
Fターム[5H301DD05]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体への指令の設定方法、設定手段 (1,386) | 移動中に外部から与えられるもの (484)
Fターム[5H301DD05]の下位に属するFターム
手動操縦によるもの(リモコン) (159)
固定設置された装置から与えられるもの (195)
他の移動体から与えられるもの (27)
Fターム[5H301DD05]に分類される特許
1 - 20 / 103
移動体の位置・姿勢推定システム
【課題】走行開始時の自律移動ロボットの位置・姿勢の推定にかかる時間を短縮し、高速応答の走行制御を可能とする。
【解決手段】距離センサ3の測定結果から得られた距離和データに対して、これに近似した距離和地図データ群内の距離和データを検索し、その結果に基づいて自律移動ロボットの位置・姿勢を推定するマッチング処理を行う。このとき、マッチング処理の探索条件を複数用意しておく。第1の探索条件は、走行履歴に含まれる距離和地図データの中で自律移動ロボット1が取り得る位置・姿勢の距離和地図データとする。第2の探索条件は、予め設定した経路上での自律移動ロボット1が取り得る位置・姿勢の距離和地図データとする。第3の探索条件は、通路内での位置・姿勢の距離和地図データとする。最終の探索条件は、地図データ内で自律移動ロボット1が取り得る位置・姿勢の距離和地図データとする。
(もっと読む)
搬送車システム

【課題】各搬送車に対する搬送要求の割り当てを効率よく行うことのできる搬送車システムを提供すること。
【解決手段】複数のステーション120に沿って設けられた一方通行の経路105と、複数の台車140と、コントローラ110とを備える搬送車システムであって、コントローラ110は、数の搬送要求を複数の台車140に通知する要求通知部112を有し、複数の台車140のそれぞれは、複数の搬送要求を受信する要求取得部142と、先行搬送車から、複数の搬送要求のうちの、先行搬送車が実行を予定する搬送要求を示す先行車情報を受信する受信部144と、先行車情報を参照することで特定される、複数の搬送要求のうちの当該搬送車が実行可能な1以上の搬送要求の中から、当該搬送車が実行する搬送要求である実行要求を決定する決定部146と、実行要求を示す情報を、後続搬送車に送信する送信部148とを有する。
(もっと読む)
移動動作決定装置、その方法及びプログラム
【課題】簡素化された構成で確実に障害物を回避し、移動体の最適な経路を決定すると共に、様々な目的に応じた適応的な行動選択を行うことができる移動動作決定装置等を提供する。
【解決手段】検出対象物の大きさに応じてポテンシャルを設定するポテンシャル設定部21と、検出領域を区画する区画検出領域のうちポテンシャルを含んでいる区画検出領域を特定する区画検出領域特定部22と、区画検出領域ごとに、含まれるポテンシャル値を検出値として算出する検出値算出部23と、区画検出領域の組み合わせ検出パターン、及びそれに対応する出力動作を動作設定情報として記憶する動作設定情報記憶部27と、動作設定情報の組み合わせ検出パターンとを比較して、移動体10の出力動作を特定する出力動作特定部24と、特定した出力動作に対して、検出値に基づいて出力動作を最適化して決定する動作決定部25とを備える。
(もっと読む)
無人移動体及び無人移動体の制御方法
【課題】道路のある環境下で且つ道路や交差点に関する事前情報が一切ない状況下で、曲がり道や交差点を道なりに走行させることができ、交差点での右左折も曲折の指示のみで円滑に行わせ得る無人移動体及び無人移動体の制御方法を提供する。
【解決手段】特に指示がない場合には、それまで走行してきた走行路に継続し易い道なり走行路Rを測距データに基づいて局所地図上で抽出して、この道なり走行路Rに沿って半自律走行車Aを自律走行させ、交差点Cで他の走行路Rlへ向かわせる場合には、交差点進入時に受ける新規操舵指令に従った他の走行路Rlへの変更路Rcを設定して、この変更路Rcを介して半自律走行車Aを他の走行路Rlへ進行させる。
(もっと読む)
有軌道台車システム
【課題】有軌道台車システムにおいて、軌道に配置されたマークを確実に検出する。
【解決手段】有軌道台車システムは、天井又は天井近傍に敷設された軌道100と、軌道に沿って走行する台車とを備える。台車は、軌道の走行面部上を走行する走行部210と、走行部から軌道の間隙を利用して懸垂される台車本体部220と、走行部及び台車本体部のうち一方に設けられる検出手段610と、走行部及び台車本体部のうち他方に設けられ、検出手段から照射された光を検出手段へと反射させる反射手段620とを有している。軌道は、所定位置における走行面部から、検出手段及び反射手段間の光路を遮るように間隙側に突出するマーク部630を有している。
(もっと読む)
自動芝刈り機
【課題】走行路面に柔軟に対応して傾斜地形のカッティングも可能な自動芝刈り機を提供する。
【解決手段】本発明は、少なくとも位置検出手段を含む各種センサとモータ制御の駆動輪とを有し、学習機能を担う制御ユニットを備えた自律走行型の自動芝刈り機であって、制御ユニットは、センサの情報を基に駆動輪を制御して目標地点に移動させるためのドラム制御部と、走行路面の傾斜に応じて車軸を動かし車体の平衡を保つ車体平衡部と、走行路面に沿ってカッティングユニットを追従させて芝刈りを行うカッティング部と、センサの情報を基に各ユニットを制御するための各種演算及び該演算に対応する処理を行う演算処理部と、を有する。
(もっと読む)
自律移動ロボットのエレベータ乗降方法
【課題】周囲の環境などに影響されずに、エレベータ籠内の状態を感知し、人との共用を排他的に制限し、人のエレベータ利用時の安全性向上を図ることを目的とする。
【解決手段】上記目的を達成するために、本発明は、エレベータ籠に乗降して複数の階にわたる領域を自律的に移動する自律移動ロボットとエレベータ装置によるエレベータ乗降システムであり、前記自律移動ロボットは自身の周囲の環境を検出する環境センシング手段と、後述の乗降システム制御部と所定の信号の送受信を行なう無線通信手段を備え、前記エレベータ装置はエレベータ籠とエレベータへの搭乗するためにエレベータ籠を呼び出すエレベータ籠呼出部とエレベータ搭乗の出入口となるエレベータ扉とエレベータ籠の重量を検出するエレベータ籠重量検出部と、エレベータ籠を上下移動させるためのエレベータ籠巻上げ部とを備えることを特徴とする。
(もっと読む)
搬送車システム
【課題】搬送車システムにおいて、搬送車システムの搬送効率を向上させる。
【解決手段】搬送車システムは、複数の搬送車3と、複数の搬送車3と順番に通信を行う搬送車コントローラ47とを備えている。搬送車コントローラ47は、優先的に通信を行う優先通信搬送車3を記憶する優先通信搬送車記憶部59を有しており、複数の搬送車3の全てと順番に一度ずつ通信する間に、優先通信搬送車3と複数回通信する。
(もっと読む)
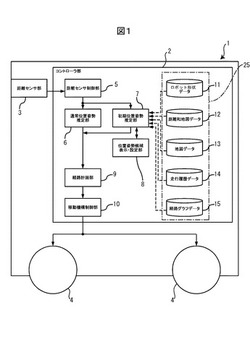
技術設備を遠隔操作式および/または自律式に検査するロボット用プラットフォーム
【課題】技術設備を遠隔操作式および/または自律式に検査するロボット用プラットフォームであって、少なくとも、駆動手段と、検査手段と、位置データを求めるための手段と、通信手段とを備えているものを改良して、公知の検査ユニットの欠点を解消して、様々な検査目的および検査場面に対する適合性を大幅に改善し、著しく簡素化されたトラブルのないデータ通信が得られるものを提供する。
【解決手段】ロボット用プラットフォーム10,20は、モジュール方式に形成されており、通信手段12,13,14は、統一規格に従って作動し、測定データおよび位置データは、ストリーミングにより、遅延時間がエラーのない評価にとって十分な程度に小さく、特に1msより小さくなるように迅速に評価ユニットに伝達される。
(もっと読む)
領域分割装置、領域分割プログラムおよび領域分割方法ならびにコミュニケーションロボット
【構成】 ロボット10はCPU60を含み、CPU60は、グリッドマップを用いて、オブジェクトに接触しない領域を抽出したり、オブジェクトのみならず床の模様に接触しない領域を抽出したりする。ロボット10は、抽出(分割)された領域のうち、人間のリクエストに応じた1の領域を選択して、選択した領域の大きさや選択した領域との位置関係に応じて、発話内容を決定するとともに、ジェスチャを決定する。そして、ロボット10は、指示語や特定のオブジェクトに対して設定された相対言語表現によって発話するとともに、指差しの動作を実行して、選択された領域を人間に指示する。
【効果】 人間と同様に領域を分割し、人間と同様にその1つを指示することができる。
(もっと読む)
毛状体で移動する教材用ロボット
【課題】
ロボット教材を使用した教育においては児童の興味をそそる事が重要であり、
タイヤを使った駆動方式では、動きが単調な動きとなり、利用者の興味を引きにくいと言った問題がある。
ロボット教材のプログラミングにおいて、パーソナルコンピューターなどのプログラミング装置が必要になり、ものづくり教室などの運営に必要な設備が多くなり運営の必要経費が高くなる。
【解決手段】
複数の毛状体推進装置を使用して移動することでユーモアがある動きができる教材用自走ロボットを作成した。
本発明は手書きが可能な二次元バーコードの書式と、教材用自走ロボット自体にバーコードリーダーを搭載することで、パーソナルコンピューターなどを使用しなくても、教材用自走ロボット本体だけでプログラミングを行う事を可能とした。
(もっと読む)
無人搬送車、および、その走行制御方法
【課題】レーザにより位置認識をおこなう無人搬送車において、停止位置で精度よく停止することのできるようにすることができる。
【解決手段】地図データと、走行速度が設定された経路データとを保持し、レーザにより周辺環境の状況を計測して、地図データと計測されたデータとをマッチングして、現在位置を求める無人搬送車において、経路データには、無人搬送車の走行を停止させる終点、予め設定しておく。そして、無人搬送車の現在位置と操舵角により定まる目標停止線が、終点上にのるか、終点を越えたときに、前記無人搬送車を停止させるように制御する。
(もっと読む)
ランドマーク識別のための自動標識付け
【課題】画像においてランドマークを識別する方法を提供する。
【解決手段】作業現場の画像を受け取り、この画像において示唆された作業現場の特徴の識別を判定するために画像を分析する。作業現場の特徴の示唆された識別を、通信ユニットを通じて送る。確認された識別を形成するために、作業現場の特徴の示唆された識別を受け取る。確認された識別、およびこの確認された識別と関連のある複数の属性を、データベースに格納する。
(もっと読む)
搬送装置の制御装置
【課題】搬送装置を構成する複数の搬送台車の走行を協調させて制御する。
【解決手段】一対の車輪をそれぞれ駆動する一対のモータを有してなる搬送台車を、前後左右に複数並べて配置して重量物を搬送する搬送装置の制御装置を、各搬送台車を制御する複数の子コントローラと、各子コントローラを統括制御する親コントローラにより構成し、親コントローラは搬送装置の原点座標と各搬送台車の台車座標を記憶しておき、旋回走行等の制御モード指令に応答して、各搬送台車の操舵角を演算して操舵角指令値及び各搬送台車の台車座標における速度指令値を演算して子コントローラに出力し、子コントローラは操舵角指令値に基づいて自己の一対の車輪を互いに正逆方向に回転させて操舵角を制御し、速度指令値に基づいてそれぞれ自己の一対の車輪の回転速度をそれぞれ制御することを特徴とする。
(もっと読む)
外殻ロボット駆動システム
外殻ロボットは、ロボット本体と、外殻の周囲でロボットを移動させるための少なくとも一つの駆動モジュールと、搭載型動力源と、この搭載型動力源から動力の供給を受ける駆動モジュール用の動力サブシステムとを含む。複数の永久磁石要素が、駆動モジュールと関連付けられており、かつ、それぞれ、外殻に隣接したときの非短絡状態と、外殻に隣接していないときの短絡状態との間で切り換え可能となっている。 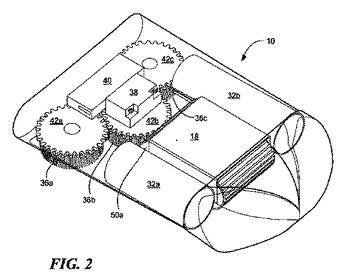 (もっと読む)
(もっと読む)
移動体装置
【課題】操作者の操作意図を適切に推定し、ロボットを移動する。
【解決手段】ZMP検出手段22が、接地面(走行面)に沿って移動するロボットのZMPの位置を検出し、操作意図推定手段44が、ZMP検出手段22により検出される、操作者からロボットに対して加えられた力により移動したZMPの位置に基づいて、操作意図を推定し、移動手段42が、操作意図推定手段44により推定された操作意図に基づいてロボットを移動させる。
(もっと読む)
複数移動体の行動範囲制限システム
【課題】複数の移動体のうち、あらかじめ設定された行動範囲を逸脱した移動体に対して、設定行動範囲内に帰還するように該子機を制限するシステムを提供する。
【解決手段】本発明による行動範囲制限システムは、乗員によって運転可能な、1つ以上の子機と、前記子機の位置を制御する特定機と、前記子機及び特定機の位置情報を供給する位置測定装置とからなる。特定機202Mは、位置測定装置206から特定機及び子機の現在位置情報を取得し、子機202Sの位置が特定機によってあらかじめ設定された制限領域302を逸脱しているか否かを判断し、逸脱している場合、特定機202Mは、子機202Sに対して、前記制限領域302内の目標帰還位置に移動するように指示情報を送信する。子機202Sは、前記指示情報を受信すると、位置情報に基づいて前記目標帰還位置に移動するように移動動作部5を制御する。
(もっと読む)
自律移動装置
【課題】自律移動装置において、一定数以上の移動物体が存在する領域の通過を安定かつ高速に可能とする。
【解決手段】自律移動装置1は外界センサ部2、移動物体検出手段40、自己位置推定手段41、追従対象選択手段42、経路生成手段43、駆動部3を備える。追従対象選択手段42は、移動物体の物体位置座標108、速度ベクトル109に基づいて本装置1の目標方向と一番近い移動物体を追従対象として選択し、経路生成手段43が追従対象の背後までの走行経路を生成する。追従対象選択手段42は対象物体を追従中にも他の移動物体の物体位置座標108、速度ベクトル109を取得して追従対象を変更したほうが良いと判断した場合、追従対象を変更し、経路生成手段43が変更後の対象物体までの走行経路を生成する。
(もっと読む)
ロボット制御システム及びロボット制御プログラム
【課題】物体の搬送作業を行えるロボットを好適に制御できるロボット制御システムを、提供する。
【解決手段】カメラ画像が表示されているタッチスクリーン上の或る範囲を指定する操作が行われた場合、カメラ画像に対する画像セグメンテーション処理結果を利用して、カメラ画像中の、ユーザが指定した範囲内に所定割合以上の部分が含まれているセグメント群からなる画像を探索し、探索した画像を、搬送対象物の画像として特定(S102)し、特定した画像に基づき搬送対象物をロボットに搬送させる制御処理(S110)を行う。
(もっと読む)
車両走行支援装置
【課題】車両特性の変化を直接的に解析することなく、車両移動量の推定精度の向上を図る。
【解決手段】経路演算部12は、車輪速センサ21によって検出された車輪速に基づいて車両の走行軌跡の曲率ρvを算出するとともに、舵角センサ28によって検出された前輪の転舵角δとに基づいて曲率ρstを算出する。また、経路演算部12は、算出した各曲率ρv,ρstの信頼度をそれぞれ評価し、この評価結果に基づいて微小時間の曲率を決定する。そして、経路演算部12は、決定された所定区間の移動量に基づいて自車両の自己位置を推定する。
(もっと読む)
1 - 20 / 103
[ Back to top ]