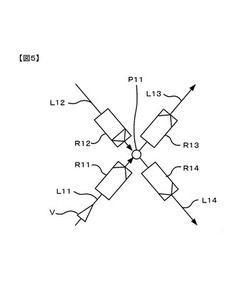
【解決手段】一方通行の道路を自車両Vが走行しているときに自車両Vが道路の分岐点P11に近づいた場合、分岐点P11から延びる道路L11〜L14に道路領域R11〜R14を作成する。分岐点P11に流入する道路であって、自車両Vがいない道路L12には、車両の通行が禁止されている方向に走行していたら逆走していることを報知する道路領域である即時有効判定エリアを作成する。自車両Vが存在し、分岐点P11に流入する道路L11と、分岐点P11から流出する道路L13およびL14とには、自車両Vが通過した後に即時有効判定エリアに変化する通過待ち判定エリアR11、R13、およびR14を作成する。
(もっと読む)
車載白線認識装置

【課題】横断歩道や複合線が存在しても、白線を正しく認識できる車載白線認識装置を提供すること。
【解決手段】車両周囲の画像を取得する車載カメラ10と、車載カメラ10で取得した画像から画像処理により白線候補を抽出する白線候補抽出手段30と、白線候補の白線らしさの確信度を算出する確信度算出手段40と、確信度算出手段40が算出した確信度に基づき、認識する白線を選択する白線選択手段50、60と、車載カメラ10で取得した画像から画像処理により複合線を検出する複合線検出手段40と、車載カメラ10で取得した画像のうち、複合線検出手段40により検出した複合線を除外した領域において、画像処理により横断歩道を検出する横断歩道検出手段120とを備え、確信度算出手段40は、白線候補が横断歩道検出手段120により検出した横断歩道に属する場合、それ以外の場合よりも、その白線候補の確信度を低くすることを特徴とする車載白線認識装置1。
(もっと読む)
確認行動支援装置
【課題】外部環境情報を要することなく、簡素なシステム構成でドライバの確認行動を支援する。
【解決手段】コントローラ3の画像入力部10にカメラ2からの撮像画像が入力され、確認行動検出部12で撮像画像を処理してドライバの確認行動を検出する。また、車両情報入力部11に車速や操舵角等の車両運転情報が入力され、この車両運転情報に基づいて、ドライバの確認行動が必要なタイミングを、確認行動タイミング判定部13で判定する。そして、支援判断部14で、確認行動タイミングの判定結果とドライバの確認行動の検出結果とに基づいて、ドライバに対する警報を含む支援情報の要否を判断し、必要に応じて音声等による警告や支援情報を出力部15を介して出力する。これにより、外部環境情報を要することなく簡素な構成でコスト低減を図りつつ、ドライバの確認行動を支援することができる。
(もっと読む)
車両のナビゲーション装置
【課題】現在位置測位精度に基づく態様で一時停止案内を行う。
【解決手段】ナビゲーション装置は、地図データ上で車両が走行する経路を走行予定経路として算出する。走行予定経路上に一時停止すべき場所が存在し、該現在位置と該一時停止すべき場所の間に、車両が現在位置する道路が、複数の分岐道路に分岐する分岐点が存在すると判断した場合、一時停止すべき場所が存在する分岐道路のそれぞれについて、該分岐道路と、該車両が現在位置する道路との間の角度αと、該分岐道路の、前記一時停止すべき場所が存在しない一つまたは複数の分岐道路に対する角度のうちの最小値Bと、該車両が現在位置する道路の幅員と、前記複数の分岐道路のうちの最も大きい幅員と、の少なくとも一つに基づいて、該一時停止すべき場所についての案内が誤案内となる可能性の程度を表す評点を算出する。該算出された評点の大きさに応じて、一時停止案内の報知形態を変更する。
(もっと読む)
減速制御装置、方法およびプログラム
【課題】運転者が煩わしさを感じることを抑制すること。
【解決手段】車両の前方の状況に基づいて前記車両を停止させるべき停止要因を特定し、前記停止要因が解消するタイミングが前記車両の運転者の運転操作に依存しない場合には、所定の制動期間で前記車両を停止させる第1減速制御を実行対象減速制御として選択し、前記停止要因が解消するタイミングが前記車両の運転者の運転操作に依存する場合には、前記第1減速制御よりも制動期間が短い第2減速制御を実行対象減速制御として選択し、前記実行対象減速制御を実行して前記停止要因に応じた停止位置にて前記車両を停止させる。
(もっと読む)
レーザセンサ及びこれを用いた検出対象判定方法
【課題】レーザセンサを用いて検出対象を追従して検出しているときに検出対象が突然消えたりして、その後以降の走査周期にて突然現れたりしても、これらが関連する検出対象であることを確実に判定することができるレーザセンサ及びこれを用いた検出対象判定方法を提供する。
【解決手段】レーザ光出射部2と、反射レーザ光に対応した受光情報を出力する受光部3と、受光情報を走査周期ごとに記憶する記憶部5と、受光情報に基づき、前回の走査周期で検出された検出対象が今回の走査周期で検出されているか否かを判別する判別部12と、判別部12の判別結果が否の場合に、検出対象を消失した検出対象として一時的に記憶する一時消失データベース11と、受光部3から受け取った次回以降の受光情報に新たな検出対象が存在する場合に、新たな検出対象が消失した検出対象と同一であるか否かを判定条件に基づいて判定するための判定部とを備えている。
(もっと読む)
運転支援装置
【課題】カーナビゲーション装置を搭載していない車両であっても、交差点における一時停止を予測し、それを的確に報知することができるようにする。
【解決手段】車両制御部12は、車両に搭載したカメラユニット10で撮影した画像データに基づいて、交差点6を検出し、次いで当該交差点6に信号機3が有るか否か、停止標識4が有るか否か、停止線5が有るか否かを調べる。そして信号機3の信号灯色が赤色或いは黄色であり、或いは停止標識4が検出され、或いは停止線5が検出された場合であって、自車両1が停止線5に到達するまでの距離Lが注意報知距離L1以内で(L≦L1)、且つ車速Vが設定車速V1以上の場合、警報装置14から運転者に注意を促す警報を発生させる。
(もっと読む)
路肩検出装置及び路肩検出装置を用いた車両
【課題】走行路面と路外との境界である路肩に白線やガードレール等の立体物がなくても、画像情報から路肩を検出する路肩検出装置を提供する。
【解決手段】入力された車外環境の三次元画像情報から対象物の有無及び自車両から対象物までの距離を算出する距離情報算出部と、算出された距離に基づく距離画像から自車両が走行する走行路面を検出する走行路面検出部と、検出された走行路面と路外との高低差を測定する高低差算出部と、測定された高低差に基づいて、走行路面と路外との境界である路肩が、走行路面より低い路外がある場合の路肩か否か判定する路肩判定部と、を有する路肩検出装置。
(もっと読む)
車載用音声発生装置
【課題】報知用の音声を鳴らす設備がない交差点において、目の不自由な歩行者に対して横断歩道の歩行を補助することが可能な車載用音声発生装置を提供することにある。
【解決手段】本発明の車載用音声発生装置は、音声発生器に対して音声の発生制御を行う音声制御部を備えている。また、車両の走行状態を示す車両情報を受信する車両情報受信部を備えている。また、車両の周辺に存在する人体の感知結果を示す感知情報を受信する感知情報受信部を備えている。また、車両の周辺を撮像した撮像画像を受信して画像解析を行う撮像画像受信部を備えている。また、車両情報において車両が停車していることが示されており、且つ感知情報において人体が感知されていることが示されており、且つ画像解析の結果において前記車両の進路上に横断歩道が存在することが示されている場合に、所定の報知音声を出力するよう音声制御部を制御する制御部を備えている。
(もっと読む)
衝突予測装置
【課題】低コストで精度の高い衝突予測を可能とする衝突予測装置を提供する。
【解決手段】車両に搭載され、当該車両と障害物との衝突を予測する衝突予測装置であって、車両の周囲に電磁波を送信し、障害物から反射された当該電磁波の反射波を受信することによって当該障害物を検出する障害物検出手段と、障害物が検出された場合、車両と障害物との衝突の危険性が高いか否かを判定する衝突判定手段と、高さの異なるフロアを往来するためのスロープを備えた建築造成物内において当該スロープ上を車両が走行している可能性が高いか否かを判定するスロープ走行判定手段と、車両がスロープを走行している可能性が高いと判定された場合、衝突判定手段の判定感度を車両がスロープを走行している可能性が高いと判定されていない場合に比べて低減する感度変更手段とを備える、衝突予測装置。
(もっと読む)
車両用画像表示装置及び車両用画像表示方法
【課題】カメラ画像を用いて障害物の検出を行い、死角が発生する可能性が高いときのみ、カメラ画像に切り替えて表示する車両用画像表示装置を提供する。
【解決手段】車両周囲の映像を夫々撮影する複数のカメラを含む撮像部と、複数のカメラのうち車両の進行先の映像を撮影する少なくとも2つのカメラで撮影した画像を比較し、比較画像の一致度に応じて障害物の有無を判定する障害物判定部と、車両の情報及び車両の進行を案内するナビゲーション情報を生成する車両情報生成部と、障害物判定部による障害物の判定結果と、車両情報生成部から入手した車両の進行先の状況を示す情報をもとに、ナビゲーション画像又は進行先周辺の映像を撮影したカメラ画像を切り替えて出力する表示切替部と、表示切替部から出力された画像を表示可能な表示部と、を具備する。
(もっと読む)
安全運転診断装置
【課題】交差点において安全確認をしていないにもかかわらず安全確認をしたと誤判定すること、及び安全確認をしたにもかかわらず安全確認をしていないと誤判定することを低減することができる安全運転診断装置を提供すること。
【解決手段】自車両Cが交差点の進入位置から2[m]より長く進入した時点以前の5[s]間の水平角信号をサンプリングする(S10〜S16)。また、その5[s]前の前後における水平角の平均の絶対値を算出して、その絶対値が所定値以上である場合は、サンプリング部13aにてサンプリングした水平角信号を加工する(S17、S18)。そして、サンプリングした水平角信号からパワースペクトルを計算すると共に、0.2〜1.5Hzにおけるパワーの極大値の総和を計算して、この総和と判定値を比較して、ドライバによる安全確認がなされたか否かを判定する(S19〜21)。
(もっと読む)
人横断支援車両システム及び人横断支援方法
【課題】横断歩道が設置されていない道路においても、歩行者の安全な道路横断を支援する歩行者横断支援車両システムを提供する。
【解決手段】人を検出する人検出手段2と、車両の位置情報を検出する自車位置検出手段3と、人検出手段2が検出した人を横断候補者として、横断候補者の絶対的な位置を計算するとともに、横断候補者が道路を横断するために待機している時間を計測して待機状態の指標である待機スコアを計算し、計算結果を人位置及び待機スコア記憶手段6に記憶する位置及び待機スコア計算手段5と、横断候補者の人位置および待機スコアに基づいて、車両を停車させるか否かを判断する停車判断手段10と、停車判断手段が車両を停車させると判断した場合に車両を停車させる走行制御手段12と、停車判断手段の指令に基づき、横断候補者に対し道路を横断可能か否かの旨の情報を表示する信号機である歩行者横断信号表示手段13と、を備える。
(もっと読む)
車載安全制御装置及び安全運転支援システム
【課題】センサの検出範囲が衝突事故発生予測位置を含んでいない場合においても、精度の高い衝突危険性度合で警告可能な車載安全制御装置及び安全運転支援システムを得る。
【解決手段】TTC演算モデル判定部14Aは、路側移動体検出装置2が検出した移動体6(対象移動体)で、かつ、所定時間Th経過後に検出範囲Ld外に移動するものと判定される移動体(仮想移動体)が存在する場合、当該対象移動体の進行方向に設置されている信号機の灯色が赤から青に変化する時点において、当該対象移動体の速度が基準速度Va以下である場合に、加速モデルとして判定し、基準速度Vaを上回る場合は等速モデルとして移動モデルを判定する。TTC演算処理部15Aは上記移動モデルに用いて、対象移動体が衝突事故発生予測位置P点に到達する到達予測時間Tpを演算する。
(もっと読む)
道路横断手旗器具
【課題】 従来は、学童等が道路を横断する場合には、手をあげたり、横断旗を出したりしていた。しかし、手の上げ方が悪かったり、携帯していても横断旗を出さないことにより交通事故の被害にあう場合があった。
また、学童等が性的被害等にあうのを防止するために防犯ブザ−を携帯するものがが多くなったが、ポケットへの収納やランドセル等への装着のため、迅速に対応できなかった場合や電池切れのため役に立たなかった状況もあった。
【解決手段】携帯型の道路横断手旗器具の旗を出すとともにブザ−を鳴らすことにより、自動車等の運転者に注意を喚起して、安全に道路を横断するものである。
また、学童等が身の危険を感ずる事案が発生した場合には、道路横断手旗器具に備えた防犯ブザ−を迅速的確に鳴らして、事案の未然防止ができるものである。
(もっと読む)
車両の衝突を回避するための装置
【課題】交差点の見通し範囲を把握し、的確なタイミングで他車両との衝突回避動作を発動する。
【解決手段】車両の周辺の障害物の位置に基づいて、車両から前方を見通せる見通し範囲を算出する。見通し範囲外から車両に向けて接近してくる移動物体と衝突することなく、交差点を該車両が通過することが可能な通過可能速度VTを、見通し範囲に基づいて算出する。通過可能速度VTよりも車両の現在の速度VNが小さいとき、衝突回避のための制御を発動する。また、車両が交差点に進入するまでに停止可能な最大速度VSを算出し、車両の現在の速度VNが該停止可能速度VSより小さいときには、該現在の速度が通過可能速度VTより小さくても、衝突回避のための制御の発動を抑制する。見通し範囲の大きさに応じた通過可能速度VTを算出するので、見通し範囲に応じて運転者が取り得る速度を考慮しつつ、衝突回避の制御を適切なタイミングで発動させる。
(もっと読む)
衝突防止装置、衝突防止方法、衝突防止プログラム、および衝突防止システム
【課題】通信範囲内に多数の車両が存在しても円滑な通信を行うことができる衝突防止装置、衝突防止方法、衝突防止プログラム、および衝突防止システムの提供。
【解決手段】車両が所定の範囲に進入した場合に車両の走行状況を示す走行情報を受信し、または車両が他車両と衝突の可能性がある旨の判定結果を所定の範囲に進入した他車両に送信する路側通信部と、交差点情報と、車両が交差点に進入した場合に車両同士が衝突の可能性を判定する衝突可能性判定条件とを記憶する路側記憶部と、路側通信部が車両から走行情報を受信した場合に、受信した走行情報と、道路情報と、交差点情報とに基づいて車両が進入した交差点を特定し、受信した走行情報と衝突可能性判定条件とに基づいて、特定した交差点において車両が他車両と衝突の可能性があるか否かを判定し、車両が他車両と衝突の可能性があると判定した場合にのみ判定結果を出力する衝突可能性判定部とを備える。
(もっと読む)
運転支援システム
【課題】運転支援の必要がない状況になった際に速やかに運転支援を終了させる。
【解決手段】ハンドル角センサ11、車速センサ12、ターンシグナルスイッチ13、ブレーキスイッチ14の情報により、運転者の意思に基づいて自車両が支援システムの当該路から外れたことを退出判断部7で認識した時に、判断部6によりカーナビ部5への表示を停止させる。
(もっと読む)
衝突予測装置
【課題】従来に比して衝突の誤判定を低減した衝突予測装置を提供する。
【解決手段】自車両に搭載され、当該自車両と他車両との衝突を予測する衝突予測装置であって、自車両の周囲に電磁波を送信し、他車両から反射された当該電磁波の反射波を受信することによって当該他車両の走行情報を検出する他車両情報検出手段と、他車両の走行情報が検出された場合、自車両と他車両との衝突の危険性が高いか否かを当該走行情報に応じて判定する衝突判定手段と、自車両周辺が渋滞しているか否かを判定する渋滞状況判別手段と、渋滞状況判別手段の判定結果に応じて衝突判定手段の判定感度を低減する感度変更手段とを備える、衝突予測装置である。
(もっと読む)
逆走検出装置
【課題】駐車エリア内において正しい進行方向への走行を促すことができる逆走検出装置を提供する。
【解決手段】逆走検出装置1は、高速道路のサービスエリアSにおいて、駐車中の他車両M1〜M5の駐車方向Y又はサービスエリアSに設けられた駐車線21の延在方向に基づいて、自車両M0の前方の走路Lの正しい進行方向Aを推定する進行方向推定手段と、進行方向推定手段で推定された進行方向Aに対して自車両が逆走方向に走路を走行しようとする場合には、報知を行う報知手段と、を備えたことを特徴とする。
(もっと読む)
1 - 20 / 261
[ Back to top ]