
Fターム[5H301AA01]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体の可動空間、領域、経路 (2,962) | 陸上 (1,642)
Fターム[5H301AA01]の下位に属するFターム
Fターム[5H301AA01]に分類される特許
1 - 20 / 1,008
無人走行体を用いた環境情報の取得システム
【課題】粉塵、煙又は水蒸気が立ち込める劣悪な環境下においても、無人走行体の遠隔操縦を円滑に行うことができ、かつ構築物内の状況を明確に把握可能な無人走行体を用いた環境情報の取得システムを提供する。
【解決手段】遠隔操縦装置305を用いてオペレータにより遠隔操縦される無人走行体5に、走査式二次元測距装置105及び走査式三次元測距装置106を搭載する。走査式三次元測距装置106の検出データから作成される三次元画像を表示装置302に表示し、無人走行体5を遠隔操縦する際の参照データとして利用する。また、走査式二次元測距装置105の検出データをUSBメモリ306に順次記憶し、このUSBメモリ306に記憶された走査式二次元測距装置105の検出データを合成することにより作成される三次元画像を、構築物内の環境情報として利用する。
(もっと読む)
無人走行体の遠隔操縦システム

【課題】無人走行体の遠隔操縦を過不足なく行うことができ、かつ無人走行体の誤操作を確実に防止可能な遠隔操縦装置を備えた無人走行体の遠隔操縦システムを提供する。
【解決手段】オペレータが操作する遠隔操縦装置として、タッチパネル203,303と手持ちコントローラ205,305の双方を備える。これらの各遠隔操縦装置によって共通に行える無人走行体の操作と、タッチパネル203,303によってのみ行える無人走行体4,5の操作と、手持ちコントローラ205,305によってのみ行える無人走行体の操作とを設定する。
(もっと読む)
無人走行体の遠隔操縦システム
【課題】通常のカメラによっては鮮明な環境情報を取得することが困難な環境に無人走行体が投入された場合にも、無人走行体を正確、容易かつ高能率に遠隔操縦可能な遠隔操縦システムを提供する。
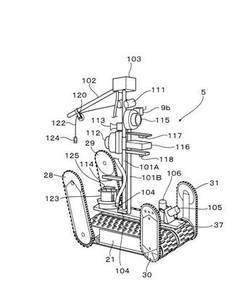
【解決手段】無線無人走行体5に、レーザ光走査式三次元測距装置106と、往路前方カメラ112と、メインカメラ113と、復路前方カメラ115と、俯瞰カメラ118とを搭載する。安全な場所に設置された表示装置に、レーザ光走査式三次元測距装置106により検出された三次元画像と、各カメラ112,113,118により撮影された映像を表示する。オペレータはこれらの三次元画像及びカメラ画像を参照しながら、無線無人走行体5の遠隔操縦を行う。
(もっと読む)
画像処理装置、運転支援装置、画像処理方法及び画像処理プログラム
【課題】移動体が移動する際の安全を確保するための画像処理装置を提供する。
【解決手段】移動体の予測軌道と、三次元モデルにおける移動体の位置及び大きさと、三次元モデルにおける立体物の大きさ及び位置とに基づいて、三次元モデルにおいて予測軌道上で移動体が立体物に接触するか否か判定する接触判定部260を備える。また、ステレオカメラの画像に基づいて距離を測定し、立体物の位置及び大きさを算出する。さらに、算出した横幅の接触量に基づいて予測軌道を変更した上で接触するか否か判定する。
(もっと読む)
無人走行体の遠隔操縦システム
【課題】簡単かつ安価な構成で、無人走行体の活動範囲を延長可能な無人走行体の遠隔操縦システムを提供する。
【解決手段】LANケーブル1を介して接続された第1及び第2の操作卓2,3と、第1操作卓2から出力される制御信号により遠隔操縦される有線無人走行体4と、第2操作卓3から出力される制御信号により遠隔操縦される無線無人走行体5と、第2操作卓3と有線無人走行体4とを接続する通信ケーブル6,7と、通信ケーブル6と通信ケーブル7との間に配置された無線中継装置8と、有線無人走行体4と無線無人走行体5とを接続する無線通信装置9と、通信ケーブル6を巻回したケーブルリール10とをもって、無人走行体の遠隔操縦システムを構成する。
(もっと読む)
無人車両
【課題】誘導ラインが途中で断線していたとしても、姿勢角を修正しながら安定して走行し続けることができる無人車両を提供する。
【解決手段】本発明に係る無人車両10は、車長方向に延びる車体中心線上に離間して設けられ、路面の画像データをそれぞれ出力する第1撮像手段11aおよび第2撮像手段11bと、画像データに基づいて姿勢角を算出する姿勢角算出部13と、姿勢角が目標値になるように車輪15の操舵角を制御する操舵制御部14とを備える。姿勢角算出部13は、第1撮像手段11aおよび第2撮像手段11bから出力された2つの画像データにおける誘導ラインの位置に基づいて姿勢角を算出する第1算出動作、および第1撮像手段11aまたは第2撮像手段11bから出力された1つの画像データにおける誘導ラインの位置に基づいて姿勢角を算出する第2算出動作を選択的に行う。
(もっと読む)
無人走行体を用いた環境情報の取得システム
【課題】粉塵、煙又は水蒸気が立ち込める劣悪な環境下においても鮮明な環境情報を取得可能な無人走行体を用いた環境情報の取得システムを提供する。
【解決手段】遠隔操縦装置305を用いてオペレータにより遠隔操縦される無人走行体5に、走査式二次元測距装置105と、前方監視用の光学カメラ(メインカメラ)113を搭載する。また、安全な場所には、遠隔操縦装置305を備えた制御装置本体301を設置する。制御装置本体301は、遠隔操縦装置305の操作内容に応じた制御信号を出力して無人走行体5の走行制御を行いながら、走査式二次元測距装置105の検出データを1走査毎に、制御装置本体301に接続されたUSBメモリ306に記憶する。また、光学カメラ113の撮影映像もUSBメモリ306に記憶する。
(もっと読む)
無人走行体を用いた環境情報の取得システム
【課題】粉塵、煙又は水蒸気が立ち込める劣悪な環境下においても構築物内の環境を正確に取得可能な環境情報の取得システムを提供する。
【解決手段】遠隔操縦装置を用いてオペレータにより遠隔操縦される無人走行体5に、走査式二次元測距装置105と、放射線検出器116を搭載する。また、安全な場所には、遠隔操縦装置を備えた制御装置本体を設置する。制御装置本体は、遠隔操縦装置の操作内容に応じた制御信号を出力して無人走行体5の走行制御を行いながら、走査式二次元測距装置105の検出データから生成される三次元画像と、放射線検出器116の検出データを合成し、制御装置本体に接続された表示装置に表示する。
(もっと読む)
無人走行体の遠隔操縦システム
【課題】往路走行モード選択時における遠隔操縦装置の操作感と、復路走行モード選択時における遠隔操縦装置の操作感とを共通化し、無人走行体の遠隔操縦性を高める。
【解決手段】手持ちコントローラ205,305に、無人走行体4,5の走行モードを往路走行モード又は復路走行モードに切り換える前後進切換スイッチ410,411と、無人走行体4,5の走行方向を指示するジョイスティック408を備える。無人走行体の走行モードを往路走行モードから復路走行モードに切り換えたとき、表示装置202,302の第1表示部211,311に表示される映像を、往路前方撮影カメラの撮影映像から復路前方撮影カメラの撮影映像へと切り換える。また、往路走行モードへの切換時と復路走行モードへの切換時とで、手持ちコントローラ205,305の操作内容に応じた無人走行体4,5の動作を同一に保つ。
(もっと読む)
遠隔操縦車両システム
【課題】通信データ量を軽減して、遠隔操作部での表示遅れを防止する。
【解決手段】遠隔操縦車両100では、点群高さデータaと位置情報Lを基に、三次元マップ生成部104が三次元マップデータcを順次生成して出力する。差分抽出演算部106は、最新の三次元マップデータcと、一つ前の三次元マップデータcとの差分演算をして差分三次元マップデータc1を出力する。差分三次元マップデータc1と位置情報Lは、送受信部107から無線送信され、遠隔操作部200の送受信部201で受信される。差分三次元マップデータc1は、三次元マップ再生部202で順次加算されて再生三次元マップデータc2となる。画面生成部205では、記憶装置203に記憶された再生三次元マップデータc2と、地図データベース204から取り出した地図画面データGとを合成して表示画像データdを生成する。モニタ206には表示画像データdが表示される。
(もっと読む)
無人走行体の遠隔操縦システム
【課題】2台の無人走行体を容易かつ安定に遠隔操縦することが可能な無人走行体の遠隔操縦システムを提供する。
【解決手段】第1の表示装置202を第2の表示装置302の左側に配列し、第1の表示装置202の駆動制御画面210中に表示される撮影カメラ85,86の撮影映像を、駆動制御画面210の右側辺に沿って設けられた表示部211に表示すると共に、第2の表示装置302の駆動制御画面310中に表示されるメインカメラ113の撮影映像を、駆動制御画面310の左側辺に沿って設けられた表示部311に表示する。
(もっと読む)
サービス制御システム、サービスシステム
【課題】機械が実世界の状態に基づき実世界に対し有用な働きかけを行うサービスシステムにおいて、環境条件や目的等が変化したときでも、その働きかけがより適切なものとなるように変化させる。
【解決手段】本発明に係るサービス制御システムは、実世界インターフェースシステムが備える第1観測部とは異なる物理環境を観測する第2観測部を備え、実世界インターフェースシステムが第1観測部の観測結果に基づき動作した場合と第2観測部の観測結果に基づき動作した場合との間の差分が小さくなるように、実世界インターフェースシステムの動作を調整する。
(もっと読む)
倒立型移動体、その制御方法、及びプログラム
【課題】小型の抵抗に維持しつつ回生電力を効果的に消費すること。
【解決手段】倒立型移動体は、姿勢情報を検出する姿勢検出手段と、車輪を駆動する駆動手段と、姿勢検出手段により検出された姿勢情報に基づいた値に第1制御ゲインを乗算して駆動手段を駆動するための第1制御信号を生成する第1制御手段と、姿勢検出手段により検出された姿勢情報に基づいた値に第2制御ゲインを乗算して駆動手段を駆動するための第2制御信号を生成する第2制御手段と、回生電圧が所定閾値以上であるか否かを判定する判定手段と、を備える。駆動手段は、第1制御手段から出力される第1制御信号と、第2制御手段から出力される第2制御信号と、に基づいて前記車輪を駆動する。第1及び第2制御手段は、判定手段により回生電圧が所定閾値以上であると判定されたとき、第1及び第2制御ゲインのうち一方の符号を反転させて、第1及び第2制御ゲインを変更する。
(もっと読む)
群集の知能ロボットを用いた地図構築方法及びその装置
【課題】各ロボットからの情報を融合して環境地図全体を生成できる装置を提供する。
【解決手段】地図を作成しようとする探索範囲を自律走行する各ロボット間の相対位置を検出204、検出された相対位置に基づいて各ロボット別の探索区域を分割206、各ロボットから地図の生成のために用いられる探索区域に対するローカル情報をそれぞれ獲得208した後、これらの情報を融合して環境地図全体を生成210するようにすることで、インフォーマルな環境で地図の作成のための探索範囲を縮小して探索時間が過度にかかるのを効果的に抑制でき、選択的なマッチングを通じて各ロボットから獲得したローカル情報202の併合時間を低減できる。
(もっと読む)
姿勢角度演算装置、姿勢角度演算方法、及びプログラム
【課題】低コストかつ高精度に姿勢角度を算出すること。
【解決手段】姿勢角度演算装置は、角速度を検出するジャイロセンサ及び加速度を検出する加速度センサを備え、ジャイロセンサにより検出された角速度と、加速度センサにより検出された加速度と、に基づいて姿勢角度を算出している。ジャイロセンサ及び加速度センサのうち少なくとも一方は、同一箇所及び同一方向を計測する、計測域の異なる複数のセンサで構成されている。姿勢角度演算装置は、計測域の異なる複数のセンサから夫々出力される信号に基づいて、姿勢角度を算出する姿勢角演算手段と、を備えている。
(もっと読む)
走行ロボット
【課題】巻取装置を使用して急傾斜の階段でも安定した昇降が可能であり、且つ階段の踊り場のような狭い場所でも旋回が可能な走行ロボットを提供する。
【解決手段】階段200を上昇又は下降するときに、ワイヤ7若しくはケーブル70の一端を階段200の上方部に固定し、車体1が階段200を降下するときはワイヤ7若しくはケーブル70を送り出し、車体1が階段200を上昇するときはワイヤ7若しくはケーブル70を巻取るように巻取装置5を制御し、且つ、角度検出器9が検出した車体1の角度に基づいて巻取りの停止及び巻取りの開始を制御するようにした。
(もっと読む)
ロボット操作入力用グリップ及びそれを備えた案内用ロボット
【課題】被案内者が手首を捻らずに把持して入力操作を行うことが可能なロボット操作入力用グリップと、そのロボット操作入力用グリップを備える案内用ロボットを提供する。
【解決手段】基体2の上面に取り付けられ、且つ被案内者によるロボット操作入力用グリップ26への入力操作を検出する入力操作検出部と、入力操作検出部が検出した入力操作に応じて基体2を移動させるための駆動力を発生する移動用アクチュエータを備えた案内用ロボット1であって、ロボット操作入力用グリップ26が備えるグリップ本体部30は、入力操作検出部よりも上方に配置されており、グリップ本体部30が備える十個所のグリップ側凹部32は、グリップ本体部30を回転軸の方向から見て、少なくとも案内用ロボット1の前進方向を含む方向へ放射状に伸びている。
(もっと読む)
推定装置、推定方法、および推定プログラム
【課題】移動体が特定の領域に位置する場合の推定精度の向上を図ること。
【解決手段】推定装置は、粒子フィルタを用いたシミュレーションにより、直前の移動体の状態を示す粒子群から、現在の移動体の状態を示す粒子群psを推定する。次に、推定装置は、推定された現在の移動体の状態を示す粒子群psに加えて、危険領域Dの近傍領域の状態を示す心配粒子群asを生成する。そして、推定装置は、推定された粒子群psと生成された心配粒子群asとの各粒子の尤度に基づいて、粒子群psをリサンプリングする。これにより、推定装置は、移動体の真の位置が危険領域の近傍領域にある場合に、移動体の位置の推定精度の向上を図ることができる。
(もっと読む)
走行装置
【課題】自律歩行が困難な歩行者を安全に先導することができる歩行支援装置を提供する。
【解決手段】移動方向を入力する操作入力部17を有するとともに、走行部を有して任意の方向に走行可能な自走体2と、前記操作入力部で入力された移動方向に基づいて前記自走体の走行を制御する走行制御手段51と、前記自走体の周囲の障害物の位置を検出する障害物検出手段52と、前記障害物検出手段で検出した障害物の位置情報と前記走行制御手段の指令値とに基づいて自走体の前記障害物への接触の有無を判定する障害物接触判定手段53と、該障害物接触判定手段の判定結果に基づいて前記走行制御手段の走行方向を補正する走行方向補正手段54とを備えている。
(もっと読む)
車輪型ロボット
【課題】基体の傾斜や転倒を抑制することが可能な、車輪型ロボットを提供する。
【解決手段】被案内者が把持する把持部を取り付けた基体の水平面に対する傾斜角度を検出する基体傾斜角検出部112と、基体と把持部への入力に応じて基体を移動させる移動部とを、基体傾斜角検出部112が検出した傾斜角度が減少するように、平面視で直交する二つの軸回り方向へ相対移動可能に連結するロールピッチ機構を駆動させるロールピッチ機構駆動部の駆動状態を制御するロールピッチ機構駆動制御部114と、把持部への入力に応じて基体を移動させる駆動輪が走行する走行路の路面と基体との距離である路車間距離が予め設定した許容距離を超えていると判定すると、駆動輪を駆動させる走行用モータの駆動状態を駆動輪が停止するように制御する走行用モータ駆動制御部110を備える。
(もっと読む)
1 - 20 / 1,008
[ Back to top ]