
Fターム[5H301AA10]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体の可動空間、領域、経路 (2,962) | 所定の空間、領域を自由に移動可能なもの (867)
Fターム[5H301AA10]に分類される特許
161 - 180 / 867
自己位置推定装置および自己位置推定方法
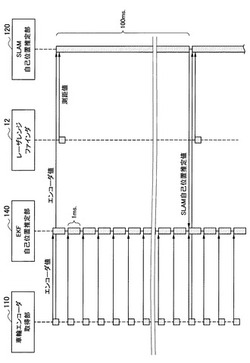
【課題】高サンプリング周期で、高精度に自己位置を推定することが可能な自己位置推定装置を提供する。
【解決手段】本発明の自己位置推定装置は、移動機構を備え、所定の空間を移動可能な自律移動装置の移動機構による動作情報を検出する内界センサ、および所定の空間内に関する空間情報を検出する外界センサによる検出結果に基づいて、第1のサンプリング周期で自己位置を推定する第1の自己位置推定部と、第1の自己位置推定部による自己位置推定結果と、内界センサにより検出された自律移動装置の動作情報とに基づいて、第1のサンプリング周期よりも高いサンプリング周期で自己位置を推定する第2の自己位置推定部と、を備える。
(もっと読む)
移動体位置検出システムおよび方法

【課題】ポールスターアルゴリズムを用いた際の照合不良を起こし難くして、検出の信頼性を確保した移動体位置検出システムおよび方法を提供する。
【解決手段】平面12上を移動する移動体16の位置を検出する移動体位置検出システム10であって、撮像手段20により取得した画像中のドットと、このドットに対応するポールスターデータベース34中のドットとの間の誤差を吸収するための尤度を設定したポールスター特徴量を用いてポールスター照合を行うポールスター照合手段24と、ポールスター照合手段24により照合された照合ドット候補から所定の照合ドットに絞り込む絞り込み手段26と、絞り込み手段26により絞り込んだ所定の照合ドットからなるドットパターンの位置関係に基づいて、移動体16の現在位置および方向を検出する検出手段28とを備えるようにする。
(もっと読む)
自律移動体、自己位置推定方法、地図情報作成システム
【課題】自己位置推定の精度を向上することができる自律移動体、自己位置推定方法、地図情報作成システム、及び地図情報作成方法を提供する。
【解決手段】本発明の自律移動体は、周囲の障害物までの距離に応じた距離データを測定するレーザセンサと、記移動環境の異なる測定面での2次元の推定用地図情報を複数記憶する地図情報記憶部22と、自己位置又はレーザセンサの測定角度に基づいて、地図情報記憶部22に記憶された複数の推定用地図情報の中から1つの推定用地図情報を選択する地図情報選択部26と、地図情報選択部26で選択された推定用地図情報とレーザセンサで測定された距離データとに基づいて、自己位置を推定する自己位置推定部23と、を備えた。
(もっと読む)
倒立二輪車、その姿勢制御方法及びプログラム
【課題】特別なロック機能等を設けることなく、胴囲の大小にかかわらず、搭乗が可能な倒立二輪車、その姿勢制御方法及びプログラムを提供する。
【解決手段】倒立二輪車は、ユーザが搭乗するステップを有する本体と、本体と同軸上に取り付けられた1対の駆動ユニットと、駆動ユニットにより回転駆動される左右の車輪と、本体に取り付けられ前記ユーザがつかまるためのハンドルと、倒立二輪車の姿勢情報を含む動作状態を検出する動作状態検出手段102と、検出した姿勢情報と入力する姿勢情報指令とに基づいて、駆動ユニットの駆動速度指令を生成する姿勢制御手段103と、ユーザがステップに搭乗した際に、ユーザとハンドルとの間の距離が最適になるように設定した場合の本体ピッチ角度の水平方向からのずれ度を調整角度として検出した姿勢角度を調整する調整手段105とを有する。姿勢制御手段103は、調整角度を姿勢情報指令として姿勢制御を実行する。
(もっと読む)
ロボットのプログラム及び情報処理装置のプログラム
【課題】環境地図の再作成に要するコストを低減し、かつ環境地図をタイムリーに再作成することのできる技術を提供する。
【解決手段】所定領域内の固定物の配置位置を含む地図情報を記憶し、地図再作成の際、所定領域内をロボット10を移動させつつ(1)乃至(5)を繰返し実行する。(1)エンコーダ21を積算してロボットの自己位置を算出する(2)ロボットの所定視野角範囲内にある固定物及び移動可能物までの距離を測定する(3)測定した距離と、地図情報から得られる固定物までの距離とから補正自己位置を求める(4)測定値の内、移動可能物までの距離を表す測定値を抽出する(5)抽出した測定値と補正自己位置とから移動可能物の配置位置を算出する。そして、算出した移動可能物の配置位置を集約処理して新たな配置位置を求め、求めた新たな配置位置を外部に出力する。
(もっと読む)
経路設定装置、経路設定方法、及びプログラム
【課題】人の現在位置を中心として移動体の経路から外すべき範囲を設定するとき、その範囲を適切に設定することができるようにする。
【解決手段】目的地情報取得部100は、目的地の位置を示す目的地情報を取得する。人情報取得部120は、移動体の周囲に位置する人の位置情報を取得するとともに、人の属性を取得する。予想範囲算出部140は、人情報取得部120が取得した位置情報及び属性に基づいて、人の予想移動範囲を算出する。移動経路算出部180は、予想移動範囲及び目的地情報を用いて移動体の移動経路を算出する。
(もっと読む)
移動装置、移動方法およびプログラム
【課題】周辺に存在する対象物の状態に応じた合図でロボットの行動を認識させる。
【解決手段】移動装置100は、移動方向を示す方向指示部106と、周辺に存在する対象物の状態を認識する認識部102と、認識部102により認識された対象物の状態に応じて、方向指示部106により示される方向を制御する制御部104と、を備え、認識部は102、対象物と移動装置100との距離または対象物の移動速度を認識し、認識部102により認識された対象物と移動装置100との距離が短いほど、制御部104は、移動装置100のより詳細な移動経路を示すように方向指示部106を制御する。
(もっと読む)
倒立型移動体及びその制御方法
【課題】危険な状態を判別可能として安全に制御する倒立型移動体を提供する。
【解決手段】倒立型移動体103の負荷角度と車輪のトルク指令とに基づいて、負荷角度推定誤差を算出し107、負荷角度推定誤差が発散するか否か、及び、倒立型移動体の状態を判別する。倒立型移動体は、状態判別器108から入力した倒立型移動体の状態に応じて、安全な状態においては倒立制御を開始/継続/再開し、危険な状態においては退避走行または停止などの安全確保制御を実施する。
(もっと読む)
宇宙飛翔体用ターゲット
【課題】地球の夜間領域の日陰時でも、照明を行うことなく、ドッキング作業が可能となる宇宙飛翔体用ターゲットを提供する。
【解決手段】ターゲット板11と、所定数の発光素子(発光ダイオード12)とを有し、各発光素子は、ターゲット板11の略中心を交点として互いに直交する第1の直線及び第2の直線上に等間隔で配置されている。
(もっと読む)
障害物検知装置、自律移動体、障害物検知方法
【課題】細い棒や細い柱、人間の脚といった細物を確実に検知可能な技術を提供する。
【解決手段】障害物検知装置は、画像データを記憶するメモリA10と、前記画像データに基づいて画像を投影するプロジェクタ4と、映し出された画像を撮影して画像データを生成するカメラ5と、生成された前記画像データを記憶するメモリB12と、メモリA10に記憶されている前記画像データと、メモリB12に記憶されている前記画像データと、を比較する比較部13と、を備える。自律移動型ロボット100は、ロボット本体3と、ロボット本体3を移動させるための駆動回路16と、駆動回路16を制御する制御部9と、上記の障害物検知装置と、を備える。
(もっと読む)
自走車
【課題】指等の入力指示体の最低限の動きで操作情報を入力することができる自走車を提供すること。
【解決手段】電動車椅子1において、車椅子本体10に対する操作入力に赤外光を利用した光学式の操作入力装置100を用いているため、指Ob1の小さな動きで操作入力を行なうことができる。このため、操作レバーを手動操作できない者や、音声入力できない者であっても、車椅子本体10を操作することができる。また、電動車椅子1には、赤外光を利用した光学式の障害物検出装置200を設けたため、安全な走行を実現することができる。
(もっと読む)
走行体の追従制御システム及びその制御方法
【課題】平面上を自由に走行する先導無人車に後続無人車を追従させる追従制御システムを提供する。
【解決手段】追従システム1は、第一走行体20に配置され、第一走行体および第二走行体10の位置と車体方向を特定する走行体位置検出部2と、前記車体方向から複数の進行角度を発生させる進行角度発生部3と、進行角度ごとに将来制御パラメータを計算し、第二走行体の将来位置と第一走行体との距離を計算する第一差異計算部4と、将来制御パラメータと現在制御パラメータの差異を計算する第二差異計算部5と、複数の進行角度の中から最適進行角を選定する最適進行角選定部6と、最適進行角選定部6で選定された制御パラメータを駆動機構11に出力する走行指令部7で構成される。
(もっと読む)
地図作成方法とロボットの移動経路決定方法
【課題】地図情報の作成及び教示を極めて簡単かつ直観的な操作により実現する。
【解決手段】ユーザは複数のランドマーク装置を任意の位置に配置する。設置が完了すると、各ランドマーク装置が周囲のランドマーク装置の番号とその方位を調査して隣接装置情報を生成し、さらにランドマーク装置同士が隣接装置情報を交換することによって自動的に地図情報が生成される。その後、ロボットに対しゴール地点のランドマーク装置の番号を指示すると、ロボットは最寄りのランドマーク装置からゴール地点までの経路を計算し、ランドマーク装置を順に辿ることでゴール地点に到達する。
(もっと読む)
無人搬送車
【課題】光軸調整を容易に行うこと。
【解決手段】複数の反射部17a〜17eを左右方向に段状に配置してなる検査用の反射板17に対して発光させる。そして、反射光を受光することにより、何れの反射部17a〜17eからの反射光であるかを特定する。そして、その結果を、発光部の光軸を調整するための指標となる光軸調整情報として表示部16aに表示させる。表示部16aには、反射した反射部17a〜17eに対応するシンボルHa〜Heが点灯した状態で表示されるので、その表示内容から光軸調整の有無及び調整量を認識できる。
(もっと読む)
経路計画装置、自律移動ロボット、及び移動経路の計画方法
【課題】安全性と移動性を効果的に両立しながら、未知の障害物が存在する環境内での移動ロボットの移動経路を決定することを可能にする。
【解決手段】ロボット1は、環境地図120に規定されている既知の障害物の位置及びその周囲を含む第1の領域と、環境地図120に規定されていない未知の障害物の位置及びその周囲を含み前記第1の領域に比べて広範囲に設定される第2の領域とを移動制限領域として、移動制限領域内の移動ロボットの通過が抑制されるように環境地図120に基づいて移動経路を決定する。
(もっと読む)
車両の走行制御システム
【課題】走行車両を軌道に沿って走行させる走行制御システムを提供する。
【解決手段】走行車両200は、走行方向と直交する方向の両側において同軸上に配置された左右一対の車輪210、210を有し、これら車輪210、210にトルク指令を与えることで走行する。摩擦路面には、軌道Lから離れるに従って摩擦が小さくなるように摩擦係数の分布が設定されている。走行車両200は、左右の車輪210、210に対し同じトルク指令値を与えながら走行する。
(もっと読む)
撮影経路計算装置
【課題】未知空間内のランドマークや景観の特徴によらず、ロボットの移動に伴うカメラの撮影経路を正確に算出できる撮影経路計算装置を提供する。
【解決手段】撮影点の全周囲の全方位画像を、画像座標系の横軸が方位であり、画像座標系の縦軸が撮影装置4による撮影方向に対するピッチ角である画像に変換して、当該変換後の画像の一定の方位毎にピッチ角で規定される上下方向の画素値の周波数成分を算出し、ロボット1の移動に伴って撮影装置4に撮影された各全方位画像について周波数成分を基に方位を照合することにより、全方位画像間の相対方位を推定して、推定された全方位画像間の相対方位に基づいて、ロボット1の移動に伴う撮影装置4の撮影経路を算出する。
(もっと読む)
経路生成装置と方法および経路生成装置を備える移動装置
【課題】移動経路の探索において、より高速で移動可能な移動経路を見つけ出すことで、移動装置の高速移動を可能にすることにある。
【解決手段】自律移動する移動装置の移動経路を生成する経路生成装置10であって、移動開始位置から目標到達位置までの間に設定され移動経路の生成の指標となる複数の経由位置を記憶した記憶装置3と、移動装置の現在位置を検出する位置検出装置5と、移動装置の移動中において、現在位置に基づいて、複数の経由位置のうち移動装置が次に通過する経由位置に向かうための移動経路を生成する経路探索装置9とを備える。経路探索装置9は、複数の移動経路候補を生成するとともに、これら移動経路候補の各々について高速走行可能度を算出し、これら高速走行可能度を互いに比較することで、複数の移動経路候補の中から、最も高速走行可能度が高い移動経路候補を選択し、選択した移動経路候補を実際に使用する移動経路として設定する。
(もっと読む)
無人移動体の制御方法
【課題】高速度で移動する無人移動体に対しても、きめ細かい移動方向の指示を迅速且つ簡単に行い得る無人移動体の制御方法を提供する。
【解決手段】移動領域内の画像データを取得する遠隔操縦用カメラ14を搭載した半自律走行車Bの移動を携帯型遠隔操縦装置Aによって制御する方法であって、携帯型遠隔操縦装置Aは遠隔操縦用カメラ14で得た画像を映し出すディスプレー40を有し、携帯型遠隔操縦装置Aのディスプレー40の画像上におけるカーソルスティック51による3点のポイント&クリック操作入力により、半自律走行車Bを旋回させる位置を指示すると共に、旋回位置での旋回方向及び移動距離をベクトルで指示し、半自律走行車B側において、ディスプレー40の画像上で指示した画像座標系の旋回位置及び旋回ベクトルを世界座標系に変換させ、変換後の世界座標系の旋回位置及び旋回ベクトルの指示に従って半自律走行車Bを移動させる。
(もっと読む)
水中航走体の航走制御方法及び装置
【課題】 複数の水中航走体に装備する音響スキャンソナーの数を低減させる。
【解決手段】 音響スキャンソナー6を備え、位置表示装置2を搭載して航走できるようにした位置特定用水中航走体1と、位置表示装置2に対する相対位置を検出するための相対位置検出装置8を有する被誘導用水中航走体3を形成する。先ず、位置特定用水中航走体1を航走させて音響スキャンソナー6により海底4の特定位置4aを正確に検出させて、そこに位置表示装置2を設置させる。その後、被誘導用水中航走体3を航走させるときに、相対位置検出装置8により位置表示装置2との相対位置を検出させ、検出された位置表示装置2に向けて航走させることで、被誘導用水中航走体3を海底4の特定位置4aまで正確に到達させる。
(もっと読む)
161 - 180 / 867
[ Back to top ]