
Fターム[5H301CC01]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 制御変量、指令内容 (1,997) | 移動体自体の位置、進路 (1,814)
Fターム[5H301CC01]の下位に属するFターム
Fターム[5H301CC01]に分類される特許
1 - 3 / 3
倒立振子型車両の制御装置
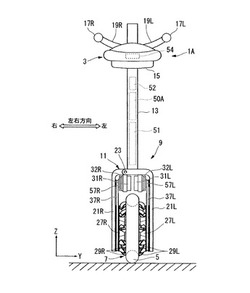
【課題】移動動作部(車輪体)とクラッチとを連動することで操作性を向上させ、また、クラッチの動作状況(操作状態)に応じて適切な姿勢制御を行うことができる、倒立振子型車両の制御装置を提供する。
【解決手段】倒立振子型車両1Aは、右側の電動モータ31Rに繋がるクラッチ32Rと、左側の電動モータ31Lに繋がるクラッチ32Lとを備えている。そして、例えば、電動モータ31Lに特定の状態が発生した場合は、電動モータ31Lのクラッチ32Lが開放される。この場合、倒立振子型車両1Aは、電動モータ31Rにより、特定の一方向(乗員から見て斜め方向)にのみ移動ができるようになる。そして、倒立振子型車両1Aがこの一方向へ移動する場合に、制御ユニット50Aは、一方向姿勢演算部を選択し、この特定の一方向に対する姿勢制御演算により適切な姿勢制御を行う。
(もっと読む)
遠隔操作装置

【構成】遠隔操作装置10は、LRF12a,12bを含み、LRF12a,12bと同じ場所に設けられるロボット14を遠隔操作する。遠隔操作装置10はLRF12a,12bを利用して検出領域(E)内に居る人間の局所行動を検出し、その局所行動を記録する。検出領域(E)内は空間グリッド化され、その空間グリッド毎に局所行動のヒストグラムが算出される。遠隔操作装置10は、ヒストグラムから算出される類似度に基づいて空間グリッドをクラスタリングして、クラスタリング地図をLCD(22)に表示する。表示されたクラスタリング地図に含まれる任意のエリアが選択されると、ロボット14には、選択されたエリアの属性に基づいて決まる動作命令と、座標情報とが付与される。
【効果】使用者は、複数の人間の行動が視覚的に示されるクラスタリング地図を参照して、ロボット14を遠隔操作することができる。
(もっと読む)
自己位置認識方法及び自己位置認識装置
【課題】ランドマーク、磁気マーカ等の設置を行なわなくても、自己位置を認識できる方法及び装置を提供する。
【解決手段】移動体が自己の位置を認識する方法であって、移動体が移動する環境において基準磁気を測定し、基準磁気と基準磁気が測定された位置とが対応付けられた磁気−位置情報を予め記憶するステップ(a)と、前記環境において移動体が備える磁気センサにより直流の実測磁気を測定するステップ(b)と、ステップ(a)で記憶された基準磁気と、ステップ(b)により測定された実測磁気と、を対比して実測磁気が測定された位置を特定するステップ(c)と、を備える。
(もっと読む)
1 - 3 / 3
[ Back to top ]