
Fターム[5H301DD07]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体への指令の設定方法、設定手段 (1,386) | 移動中に外部から与えられるもの (484) | 固定設置された装置から与えられるもの (195)
Fターム[5H301DD07]に分類される特許
1 - 20 / 195
自動搬送システム
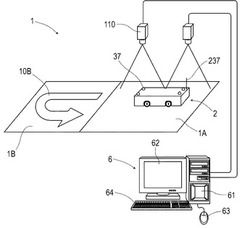
【課題】コストを抑制しつつ、走行経路の変更要求に柔軟に対応できる自動搬送システムを提供すること。
【解決手段】操舵可能な駆動輪を含む駆動ユニット、及び駆動ユニットを制御する制御ユニットを備えた自動搬送車2と、自動搬送車2の位置を検知する位置検知手段と、を備え、予定された経路に沿って自動搬送車2を移動させる自動搬送システム1では、自動搬送車2が移動するエリアとして、位置検知手段による検知位置を利用して自動搬送車2が制御される誘導走行エリア1A、及び自動搬送車2の位置が検知されないエリアであって検知位置を利用することなく自動搬送車2が制御される自律走行エリア1Bが設定されている。
(もっと読む)
搬送車システムのシミュレーションシステムとシミュレーション方法

【課題】
共通のシミュレーション結果に対し、複数の端末で各々の観点から解析を行う。
【構成】
処理装置間でワークを搬送する搬送車システムをシミュレーションする。搬送車システムでの複数の仮想的な搬送車の走行をシミュレーションし、シミュレーションにより得られたデータと搬送車システムの背景画像とを複数の端末へ送信する。各端末は、データを画像として表示する搬送車システム内のエリアと時間の範囲とを端末毎にユーザが指定し、指定された範囲内のデータを画像化すると共に搬送車システムの背景画像と合成し、合成された画像をモニタに表示する。
(もっと読む)
無人搬送車
【課題】SLAM技術を用いた無人搬送車であっても、古典的な誘導方法で走行する無人搬送車と同様に簡単な方法で走行制御の破綻を監視することができる無人搬送車を提供すること。
【解決手段】SLAM技術を用いて現在位置を求め、求められた現在位置を基に、予め設定されている経路データ123に沿って走行し、経路データ123と無人搬送車1の現在位置とのずれを補正するための旋回角θ及び無人搬送車1の進路方向が目標位置に向くための操舵角ρを無人搬送車1が経路データ123に沿って走行するように補正しながら制御する制御手段10と、制御手段10による補正量の変動を監視するとともに、補正量が外乱によって制御可能な範囲を逸脱したときに走行を停止する監視手段11とを備える。
(もっと読む)
処理設備
【課題】処理装置の制御負荷の増加を回避しながらも、処理作業効率の向上を図ることができる処理設備を提供する。
【解決手段】複数の処理装置1及び処理対象物を貯留する貯留装置Qを経由する搬送ラインに沿って走行して処理対象物を搬送する搬送車3を管理する搬送管理手段HCが、処理装置1から主管理手段JCに対して通信される処理進行情報を監視して、複数の処理装置1のうちで、処理対象物の処理が終了した又は終了間近である処理装置1を、主管理手段JCから搬送指令情報が通信されてくる以前に、事前搬送元として抽出し、その処理装置1から処理対象物を搬出するために、事前搬送元として抽出した処理装置1に対して搬送車3を走行させる事前搬送制御を実行するように構成されている。
(もっと読む)
無人搬送車および走行制御方法
【課題】運用が容易な無人搬送車および走行制御方法を提供する。
【解決手段】自身が走行する経路の情報である経路データ133に沿って走行する無人搬送車であって、自身の目的地に関する情報を取得し、現在位置を始点とし、目的地を終点として有する基本経路データ134がメモリデータ130に存在するか否かを判定し、存在しない場合、現在位置を始点として有する基本経路データ134をデータメモリ130から取得する取得処理と、取得した基本経路データ34の終点を新たな始点とする別の基本経路データ134をデータメモリ130から新たに取得して、終点を目的地に向けて、順に伸ばしていくつなぎ処理を、新たに取得した別の基本経路データ134の終点が、目的地に一致するまで実行し、取得した各基本経路データ134を経路データ133とするつなぎ処理部120を有することを特徴とする。
(もっと読む)
有軌道台車システム
【課題】有軌道台車システムにおいて、台車の不要な速度低下や走行停止を抑制する。
【解決手段】有軌道台車システムは、分岐点及び合流点を含む所定領域内に誘導線(600)を有する軌道(100)と、軌道を走行する複数の台車(200)と、誘導線管理装置(700)とを備える。複数の台車の各々は、送信部及び受信部(910,920)と、走行制御部(205)とを備える。誘導線管理装置(700)は、誘導線受信部及び誘導線誘導線送信部(710,720)と、特定台車(250)の第1の無線信号受信部(930)に対して無線信号を送信可能な第1の無線信号送信部(740)とを備えており、一の誘導線領域に一の特定台車を優先させて進入させる場合に、一の誘導線にブロッキング信号を送信すると共に、一の特定台車に対して一の誘導線領域内への進入を許可する許可信号を送信する。
(もっと読む)
搬送車システム、速度決定方法
【課題】環状の軌道上を一方通行で走行する搬送車を備える搬送車システムにおいて実荷状態で走行する搬送車の状況を把握し、搬送車システムの搬送効率を向上させる。
【解決手段】環状の軌道101と、搬送車102と、ステーション103とを備え、さらに、荷物を搬送する計画を示す情報である搬送計画を取得する搬送計画取得部104と、ステーション103、および、セグメントのレイアウト情報であるマップを取得するマップ取得部105と、搬送計画とマップとからセグメント毎に荷物を積載した状態で搬送車が通過する回数である実荷通過度数を算出する度数算出部106と、周回方向において実荷通過度数が連続的に増加するセグメントの区間である増加区間を特定する増加区間特定部107と、増加区間の実荷通過度数の低いセグメントにおける搬送車102の速度を低下させる制御部108とを備える。
(もっと読む)
有軌道台車システム
【課題】有軌道台車システムにおいて、接続軌道を効果的に短縮し、省スペースを実現する。
【解決手段】有軌道台車システムは、第1及び第2の本軌道(101,102)、並びに接続軌道(105)を有する軌道(100)と、台車(200)とを備える。台車は、一対の第1及び第2の分岐ローラ(610)をシフト可能に支持する分岐ローラ支持部(720)と、姿勢安定ローラ(620)をシフト不能に支持する姿勢安定ローラ支持部(710)とを有している。軌道は、第1の分岐ローラを案内する第1の分岐ガイド(110a)と、第2の分岐ローラを案内する第2の分岐ガイド(110b)と、無ガイド区間で姿勢安定ローラを案内する姿勢安定ローラガイド(120b)とを有している。
(もっと読む)
搬送システム
【課題】搬送車両の充電作業が搬送作業に与える影響を従来よりも低減すると共にバッテリの大型化を抑制する。
【解決手段】蓄電池によって駆動され、電力を外部から受電及び外部に給電する複数の搬送車両3と、搬送車両3が走行する複数の走行軌道1A,1Bと、ある走行軌道1Aと他の走行軌道1Bとが隣接するエリアであって、ある走行軌道1Aを走行する搬送車両3と他の走行軌道1Bを走行する搬送車両3とが給電/受電する受給電エリアKa,Kbとを具備する。
(もっと読む)
無人搬送システム
【課題】施工に手間がかかるとともに汚れや損傷に弱い分岐指示用部材を不要とし、無人搬送車を誘導ラインに沿って目的地まで確実に走行制御可能な、無人搬送システムを提供する。
【解決手段】無人搬送システム1は、分岐部G〜Jを有し複数の走行路を形成する複数の誘導ラインLと、誘導ラインに沿って走行する無人搬送車2と、誘導ラインを含む画像を撮像する撮像装置3と、この画像に関する画像情報に基づいて誘導ラインに沿って無人搬送車を現在地から目的地まで走行制御する走行制御装置4と、を備える。各誘導ラインは互いに異なる色の識別パターンからなる。走行制御装置は、現在地および目的地を結ぶ誘導ラインを設定し、画像の誘導ラインの識別パターンと設定した誘導ラインの識別パターンとを照合しながら、設定した識別パターンの誘導ラインに沿って無人搬送車を現在地から目的地まで走行制御するように、構成されている。
(もっと読む)
移動予測装置、ロボット制御装置、移動予測プログラムおよび移動予測方法
【構成】移動予測装置10は複数のLRF12およびロボット14を備える。また、予測移動装置10は、複数のLRF12によって人々の移動軌跡を記録し、分析することで短期的な移動の目標となる経由点vを空間に設定する。人の移動は複数の経由点を含む経由点系列によって表すことができ、この経由点系列は、そのときの移動時間tおよびその経由点系列の移動遷移確率pが関連付けられて、経由点リストLに記録される。そして、移動予測装置10は、経由点リストLを利用して、予測移動時間T後において、人が各経由点vへ到達する到達確率Pを算出する。
【効果】移動予測装置10は、各経由点vへの到達確率Pに基づいて、人が到達する位置を予測することができる。また、予測された到達位置または設定された各経由点vに基づいて、ロボット14の行動を決めることができる。
(もっと読む)
群ロボット制御システム、群ロボット制御装置、及び群ロボット制御方法
【課題】労力や訓練を必要とせずに、直感的に複数のロボットの整列制御を行うことができる群ロボット制御システムを提供する。
【解決手段】群ロボット制御システム100は、自走によって移動可能な複数のロボット101〜109と、線分を描くことで複数のロボット101〜109の整列パターンを入力するためのタッチパネル20と、タッチパネル20に入力された整列パターンに基づいて、複数のロボット101〜109の移動を制御するための制御信号を生成する制御信号生成部と、制御信号生成部にて生成された制御信号を複数のロボット101〜109に対して送信する制御信号送信部とを備えている。
(もっと読む)
生産効率化装置、生産効率化方法、コンピュータプログラム
【課題】被処理体に対する処理効率を向上させることができる生産効率化装置を提供する。
【解決手段】被処理体を処理する複数の処理装置2との間で情報を通信する第1通信手段と、前記複数の処理装置2間で被処理体を搬送する搬送装置32を有する搬送システム3との間で、該搬送装置32の制御に関わる制御情報を通信する第2通信手段と、前記第1通信手段にて通信した情報に基づいて、該情報の通信先の処理装置2が処理済の被処理体に対する搬出および未処理の処理体の搬入を要する搬送時機を予測する手段と、該手段が予測した搬送時機に前記情報の通信先の処理装置2へ前記搬送装置32が到着するように前記搬送システムへの制御情報を生成する生成手段とを生産効率化装置1に備える。
(もっと読む)
ロボットシステム
【課題】ネットワークデータブリッジおよび移動式ロボットを備えるロボットシステムが提供される。
【解決手段】ネットワークデータブリッジ202は、インターネットプロトコルネットワークに接続可能な広帯域ネットワークインターフェイスと、無線コマンドプロトコルネットワークに接続可能な無線コマンドインターフェイスと、広帯域ネットワークインターフェイス経由で受信するシリアルコマンドを抽出し、無線コマンドインターフェイス経由でブロードキャストするデータブリッジ構成要素と、を備える。また、移動式ロボット104は、ロボットを動かす駆動システムと、ネットワークデータブリッジから送信されるシリアルコマンドを受信する無線コマンド通信構成要素と、を備える。さらに、ネットワークデータブリッジは、製造者サーバおよび移動式ロボット間の通信のため、広帯域ネットワークインターフェイスを介して製造者サーバに接続可能である。
(もっと読む)
操舵制御装置
【課題】搬送車両に多数の車軸が設けられている場合でも、その搬送車両を走行経路に沿って円滑に走行させることができる操舵制御装置を提供すること。
【解決手段】本実施形態では、各走行装置5a〜5lの車軸6aに対して操舵角θ1〜θ12を設定する場合に、操舵角設定テーブル72cから、各操舵角θ1〜θ12を取得している。よって、計算式により各操舵角θ1〜θ12を算出する場合よりも、演算量を少なくできるので、CPU71の演算時間も短くできる。従って、本実施形態のように、走行装置5a〜5lの数が多い場合でも、CPU71に掛かる負担が大きくならず、演算時間も長くならない。故に、各操舵角θ1〜θ12の設定を短い周期で実行することができ、走行経路R上に沿って無人搬送車両1を円滑に走行させることができる。
(もっと読む)
電波計測システム
【課題】屋内エリアの地図データを作成し、作成した地図データに基づいて管理者により指定された経路を自律的に移動しながら電波環境データを測定する。
【解決手段】周囲の壁面までの距離を方位毎に測距する測距センサ207と、屋内エリア内に設置されたアクセスポイントからの電波の受信電力を予め定めた一定の時間間隔で測定する受信電力測定部203と、受信電力測定部203で測定された受信電力データの大きさを判定する受信電力判定部215と、測距センサ207により測距された測距データから屋内エリアの地図データを作成する地図データ作成部217と、サーバから与えられる走行データにより指定される走行経路に沿って自律的に自ロボットを走行させる走行手段208、209と、受信電力判定部215の判定結果に基づいて走行手段を構成するモータ209の回転速度を制御して自ロボットの移動速度を制御するモータ回転制御部216とを備える。
(もっと読む)
搬送車システム
【課題】左右の車輪を独立して駆動可能な搬送車において、曲線部走行時にモータの過負荷を防止する。
【解決手段】搬送車システムにおいて、速度パターン発生部62は、搬送車が曲線部を走行するときに2個の走行車輪に対して基準速度に対して内外輪にそれぞれ速度差が生じるように、速度指令を発生して2個のモータ26,29に与える。速度パターン発生部62は、搬送車が加速中に曲線部に進入することを光電センサ47が検出すれば、第1速度比率変化区間において、外輪となる走行車輪に対応するモータに対して進入時の加速度a01以下の加速度となるような速度指令を生成して与え、内輪となる走行車輪に対応するモータに対して外輪となる走行車輪の速度より速度差分以上を減らした速度となるような速度指令を生成して与える。
(もっと読む)
有軌道台車システム
【課題】有軌道台車システムにおいて、分岐点及び合流点を通過する台車の不要な速度低下や走行停止を抑制する。
【解決手段】有軌道台車システムは、分岐点及び合流点を含む所定領域内に誘導線を有する軌道と、軌道に支持されると共に案内されて走行する複数の台車とを備える。複数の台車の各々は、互いに周波数の異なる複数の信号を夫々発信可能な発信手段910,920と、発信手段から発信された複数の信号を誘導線へと夫々送信する送信手段810,820と、誘導線を介して伝達された複数の信号を夫々受信可能な受信手段710,720と、受信手段において受信された信号の種類に基づいて、台車の減速若しくは停止、又は走行の続行を判定する判定手段955と、判定手段における判定結果に応じて台車の走行を制御する制御手段960とを有している。
(もっと読む)
搬送用走行体の走行制御方法
【課題】地上側から作業区間WA内の全ての搬送用走行体1に対して走行可信号を確実に伝送する手段のコストダウン、実施の容易化を図る。
【解決手段】各搬送用走行体1には、作業区間WA内において前後に隣り合う搬送用走行体1間でデータ通信を行うデータ通信手段13,14と、地上側通信装置との間でデータ通信を行う機上側通信装置15が設けられ、前記作業区間WAの一端部には、通過する搬送用走行体1の前記機上側通信装置15に走行可信号を送信する地上側通信装置18a,18bが配設され、この地上側通信装置18a,18bから受信した走行可信号を、作業区間WA内を走行する他の全ての搬送用走行体1に前記データ通信手段13,14を介して伝送し、作業区間WA内の各搬送用走行体1を、受信した走行可信号に基づいて作業速度で自走させる。
(もっと読む)
搬送車
【課題】荷物の移送効率を低下させることなく載置された荷物が搬送中の荷物が搬送車から落下することを防止することのできる搬送車を提供する。
【解決手段】搬送車100の載置部102は、搬送対象である荷物が載置される部分であって、載置部102の側方に配置され載置部102からの荷物の落下を防止する落下防止体103と、載置部102の側方に配置される出現位置と本体部101側に配置される待避位置との間で落下防止体103を転換する転換手段104とを備える。
(もっと読む)
1 - 20 / 195
[ Back to top ]