
Fターム[5H301DD00]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体への指令の設定方法、設定手段 (1,386)
Fターム[5H301DD00]の下位に属するFターム
移動開始時に与え移動体内に保持するもの (492)
移動中に外部から与えられるもの (484)
誘導用ガイドを利用して与えられるもの (21)
専用の有線により与えられるもの (30)
無線により与えられるもの (358)
Fターム[5H301DD00]に分類される特許
1 - 1 / 1
作業ロボット
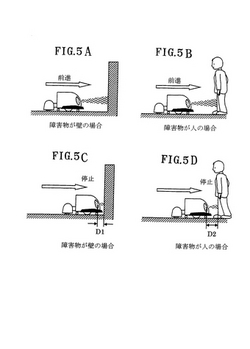
【課題】人との接触防止を確実にするとともに、壁際ギリギリまでの作業を可能にし、作業性能の向上を実現する作業ロボットを提供する。
【解決手段】障害物までの距離を測定する距離測定手段と、障害物が移動物体か静止物体かを判別する判別手段と、走行を停止すべき障害物までの距離の閾値Dxを算出する閾値算出手段と、前記距離測定手段により測定された距離計測値Mi が前記閾値Dxに達した時に走行を停止させる走行制御手段と、を備え、前記閾値算出手段は前記判別手段による判別の結果に基づいて、障害物が移動物体であると判別された場合に前記閾値Dxを減少させ、一方、障害物が静止物体であると判別された場合に前記閾値Dxを増大させて、前記閾値Dxを算出することを特徴とする。
(もっと読む)
1 - 1 / 1
[ Back to top ]