
Fターム[5H180LL17]の内容
交通制御システム (133,182) | 衝突防止 (18,251) | 特定の場所における衝突防止 (1,961) | 車庫、駐車場、ガソリンスタンド等の近傍 (344)
Fターム[5H180LL17]に分類される特許
1 - 20 / 344
駐車支援装置
【課題】運転者が自車両の切り返しの有無を含めた駐車の可否や難易度を直感的に判断することができる駐車支援装置を提供する。
【解決手段】少なくとも自車両後方の撮像映像を取得する映像取得手段9と、この映像取得手段9が取得した撮像映像に自車両の駐車目安枠を重畳して合成映像を表示手段3に出力する画像重畳部13とを備え、画像重畳部13に重畳される自車両の駐車目安枠は、駐車可能な限界領域を示す第1の目安枠と、この第1の目安枠から自車両の進行方向側に延出して駐車の際に自車両の切り返しが必要な領域を示す第2の目安枠とを有することを特徴とする。
(もっと読む)
白線検出装置

【課題】本発明は、白線のエッジ抽出の際の閾値の決定手段(適応制御的なもの)を不要とし、処理を簡素化して、白線両端に生じるエッジのうちの右側を信頼性高く抽出する手法を提供することを目的としている。
【解決手段】このため、走査線方向に隣り合う2つの画素の輝度の差分を算出する差分算出手段と、差分算出手段の差分が予め設定された閾値以上か否かを判定する閾値判定手段と、閾値判定手段で差分が閾値以上と判定された第1の画素から、白線の幅分と定めた画素数だけ走査線方向にずれた位置に、閾値判定手段で差分が閾値以上と判定された第2の画素が存在するか否かを判定する白線幅判定手段とを備え、白線幅判定手段で第2の画素が存在すると判定された場合に、第1の画素あるいは第2の画素を白線のエッジとする。
(もっと読む)
車両用運転支援装置
【課題】駐車区域において、進入路および退出路のうちの少なくともいずれかを走行している場合に限って逆走の警告を行うことを、より容易に可能にする車両用運転支援装置を提供する。
【解決手段】マップマッチング処理でマッチングした場所が、SAPA内の道路に該当していた場合に、位置検出器11で検出した自車両の現在位置をもとに、自車両が走行中の可能性があるSAPAセグメントを取得する。そして、当該SAPAセグメントのネットワークを前後に辿り、探索距離内に本線セグメントが存在するか否かを判定し、探索距離内に本線セグメントが存在すると判定したこと、および位置検出器11で検出した自車両の進行方向に基づいて、自車両が逆走状態であることを判断し、逆走の警告を行う。
(もっと読む)
駐車支援装置
【課題】駐車支援に不慣れな運転者に対しても的確に支援が開始され、運転者がその支援内容を容易に理解することができる駐車支援装置を提供する。
【解決手段】撮影装置12により撮影された周辺画像を取得する画像取得部2と、少なくとも周辺画像を表示装置20に表示させる表示制御部3と、駐車目標位置に駐車する際に複数工程の各工程ごとに規定される運転操作を、文字及び図形の少なくともいずれかにより示す操作ガイドを生成する操作ガイド生成部4と、操作ガイドと対応し、操作ガイドよりも表示面積の小さい操作アイコンを生成する操作アイコン生成部5と、各工程において運転操作が行われない状態で予め設定した時間が経過すると、当該工程の操作ガイドを周辺画像に重畳表示させた状態とし、この状態から運転操作が開始されると、操作ガイドに代えて操作アイコンを重畳表示させた状態とする重畳制御部6と、を備えた。
(もっと読む)
運転支援装置
【課題】駐車の際における障害物の警告を高精度に実行したい。
【解決手段】生成部22は、車両に設置された少なくともひとつの撮像装置によって撮像された画像をもとに、車両周辺の鳥瞰図画像を生成する。予想軌跡記憶部30は、鳥瞰図画像に対応すべき車両の予想軌跡であって、車両のハンドルを操作して車両を移動させる場合の予想軌跡を記憶する。合成部32は、予想軌跡を鳥瞰図画像に重畳して表示させる。設定部38は、鳥瞰図画像に対して、予想軌跡をもとに障害物の検出領域を設定する。警告部36は、設定した検出領域内の障害物を検出した場合に、その旨を警告する。
(もっと読む)
運転支援装置
【課題】運転者に対して、駐車開始を実行する際の位置合わせの精度を向上させるための情報を提供したい。
【解決手段】生成部22は、車両に設置された少なくともひとつの撮像装置によって撮像された画像をもとに、車両周辺の鳥瞰図画像を生成する。予想軌跡記憶部30は、鳥瞰図画像に対応すべき車両の予想軌跡であって、車両のハンドルを操作して車両を移動させる場合の予想軌跡をハンドルの舵角を変えながら複数記憶する。合成部32は、予想軌跡記憶部30において記憶した複数の予想軌跡を鳥瞰図画像に重畳して表示する。
(もっと読む)
走行制御装置および走行制御方法
【課題】複雑に設定された走行経路に沿って車両を問題なく自律走行させることができる走行制御装置および走行制御方法を提供すること。
【解決手段】パターン走行部RT1は、経路パターンPT1〜PT10に対応する走行経路ごとに区切られセクションが設定される。走行制御装置100は、車両1にパターン走行部RT1を自律走行させる場合、車両1に各セクションを第1セクションから順番に、セクション単位で走行させる。よって、車両1が現在走行しているセクションと、他のセクションとが接近していたり、交差している場合でも、車両1が他のセクションを走行し始めることがないので、車両1に現在走行中のセクションを継続して走行させることができる。従って、複雑に設定された走行経路に沿って車両を問題なく自律走行させることができる。
(もっと読む)
走行制御装置および走行制御方法
【課題】車両を自律走行させる場合に車両の搭乗者に与える不快感を軽減できる走行制御装置および走行制御方法を提供すること。
【解決手段】車両1を自律走行させると、運転者を含む搭乗者に前触れもなく、突然切り返しが行われる場合があり、予測の困難な前後Gが車両1の搭乗者に加わることがある。本実施形態の走行制御装置100は、車両1の前進および後退を切り換える切り返し地点に車両1が到着する場合に、車両1の車両速度Vに基づいてクッションタイムを設定する。クッションタイムが設定されると、切り返し地点において車両1が所定時間停車させられるので、車両1が停車している間に、車両1の搭乗者に加わっている前後Gを緩和させることができる。よって、車両1の搭乗者に与える不快感を軽減できる。
(もっと読む)
車両誘導装置
【課題】路面勾配などがある場合でも車両を高精度に誘導できる車両誘導装置を提供することを課題とする。
【解決手段】車両を目的位置まで誘導する車両誘導装置であって、車両周辺を撮像する撮像手段と、車両の目的位置を設定する目的位置設定手段と、車両の現在位置から目的位置までの誘導軌跡を算出する誘導軌跡算出手段と、誘導軌跡に従って車両を誘導する車両誘導手段と、車両誘導中に異なる時刻に撮像された複数の画像に基づいて車両の進行方向を判定する判定手段と、その判定した車両の進行方向に基づいて車両の現在位置を更新する現在位置更新手段を備え、誘導軌跡算出手段は、現在位置更新手段で更新した車両の現在位置から目的位置までの誘導軌跡を算出することを特徴とする。
(もっと読む)
運転支援装置
【課題】切り返しを行わずに最初から駐車枠に平行に駐車を行うことをより容易にできるようにする運転支援装置を提供する。
【解決手段】車載カメラによって撮像された車両後方画像から検出した車幅方向の駐車区画線をもとに、自車両が当該駐車区画線に対して略平行になるタイミングを判定し、駐車枠に自車両が駐車を完了する前において、ステアリングセンサで検出したステアリング角度が所定値以上であった場合であり、且つ、駐車支援ECUでの駐車傾き判定処理で自車両が当該駐車区画線に対して略平行になったタイミングを判定した場合に、表示器に切り戻し案内表示を行う。
(もっと読む)
自動駐車装置
【課題】インフラ設備が不要であり、且つ、自動走行中の演算処理負荷も少ない自動駐車装置を提供する。
【解決手段】車両が駐車完了位置に位置したか否かを判断する駐車完了判断手段102と、自動駐車開始条件が成立したか否かを判断する自動駐車開始判断手段108と、車両の挙動情報を、車両が駐車完了位置に位置したと判断されてから自動駐車開始条件が成立したと判断されるまで逐次取得して、記憶装置120に記憶する挙動情報取得手段104と、自動駐車開始条件が成立した場合に、記憶装置120に記憶されている挙動情報に基づいて、車両が駐車完了位置に位置したと判断されてから自動駐車開始条件が成立したと判断されるまでの車両の移動軌跡を逆方向に車両を自動走行させて、車両を前記駐車完了位置まで移動させる自動走行制御手段110とを備える。
(もっと読む)
駐車支援装置
【課題】車両を後退させて駐車する際に適切な駐車支援を行うことができる駐車支援装置を提供する。
【解決手段】 駐車支援装置のECUは、GPSにより検出された車両位置座標と地磁気センサにより検出された車両前後方位とを読み込み、これらの車両位置座標及び車両前後方位に基づいて車両前後方向と車両進行方向との角度差δを算出する。そして、ECUは、角度差δの絶対値が所定差分閾値A2よりも大きいときは、ガイド線表示フラグをOFFにし、角度差δの絶対値が所定差分閾値A1以上であり且つ所定差分閾値A2以下であるときは、ガイド線表示フラグをONにすると共にガイド線補正フラグをONにし、角度差δの絶対値が所定差分閾値A1よりも小さいときは、ガイド線表示フラグをONにすると共にガイド線補正フラグをOFFにする。
(もっと読む)
走行支援装置および走行支援方法
【課題】少ない処理コストで初期位置から目標位置までの車両の走行経路を運転者に提供できる走行支援装置および走行支援方法を提供すること。
【解決手段】本実施形態では、経路パターンPT1〜PT10の組み合わせに基づいて、2m間隔で大まかに経路点Pを生成し走行経路RT1を生成しても、その後、走行経路RT1の各経路点P間に、0.05m間隔で仮想的に走行制御点Qを生成できる。よって、経路パターンPT1〜PT10に対応する各走行経路の長さCLを短く(例えば、0.05mなど)しておき、詳細に走行経路RT1を生成したり、経路パターンPT1〜PT10のパターンの種類を多数設けて記憶しておく必要が無いので、処理コストを抑制できる。従って、走行支援装置100によれば、少ない処理コストで初期位置から目標位置までの車両の走行経路RT1〜RT3を運転者に提供できる。
(もっと読む)
走行支援装置および走行支援方法
【課題】走行支援する経路上に物体があるかを少ない処理コストで判定できる走行支援装置および走行支援方法を提供すること。
【解決手段】走行制御点Qは、走行経路RT1〜RT3上に仮想的に設けられた点であるので、その走行制御点Qにおける障害物判定領域Eは、実際の走行領域F1の一部である。よって、各走行制御点Qにおける障害物判定領域Eを全て足し合わせた領域を、車両1の走行領域とみなすことができるので、各走行制御点Qごとに、その車両1の障害物判定領域E内に障害物が存在するか否かを判定することで、走行経路RT1〜RT3上に障害物が存在するか否かを判定できる。従って、車両1が実際に走行する走行領域F1を算出しなくて済むので、複雑な領域の計算を行わなくて良く、処理コストを抑制できる。その結果、走行支援する経路上に障害物があるかを少ない処理コストで判定できる。
(もっと読む)
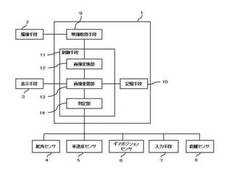
駐車支援装置
【課題】駐車支援装置において、撮像された自車両の後方画像から駐車枠の白線と白線端点とを検出して画像表示の切換タイミングの精度を向上する。
【解決手段】制御手段9は、撮像された自車両の後方画像の歪みを補正して歪み補正画像にする歪み補正手段9Aと、撮像された自車両の後方画像を俯瞰画像に変換する画像変換手段9Bと、変換された俯瞰画像から駐車枠2の白線を検出する白線検出手段9Cと、検出された白線の白線端点を検出する白線端点検出手段9Dと、検出された白線端点と自車両との距離に基づいて表示手段8に表示する画像を歪み補正画像と俯瞰画像とのいずれかに切り換える表示切換制御手段9Eとを備える。
(もっと読む)
走行支援装置
【課題】障害物までの距離を精度良く検出し、適切な停車位置の案内を行うことができる走行支援装置を提供する。
【解決手段】振動センサ10によって検出された実際の振動パターンと、記憶部33に予め記憶された規定パターンとが一致するか否かを振動パターン判断部31が判断する。振動パターン判断部31によって、振動パターンと規定パターンとが一致すると判断された場合には、車両100の走行路上に輪留め300が存在するものとして、報知判断部34がスピーカ40を通じて輪留め300の存在を報知する。これにより、走行路500から入力される実際の振動パターンに基づいて、輪留め300の存在を正確に検出することができ、車両100の運転者に対して、適切な停車位置の報知を行うことが可能となる。
(もっと読む)
運転支援装置
【課題】タイヤの走行予測軌跡を認識できる運転支援装置を提供する。
【解決手段】車両が後退する際に運転者を支援する運転支援装置であって、車両の後方画像を撮像するカメラと、自車両の操舵角を検出する操舵角検出部と、操舵角に応じた自車両のタイヤの進路を算出し、自車両のタイヤの進路に基づく自車両のタイヤのタイヤ幅を後方に延長したタイヤ幅の軌跡の画像を生成し、カメラが撮像した後方画像にタイヤ幅の軌跡の画像を重ねた画像を生成する表示処理部と、表示処理部が生成した画像を表示する表示部と、を備える運転支援装置とする。
(もっと読む)
操縦支援装置
【構成】カメラC_3は、車両に設けられて斜め上方向から地面を捉える。CPU16は、カメラC_3から出力された被写界像P_3を地面に対する鳥瞰画像に変換し、車両の前後方向の姿勢を定義するべく地面に描かれた複数の直線を表す線画像を鳥瞰画像から探索する。発見された線画像に現われた複数の線の平行性がエラー条件に合致する場合、CPU16は、バックギアの選択に応答して表示装置22に表示されるキャラクタ画像を点滅させる。
【効果】鳥瞰変換特性の異常に起因する事故を抑制することできる。
(もっと読む)
車両表示装置および表示方法
【課題】 後方画像に死角が生じていることを知らせることができる「車両表示装置および車両表示方法」を提供する。
【解決手段】 本発明の車両表示装置は、車両後方を撮像しその後方画像を表示するものであって、車両の後方を撮像する撮像カメラ110と、撮像カメラからの撮像データに基づき後方画像をディスプレイ140に表示可能な出力制御部130と、撮像データに基づき自車が斜め駐車されたか否かを判定する駐車方向判定部132と、斜め駐車と判定されたとき後方画像において死角が生じる方向を判定する死角方向判定部134とを有する。出力制御部130は、斜め駐車と判定されたとき、死角方向判定部の判定結果に基づき死角が生じることおよび死角の方向を知らせる表記210、220を、後方画像200上に合成して表示させる。
(もっと読む)
車両周辺画像提供装置
【課題】トップビュー画像のつなぎ目と交差するガイドラインを違和感なく表示させることが可能な「車両周辺画像提供装置」を提供すること。
【解決手段】車両周辺画像提供装置は、表示手段と、複数のカメラと、車両の画像のデータを予め格納する第1の記憶手段と、車両の幅及び車両からの所定の距離を示すガイドラインのデータを記憶する第2の記憶手段と、第1の記憶手段に格納されているデータから車両の画像と車両周辺の画像を合成して表示手段の画面に表示させるように制御する制御手段とを備える。制御手段は、各カメラにより取得された画像間の境界領域に表示されるつなぎ目と交差するガイドラインを表示するとき、ガイドラインの表示位置の画素と表示位置に隣接する画素との輝度差に応じて現れる滲みを含めたガイドラインの表示がつなぎ目の両側でずれのないようにガイドラインの表示位置を調整する。
(もっと読む)
1 - 20 / 344
[ Back to top ]