
Fターム[5H301AA10]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体の可動空間、領域、経路 (2,962) | 所定の空間、領域を自由に移動可能なもの (867)
Fターム[5H301AA10]に分類される特許
41 - 60 / 867
重心角推定方法及び同方法によって制御される倒立車輪型走行体
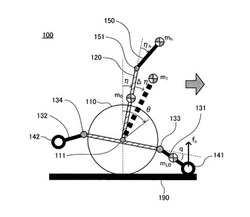
【課題】倒立車輪型走行体において、必要最小限のセンサを用いて、倒立状態及び補助輪接地状態の両状態における重心角(搭乗者や搭載物と倒立車輪型走行体との合成重心角)を推定する方法を提供する。
【解決手段】補助輪が接地せず駆動輪のみで倒立する倒立状態と補助輪が接地する補助輪接地状態とを有する搭乗可能な倒立車輪型走行体について、倒立状態及び補助輪接地状態の各運動方程式に基づいて状態オブザーバを設計し、補助輪接地状態の状態オブザーバの状態方程式にはアフィン項を導入し、倒立状態及び補助輪接地状態の各状態オブザーバを用いて、両状態での搭乗者又は搭載物に起因する倒立車輪型走行体全体の重心角の変動分及び外乱、及び補助輪接地状態での床反力を推定する。
(もっと読む)
ロボットの運動予測制御方法と装置

【課題】状態推定の計算量やデータ通信の所要時間の影響を受けることなく、ロボットごとに決められた制御周期で制御指令値を算出し、複数のロボットを制御することができるロボットの運動予測制御方法と装置を提供する。
【解決手段】(A)ロボット1の制御周期に依らない任意のタイミングで、計測装置12、状態推定装置14、及びデータ記憶装置16により、対象物やロボット1のセンサ情報を取得し、センサ情報と同時刻の各ロボット1の内部状態Xを予測し、センサ情報と比較して内部状態を更新し、更新した内部状態Xと予測に用いた状態遷移方程式f(X)を記憶し、(B)複数のロボット制御装置20により、データ記憶装置16に記憶された最新の内部状態Xに基づき、各ロボット1の制御周期で、各ロボット1に必要な予測値を予測し、複数のロボット1をリアルタイムに制御する。
(もっと読む)
地図処理方法及びプログラム、並びにロボットシステム
【課題】地図処理方法及びプログラム、並びにロボットシステムにおいて、複数の推定器が推定した位置姿勢を高精度に統合することを目的とする。
【解決手段】互いに異なるセンサからの入力に基づいて自己位置を推定する複数の推定器の信頼度をこれらの推定器に対応する信頼性評価モデルを用いて評価する評価処理と、これらの複数の推定器からの推定結果に対して信頼性に応じた異なる統合処理を行う結合処理をコンピュータに実行させるように構成する。
(もっと読む)
自律移動システム、その制御方法及びプログラム
【課題】距離検出手段の揺動範囲を適切に設定し、最適に障害物を検知できる自律移動システム、その制御方法及びプログラムを提供すること。
【解決手段】自律移動システムは、移動体に設けられ、検出領域内の障害物の距離を検出する距離検出手段と、距離検出手段の検出領域をヨー方向へ揺動させる揺動手段と、揺動手段の揺動を制御する揺動制御手段と、を備えている。また、揺動制御手段は、障害物の位置に応じて、揺動手段を制御して距離検出手段の検出領域の揺動範囲を制限している。
(もっと読む)
清掃ロボットの制御システムおよび制御方法
【課題】標示体を特定の領域に固定する必要がない掃除ロボットの制御システムおよび制御方法を提供する。
【解決手段】少なくとも1つの標示体と、当該標示体の位置を検出および記録して記録結果を生成し、かつ当該生成された記録結果をロック(lock)するロック機能を備える清掃ロボットとを含む清掃ロボットの制御システムであって、当該ロック機能が起動されると、当該清掃ロボットは当該記録結果に基づいて清掃動作を実行し、当該ロック機能が起動され、かつ当該標示体が取り除かれたとき、当該清掃ロボットは、当該標示体の取り除かれる前の位置に基づいて当該清掃動作を実行する。
(もっと読む)
経路探索機能付き移動体
【課題】地図データ上で自己位置と最終目標点が特定されたときに、自己位置から移動可能範囲内を伸びて最終目標点に至る大域経路を計算する技術が知られている。障害物を検出したときに、障害物を回避しながら最終目標点に至る経路を計算する技術も知られている。しかしながら両者を融合する技術が未解決であり、障害物を回避してから大域経路に復帰する経路がうまく計算できない。
【解決手段】障害物回避経路計算手段で用いる最終目標点に代えて中間目標点を用いる。障害物よりも遠方にある大域経路上の点を中間目標点とすると、障害物を回避してから大域経路に復帰する経路を計算できる。
(もっと読む)
人工衛星の姿勢決定装置および人工衛星の姿勢決定方法
【課題】人工衛星に搭載された複数のセンサデータを用いて、人工衛星の直流から高周波成分までの姿勢変動を広帯域に決定する。
【解決手段】姿勢センサ(1)と低周波角速度センサ(2)と高周波角速度センサ(3)とが搭載された人工衛星から、各センサの観測データを取得し、人工衛星の姿勢決定値を出力する装置であって、姿勢センサによる姿勢観測値と、低周波角速度センサによる低周波角速度観測値を用いて低周波姿勢決定値を求める低周波姿勢決定部(5)と、低周波角速度センサによる低周波角速度観測値と、高周波角速度センサによる高周波角速度観測値とをミキシングして、姿勢決定の対象区間内の周波数域において平坦なゲイン特性と位相特性を有する広帯域角速度を求める相補フィルタ部(6)と、低周波姿勢決定値と広帯域角速度とを用いて広帯域姿勢決定値を求める広帯域姿勢決定部(7)とを備える。
(もっと読む)
地図処理方法及びプログラム、並びにロボットシステム
【課題】地図処理方法及びプログラム、並びにロボットシステムにおいて、独立して作成された複数の地図の座標系が異なる場合であっても、高精度にこれら複数の地図の座標系を統合することを目的とする。
【解決手段】ロボットの第1のセンサの計測情報に基づき予め生成された第1の地図と、ロボットの各位置での第1のセンサの計測情報とに基づいて第1の地図上の自己位置を推定し、第2のセンサの計測情報に基づき予め生成された第2の地図と、各位置での第2のセンサの計測情報とに基づいて第2の地図上の自己位置を推定し、ロボットの第1の地図上の第1の移動軌跡と第2の地図上の第2の移動軌跡とに基づいて予め算出された、前記第1の移動軌跡の第1の座標系を前記第2の移動軌跡の第2の座標系へ非線形マッピングする座標変換パラメータに基づいて、推定されたロボットの第1の地図上の自己位置を第2の地図上の自己位置に変換するように構成する。
(もっと読む)
電気掃除機
【課題】床面上の障害物へのサイドブラシの引っ掛かりにより走行不能となることを防止できる電気掃除機を提供する。
【解決手段】電気掃除機11は、床面Fに接地するブラシ毛32bを備えるサイドブラシ18を、本体ケース12の下部の吸込口の前方に旋回可能に有する。電気掃除機11は、本体ケース12よりも下方に自律走行の妨げとなる敷物Rがあるかどうかを検出する障害物検出手段21を有する。電気掃除機11は、本体ケース12よりも下方に自律走行の妨げとなる敷物Rがあることを障害物検出手段21により検出したときにサイドブラシ18を上方へと退避させる制御手段を有する。
(もっと読む)
衝突防止機能付き車両
【課題】障害物との衝突を防止しつつ、必要以上に車両の運動が制限されないことを可能とする。
【解決手段】 この車両は、入力された目標速度及び目標進行方向で車体50が所定時間だけ移動するときに車体が通過すると予測される車体通過予測領域と、障害物検知部で検出された障害物の位置とから、車体と障害物とが衝突するか否かを判定する。そして、車体と障害物とが衝突すると判定されるときは、入力部への入力に応じた目標速度及び目標進行方向の少なくとも一方を修正する。車体通過予測領域は、予め設定された車体モデル70に基づいて算出され、その車体モデル70は入力された目標速度及び目標進行方向に応じて変化する。
(もっと読む)
移動体
【課題】異常の発生に伴って電源が切られるなどして通常でない状態に陥ったロボットが、作業が可能な状態になるまでには、コントローラのOSの起動待ちや各種データの読み込み、センサや移動機構の動作確認などの準備が必要であり、多くの時間を要する。本発明ではこれらの準備に要する時間を短縮し、ロボットの作業可能な状態への復帰の迅速化を課題とする。
【解決手段】ロボットが再起動される際に、コントローラやセンサの状態を判定し、異常な状態にないコントローラやセンサは再起動しないようにして、再起動するデバイスを可能な限り減らすことで起動に要する時間を短縮する。
(もっと読む)
移動体の障害認識方法及び障害認識システム
【課題】精度良く障害を認識することができる移動体の障害認識方法を提供する。
【解決手段】本発明の一形態に係る移動体の障害認識方法は、移動体の障害認識方法であって、移動体の路面データ取得手段で少なくとも高さデータを含む路面データを取得するステップと、取得した路面データを高さ順に並べ替えるステップと、並べ替えた路面データの変化点を抽出するステップと、変化点を境に障害を認識するステップと、を備える。これにより、精度良く障害を認識することができる
(もっと読む)
自走式作業機の遠隔操作装置
【課題】オペレータの直進操作の負担を軽減することができる自走式作業機の遠隔操作装置を提供する。
【解決手段】それぞれ独立して駆動制御される左側及び右側の走行体を有する自走式作業機の遠隔操作装置であって、遠隔操作装置20の本体21と、遠隔操作装置の本体21の左側面に設けた左前進スイッチ24と、遠隔操作装置の本体21の左側面に設けた左後進スイッチ25と、遠隔操作装置の本体21の右側面に設けた右前進スイッチ27と、遠隔操作装置の本体21の右側面に設けた右後進スイッチ28とを備える。
(もっと読む)
車両遠隔操作装置、車両遠隔操作方法及びプログラム
【課題】車両と障害物との接触を回避しつつ、当該車両を遠隔から安全に操作する。
【解決手段】車両30を移動させる際に、まず、車両の現在の位置と、目標位置との間の軌跡を算出する(ステップS204)。次に、算出した軌跡に沿って、車両を駐車スペースPSから目標位置まで移動させる(ステップS208,S210)。その際、撮影装置21から出力される画像情報によって規定される画像に対して、車両の軌跡上に位置する障害物の検出を行う(ステップS207)。そして、車両の軌跡上に障害物が検出された場合に、車両の移動を停止する(ステップS209)。
(もっと読む)
歩行ロボット装置及びその制御プログラム
【課題】環境地図の作成と自己位置推定を、求められる精度を確保しつつ、安価に実現することのできる歩行ロボット装置及びその制御プログラムを提供する。
【解決手段】環境地図を作成する機能は、2ヶ所において撮影した地図作成用環境画像から撮影対象物を示す代表点を抽出し、代表点の位置と撮影した位置座標とから撮影対象物の位置座標を求め、撮影した地図作成用環境画像、代表点の位置及び前記撮影対象物の位置座標とを関連付けた環境地図を作成する。自己位置を推定する機能は、任意の位置座標において撮影した位置推定用環境画像中の撮影対象物の代表点に、対応する地図作成用環境画像中の撮影対象物の位置座標を対応させ、交会法によって前記歩行ロボット装置の自己位置を算出する。
(もっと読む)
車両および車両制御プログラム
【課題】自車両の走行を自動で制御しつつ、搭乗者の意思に沿って走行経路を決定できる車両および車両制御プログラムを提供すること。
【解決手段】車両1が、予め設定された走行軌道に沿って自動走行を行っている場合に、搭乗者がジョイスティック13を傾斜操作すると、走行制御装置100は、その傾斜方向(操作角度δ)に基づいて進行すべき道路を選択し、その道路へ進入するための走行軌道を走行軌道メモリ93bに格納する。これにより、搭乗者の意思に基づいて指示された車両1の進行すべき方向に基づいて走行軌道が設定され、その走行軌道に沿って車両1の走行を制御できる。よって、自車両の走行を自動で制御しつつ、搭乗者の意思に沿って走行軌道を決定できる。
(もっと読む)
車両および車両制御プログラム
【課題】搭乗者の進行したい方向を正確に汲み取りながら走行予定軌道を選択して自動走行を行うことができる車両および車両制御プログラムを提供すること。
【解決手段】第3車両位置予測処理(S107)によって、ステアリングホイール13の回転角速度Δδを取得してステアリングホイール13の操舵角を算出し、そのステアリングホイール13の操舵角から前輪2FL,2FRへ付与される操舵角を算出して、その前輪2FL,2FRへ付与される操舵角と車両速度とに基づいて車両1のヨーレートを推定し、その推定したヨーレートから所定時間後の車両位置を予測する。これにより、搭乗者の進行したい方向を、所定時間後の車両位置まで特定して把握しているので、予測された車両位置に基づいて走行軌道を選択することによって、搭乗者の進行した方向を正確に汲み取りながら走行予定軌道を選択して、自動走行を行うことができる。
(もっと読む)
汚れ検出手段を組み込んだ清掃走行経路ガイド方法
【課題】汚れ検出手段を組み込んだ清掃走行経路ガイド方法を提供することを課題とする。
【解決手段】汚れ検出手段を組み込んだ清掃走行経路ガイド方法であって、自動清掃装置で実行され、清掃経路を生成して自動清掃装置に未清掃領域の清掃をガイドするために用いられ、未清掃領域内で複数の格子を定義できる。該方法は、まず未清掃領域において自動清掃装置を移動させて汚れを清掃し、また、掃除したゴミ量を継続して検出することで、現位置格子の汚れ具合を取得する。現位置格子の汚れ具合が閾値を超えた時、格子を汚れ格子としてマークする。アルゴリズムを実行し、マークした汚れ格子に基づき、全ての汚れ格子を通過できる最短経路を探索して清掃経路とする。最後に、清掃経路に基づき自動清掃装置が移動して各汚れ格子を通過させ、順番通り各汚れ格子を清掃することである。
(もっと読む)
カメラ付スキーロボット
【課題】
赤外線対人検知式自動追尾型カメラを支持し、ラジオコントロール操作により、被写体スキーヤーと共に滑りながら、優れた映像を撮影することを可能とした、スキーロボットを提供する。
【解決手段】
駆動装置を内蔵する箱型のケース本体の底部には、先端が筒体となっている左右それぞれ2本の足を設け、スキー板の上面に固定されている棒状の門型支持具の水平部の棒体が前記筒体に回転自在に貫通し、該水平部の棒体の中央部から、頂部に筒部を形成する垂直支持体を垂設し、前記ケース本体の上方側面を貫通する貫通孔に貫通するコの字状の棒体が前記筒部に回転自在に嵌合し、前記ケース本体の上部に、赤外線対人検知式自動追尾型カメラを設けるとともに該ケース本体の後方部に先端が鋸刃状の鍬状体を設けてなるカメラ付スキーロボットとして課題を解決している。
(もっと読む)
遠隔操作用マーキング装置
【課題】マーキング部の位置決めを的確に行う上で有利な遠隔操作用マーキング装置を提供する。
【解決手段】遠隔操作用マーキング装置200は、被マーキング位置にマーキングを行うマーキング部12と、作業車両110で支持されマーキング部12を移動させるマーキング部用移動機構14とを備える。マーキング部用移動機構14は、遠隔操作によってガイド部材20を旋回させる旋回機構18と、直線状に延在するガイドロッド2002と、マーキング部12を支持すると共に、ガイドロッド2002にその延在方向に沿って移動可能に支持された移動体22と、移動体22をガイドロッド2002に沿って移動させる移動体用移動機構24とを備えている。
(もっと読む)
41 - 60 / 867
[ Back to top ]