
Fターム[5H301AA10]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体の可動空間、領域、経路 (2,962) | 所定の空間、領域を自由に移動可能なもの (867)
Fターム[5H301AA10]に分類される特許
141 - 160 / 867
無人搬送車および走行制御方法
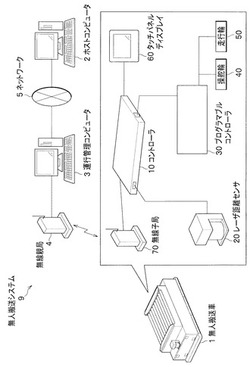
【課題】番地による移動場所の指定を用いつつ、座標系による走行が可能な無人搬送車および走行制御方法を提供することを目的とする。
【解決手段】レーザにより周辺環境の状況を計測して、地図データ122と計測により得られる計測データ121とをマッチングして、現在位置を求め、求められた現在位置を基に、予め設定されている経路データ123に沿って走行する無人搬送車1であって、無人搬送車1が走行する走行エリアにおける所定の場所である番地と、走行エリアに設定されている座標との対応情報を格納しているデータメモリ120と、ホストコンピュータ2から移動の目標位置を番地で指定されると、番地および座標の対応情報を基に、指定された番地を座標に変換し、番地に対応する座標まで、経路データ123に従って無人搬送車1を走行させる処理部111と、を有することを特徴とする。
(もっと読む)
障害物回避支援装置、障害物回避支援方法及び移動体

【課題】最近接距離の点の切り替わりが発生する状況において、移動体の障害物の回避動作を支援するのに好適な障害物回避支援装置、障害物回避支援方法及び障害物回避支援装置を備えた移動体を提供する。
【解決手段】障害物回避支援部101を、レーザーレンジセンサ200で測定した障害物の距離情報をメモリに記憶する距離情報記憶部110と、メモリに記憶された距離情報に基づき斥力を計算する斥力計算部111と、計算された斥力を軸方向の成分に分離する斥力成分分離部112と、分離された軸成分から軸毎に正方向の最大値と負方向の最大値とを抽出し、軸毎に抽出した正方向と負方向の最大値の和を計算し、計算結果を各軸の軸成分とした回避用斥力を生成する回避用斥力生成部113とを含む構成とした。
(もっと読む)
方向装置およびそれを用いた動作システム
【課題】掃除ロボットを制御する方向装置、およびそれを用いた動作システムを提供する。
【解決手段】掃除ロボットの走行ルートを制御する方向装置であって、前記掃除ロボットによって発せられ、エンコードされた無線信号を受ける受信ユニット、少なくとも1つの無線信号を発する送信ユニット、および前記受信ユニットが前記エンコードされた無線信号を受けた時、前記掃除ロボットの走行ルートを制御する第1の方向無線信号を発するように前記送信ユニットを有効にする制御ユニットを含むことを特徴とする方向装置を採用した。
(もっと読む)
退避場所探索システム、退避場所探索方法
【課題】迫り来る障害物との接触を回避すべく道を譲るために寄り添うべき退避壁面を探索する技術を提供する。
【解決手段】迫り来る台車250(障害物)との接触を回避するためにロボット100(自律移動体)が退避すべき退避場所を探索する退避場所探索システムは、ロボット100の周囲の壁面の平面視形状を測定するレーザレンジファインダ4(壁面形状測定手段)と、レーザレンジファインダ4による測定結果に基づいて、平坦でかつ所定の平面視長さを有する退避壁面Mを探索する退避壁面探索部130(退避壁面探索手段)と、を備えている。所定の平面視長さは、ロボット100の平面視における投影面積の最大幅以上に設定される。
(もっと読む)
移動機械の移動方法
【課題】移動機械および移動機械周囲の状況を常に把握しつつ当該移動機械を移動すること。
【解決手段】複数の移動機械1A,1Bを用い、全ての前記移動機械1A,1Bにおいて、任意の移動機械1B(1A)により他の1つの移動機械1A(1B)を包含する空間情報を取得し、当該空間情報に基づいて前記他の1つの移動機械1A(1B)を移動させる。これにより、移動機械1A,1Bおよび移動機械1A,1B周囲の状況を常に把握しつつ当該移動機械1A,1Bを移動することができる。
(もっと読む)
無人搬送車
【課題】床面の案内手段を必要とせずに簡素な構成で所定経路を自走でき、取り扱いに対して柔軟性を有する無人搬送車を提供する。
【解決手段】本無人搬送車1は、その搬送車本体1aの前方に突設され、駆動輪5に対して左右方向のいずれか一方にオフセットさせて配置される方向転換用ローラ7と、搬送車本体1aの側方に前端及び後端の2箇所突設され、壁20との接触により無人搬送車1を壁20に沿って自走させる各壁並進用ローラ10、11とを備えているので、床面の案内手段を必要とせずに簡素な構成で所定経路を自走でき、取り扱いに対して柔軟性を有するようになる。
(もっと読む)
移動体
【課題】 検出した表面形状に対応する表面形状データをより正確に特定し、自己の位置情報をより正確に修正することができる移動体を提供する。
【解決手段】障害物の床面と平行な方向における表面形状をグローバル座標系により表す表面形状データを複数個記憶する記憶部と、移動体の位置及び角度をグローバル座標系により算出する自己位置・角度算出部と、光線を走査して、その走査面上に存在する障害物の床面と平行な方向における表面形状を相対座標系により検出する障害物検出部と、移動体の位置及び角度並びにこれらの誤差と、検出された表面形状及びその誤差に基づいて、検出された表面形状に対応する表面形状データを特定するマッチング部と、検出された表面形状とマッチング部で特定された表面形状データとのずれから、移動体の位置及び角度を修正する自己位置・角度修正部を有する移動体。
(もっと読む)
画像処理装置及び移動体位置推定方法
【課題】周囲の状況に関わらず自己の位置の推定精度を向上させる。
【解決手段】予め周囲地図記憶部11に記憶された移動体の周囲の特徴情報22と当該特徴情報22の位置情報21とを取得し、地図内面構造設定部12が複数の特徴情報22を含む領域の面構造を設定し、地図内特徴点可視性判断部13が、面構造によって、移動体の位置から特徴情報22が撮像不能である場合に、当該特徴情報を可視性がないと判定し、自己位置推定部15が、移動体の周囲の特徴情報22のうち可視性がないと判定された特徴情報22を除いて、取得された特徴情報22及び位置情報21と自己の位置から撮像した撮像画像内の実特徴とに基づいて、移動体の位置を推定する。
(もっと読む)
ルート決定システムおよび移動装置
【課題】予め定められた複数のラインによって構成されるルートに沿って移動する移動装置において、所望の移動ルートを決定できるルート決定システムを提供する。
【解決手段】ルート決定システムは、複数のラインによって構成されるルートに沿って移動する移動装置に設けられる。ルート決定システムは、複数のラインを記憶しておき、カメラで標識を撮影し(S11)、その内容を認識し(S12)、ライン情報と、認識した標識とから、複数のラインによって構成されるルートを移動可能なルートの決定を行なう(S13)。
(もっと読む)
移動ロボット
【課題】移動中に繰り返し取得される障害物センサのデータを統合した環境マップを生成するのに要する計算コストを低減した移動ロボットを提供する。
【解決手段】移動ロボットは、移動中に繰り返し周囲の障害物を検知する。オドメトリ部は、障害物検知を行った検知地点間の距離と夫々の検知地点における検知方向の間の角度を記録する。マップ生成部は、記録された距離と角度に基づいて、各検知地点における障害物センサのデータを統一の座標系に写像した環境マップを生成する。マップ生成部はさらに、最新の検知地点との距離が既定の距離閾値より大きいという距離条件、及び、前記最新の検知地点における検知方向との角度が既定の角度閾値よりも小さいという角度条件、を共に満足する過去の検知地点におけるセンサデータを、環境マップを生成するための元データから除外する。
(もっと読む)
制御装置および自動作業車
【課題】山林などのGPS技術に用いられる信号を受信しづらい環境、周囲の状況の変化が大きい環境においても、自動で車両を走行させるときの正確性を向上させること。
【解決手段】本発明の実施形態における運搬車は、車体を移動させるための操作を受け付ける操作手段から操作情報を取得する操作取得手段と、車体の傾きを測定する傾斜測定手段と、操作情報に応じて車体が移動するように移動手段を制御する手動制御手段と、手動制御手段の制御において用いられた操作情報、および制御が行われているときに測定された傾きを示す測定情報を取得して記録情報を生成する記録手段と、記録情報に記録された操作情報に応じて車体が移動するように、移動手段を制御する自動制御手段と、記録情報における傾きと測定される傾きとが予め決められた関係を満たすように制御の内容を補正する補正手段とを具備する。
(もっと読む)
ロボット掃除機、並びにロボット掃除機を用いた遠隔監視システム及びロボット掃除機を用いた遠隔監視方法
【課題】掃除又は走行時に作成した掃除地図を提供し、特定の位置又は領域の監視画像を提供するロボット掃除機を備えることにより、掃除地図上の特定の位置又は領域にロボット掃除機を移動させたり、該当領域の掃除を行わせたりするように制御することができ、該当領域の監視画像を提供することにより、遠隔監視効率及びシステムの運用効率を向上させ、ユーザの利便性を向上させることができるロボット掃除機、並びにそれを用いた遠隔監視システム及びその遠隔監視方法を提供する。
【解決手段】ロボット掃除機100は、掃除領域を撮影して監視画像を生成する少なくとも1つの監視カメラ110と、ロボット掃除機100を駆動し、掃除領域を探索して掃除地図を作成する制御ユニット130と、監視画像及び掃除地図を外部装置に送信し、外部装置から制御命令を受信する通信サーバ120と、を有する。
(もっと読む)
応対ロボット、応対制御方法、及び応対制御プログラム
【課題】ロボットが人に接近する動作を人の動きに応じて適切に制御できるようにする。
【解決手段】自律的に移動し、人に対する応対行動を行うロボットにおいて、人の位置及び動きを検知する人検知部23と、人検知部23により検知された情報に基づいて人の移動経路を予測すると共に人の移動方向の変化に応じて移動経路を修正する人経路予測部24と、人の移動経路に基づいて応対行動を実施するためにロボットが人に接近する移動経路を生成するロボット経路生成部25と、人の移動経路とロボットの移動経路との交点を想定する交点想定部26と、ロボットが移動可能な応対可能領域内に交点が存在するか否かを判定する判定部27と、交点が応対可能領域から外れた場合に応対行動のための移動を停止する停止部28とを備える。
(もっと読む)
移動体の位置検出方法
【課題】フォークリフトなどの移動体の位置及び向きを簡易に推定する方法を提供する。
【解決手段】複数の柱が平面視で格子状に配置された対象エリア内において、検出感度に指向性を有する複数のRFIDタグを、指向性の向きが該格子方向と一致するように複数の柱に配備する。また、フォークリフト5に、RFIDタグを検出するリーダ装置と、RFIDタグとリーダ装置の間で電波の送受信を行うアンテナとを配備する。さらに、検出されるRFIDタグの対象エリア内における配置とフォークリフト5の対象エリア内における推定位置との関係を示す位置推定パターンを備えておく。複数の柱に配備されたRFIDタグを、アンテナから送受信される電波を介して、リーダ装置で1つ以上検出し、検出されたRFIDタグの対象エリア内における配置に対応する位置推定パターンを判別することで、フォークリフト5の位置を推定する。
(もっと読む)
経路探索システム、経路探索方法、及び移動体
【課題】理想的な最短経路により近い経路を生成可能とする。
【解決手段】本発明に係る経路探索システム110は、進入禁止グリッドが設定されたグリッドマップを記憶する地図情報記憶部111と、移動始点及び障害物からの距離に応じたポテンシャル値に基づき、各グリッドの距離ポテンシャル値を生成する距離ポテンシャル生成部112と、前回のグリッド探索ベクトルから、次探索グリッドの決定と、局所ポテンシャル場計算用グリッドの選択をする探索グリッド決定部113と、局所ポテンシャル場を計算する局所ポテンシャル場計算部114と、前回のグリッド探索ベクトルが次探索グリッドに進入する際のエッジ上の点を探索枝の基点として、局所ポテンシャル場の最急勾配で降る方向に探索枝を延ばし、その方向をグリッド探索ベクトルとして決定するグリッド探索方向決定部115とを備える。
(もっと読む)
ロボット自己位置同定システム
【構成】ロボット自己位置同定システム100は、ネットワーク400を介して接続される追跡サーバ10およびロボット18を含む。追跡サーバ10は空間内の実体(E)を追跡し、ロボット18は状態データを出力する。追跡サーバ10は状態データおよび実体(E)の位置データをバッファに記憶する。また、追跡サーバ10はバッファに記憶された複数の位置データおよび複数の状態データに基づいて、ロボット18と実体(E)とを関連付ける。さらに、追跡サーバ10は、ロボット18に関連付けられた実体(E)を利用して、補正データをロボット18に送信する。そして、ロボット18は、追跡サーバ10が送信した補正データに基づいて自身の位置および角度を補正する。
【効果】ロボット18と追跡サーバ10で追跡される実体(E)とを関連付けることができるため、容易にロボット18を自己位置同定することができる。
(もっと読む)
移動体
【課題】外部に補正用の基準部材を設置することなく、物体の位置を測定するセンサの取り付け角度ずれに起因する誤差を補正することが可能な移動体を提供する。
【解決手段】車体11に搭載され、走行上計測を必要とする物体が存在する第1の領域及びその他の第2の領域を計測領域とし、物体の位置を計測するセンサ12と、車体11に設けられ、第2の領域の予め決められた位置に配置された基準部材13と、センサ12が計測した基準部材13の位置と予め決められた位置とに基づいて、センサ12の取り付け角度ずれに起因する誤差を補正する補正部22を有し、車体11の移動を制御する制御装置14とを備える。
(もっと読む)
移動体の制御システム
【課題】無線通信装置の受信能力の低下による通信障害の発生を予測できる移動体の制御システムを提供すること。
【解決手段】移動体が、その走行位置を検出する走行位置検出手段と、無線通信装置にて受信する運行情報及び走行位置検出手段にて検出される走行位置情報に基づいて走行作動を制御する走行制御装置とを備えて構成され、運行制御装置が、移動体が無線通信装置にて送信する走行位置情報Pp、及び、無線通信装置が通信中継装置から受信している無線信号の受信強度を示す受信強度情報Prに基づいて取得される移動体の走行位置に対応した受信強度と、当該走行位置についての基準受信強度Ls1・Ls2とを比較して、無線通信装置の受信能力が低下している受信能力低下状態であるか否かを判別する受信能力評価手段を備えて構成されている移動体の制御システム。
(もっと読む)
搬送台車システム
【目的】 長細い荷物や平面積が広い荷物などの特殊な荷物についても、狭い通路などの特殊な環境でも、低コストで対応することができる、搬送台車システムを提供する。
【構成】 それぞれが複数のオムニホイール付きの、複数の台車を備えており、各台車は自らの情報を取得すると共に、他の台車の情報を無線で定期的に取得することにより、マスターとの同期が必要ではない事項については、各台車(マスター及びスレーブ)が自らを自律的に制御し、発進又は停止などのマスターとスレーブとの同期が必要な事項については、マスターがその発進又は停止を指示するためのスレーブ指示信号をI/Oテレコントロール通信を使用して各スレーブに送信し、各スレーブはこれに基づいてマスターに同期して発進又は停止するようにした、搬送台車システムである。
(もっと読む)
位置推定装置、位置推定方法及びプログラム
【課題】現在の位置が既に登録済みの場所であるか、未登録の場所であるかを認識することができる位置推定装置、位置推定方法及びプログラムを提供する。
【解決手段】位置推定装置1は、入力画像から局所特徴量を抽出する特徴量抽出部11と、各登録場所と局所特徴量が対応づけられて保存されているデータベースを参照し、入力画像と登録場所とのマッチングを求めるマッチング部13と、マッチングが所定の閾値以上である場合に、選ばれた登録場所の近傍の登録場所を含めて類似度を算出する類似度算出部15と、類似度が所定の閾値以上である場合に、当該入力画像が登録場所であると認定する登録場所認定部17とを有する。
(もっと読む)
141 - 160 / 867
[ Back to top ]