
Fターム[5H301DD15]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体への指令の設定方法、設定手段 (1,386) | 無線により与えられるもの (358)
Fターム[5H301DD15]の下位に属するFターム
光により与えられるもの (42)
電波により与えられるもの (167)
音波により与えられるもの (15)
Fターム[5H301DD15]に分類される特許
1 - 20 / 134
遠隔操縦車両システム
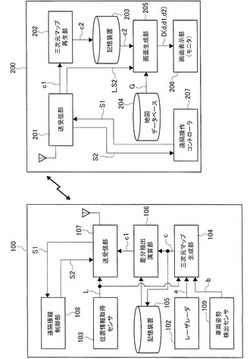
【課題】通信データ量を軽減して、遠隔操作部での表示遅れを防止する。
【解決手段】遠隔操縦車両100では、点群高さデータaと位置情報Lを基に、三次元マップ生成部104が三次元マップデータcを順次生成して出力する。差分抽出演算部106は、最新の三次元マップデータcと、一つ前の三次元マップデータcとの差分演算をして差分三次元マップデータc1を出力する。差分三次元マップデータc1と位置情報Lは、送受信部107から無線送信され、遠隔操作部200の送受信部201で受信される。差分三次元マップデータc1は、三次元マップ再生部202で順次加算されて再生三次元マップデータc2となる。画面生成部205では、記憶装置203に記憶された再生三次元マップデータc2と、地図データベース204から取り出した地図画面データGとを合成して表示画像データdを生成する。モニタ206には表示画像データdが表示される。
(もっと読む)
無人搬送車

【課題】SLAM技術を用いた無人搬送車であっても、古典的な誘導方法で走行する無人搬送車と同様に簡単な方法で走行制御の破綻を監視することができる無人搬送車を提供すること。
【解決手段】SLAM技術を用いて現在位置を求め、求められた現在位置を基に、予め設定されている経路データ123に沿って走行し、経路データ123と無人搬送車1の現在位置とのずれを補正するための旋回角θ及び無人搬送車1の進路方向が目標位置に向くための操舵角ρを無人搬送車1が経路データ123に沿って走行するように補正しながら制御する制御手段10と、制御手段10による補正量の変動を監視するとともに、補正量が外乱によって制御可能な範囲を逸脱したときに走行を停止する監視手段11とを備える。
(もっと読む)
リモートコントロール方法及びリモートコントロールシステム
【課題】コスト高を招くことなく、目視できない状況下でも、移動体を直感的に操縦できるリモートコントロール方法及びリモートコントロールシステムを提供する。
【解決手段】移動体20、は、常に操縦者HMの視線方向(基準方向)と平行に、その前方を向けており、よって例えば視線方向に対して右に角度δの方向に進行したい場合、それに応じた操舵量だけ進行方向を操作する操縦装置のスティックを視線方向に対して右に角度δの方向に倒せばよい。
(もっと読む)
処理設備
【課題】処理装置の制御負荷の増加を回避しながらも、処理作業効率の向上を図ることができる処理設備を提供する。
【解決手段】複数の処理装置1及び処理対象物を貯留する貯留装置Qを経由する搬送ラインに沿って走行して処理対象物を搬送する搬送車3を管理する搬送管理手段HCが、処理装置1から主管理手段JCに対して通信される処理進行情報を監視して、複数の処理装置1のうちで、処理対象物の処理が終了した又は終了間近である処理装置1を、主管理手段JCから搬送指令情報が通信されてくる以前に、事前搬送元として抽出し、その処理装置1から処理対象物を搬出するために、事前搬送元として抽出した処理装置1に対して搬送車3を走行させる事前搬送制御を実行するように構成されている。
(もっと読む)
無人搬送車および走行制御方法
【課題】運用が容易な無人搬送車および走行制御方法を提供する。
【解決手段】自身が走行する経路の情報である経路データ133に沿って走行する無人搬送車であって、自身の目的地に関する情報を取得し、現在位置を始点とし、目的地を終点として有する基本経路データ134がメモリデータ130に存在するか否かを判定し、存在しない場合、現在位置を始点として有する基本経路データ134をデータメモリ130から取得する取得処理と、取得した基本経路データ34の終点を新たな始点とする別の基本経路データ134をデータメモリ130から新たに取得して、終点を目的地に向けて、順に伸ばしていくつなぎ処理を、新たに取得した別の基本経路データ134の終点が、目的地に一致するまで実行し、取得した各基本経路データ134を経路データ133とするつなぎ処理部120を有することを特徴とする。
(もっと読む)
搬送システム
【課題】搬送車両の充電作業が搬送作業に与える影響を従来よりも低減すると共にバッテリの大型化を抑制する。
【解決手段】蓄電池によって駆動され、電力を外部から受電及び外部に給電する複数の搬送車両3と、搬送車両3が走行する複数の走行軌道1A,1Bと、ある走行軌道1Aと他の走行軌道1Bとが隣接するエリアであって、ある走行軌道1Aを走行する搬送車両3と他の走行軌道1Bを走行する搬送車両3とが給電/受電する受給電エリアKa,Kbとを具備する。
(もっと読む)
移動予測装置、ロボット制御装置、移動予測プログラムおよび移動予測方法
【構成】移動予測装置10は複数のLRF12およびロボット14を備える。また、予測移動装置10は、複数のLRF12によって人々の移動軌跡を記録し、分析することで短期的な移動の目標となる経由点vを空間に設定する。人の移動は複数の経由点を含む経由点系列によって表すことができ、この経由点系列は、そのときの移動時間tおよびその経由点系列の移動遷移確率pが関連付けられて、経由点リストLに記録される。そして、移動予測装置10は、経由点リストLを利用して、予測移動時間T後において、人が各経由点vへ到達する到達確率Pを算出する。
【効果】移動予測装置10は、各経由点vへの到達確率Pに基づいて、人が到達する位置を予測することができる。また、予測された到達位置または設定された各経由点vに基づいて、ロボット14の行動を決めることができる。
(もっと読む)
曲線ターンを辿るように複数のローターを有する回転翼無人機を操縦する方法
【課題】無人機が通常のターン経路上を飛行することを可能にする無人機の制御モードを提供する。
【解決手段】無人機10の各モーターは、姿勢及び速度の両方で無人機を操縦するために、異なる速度で回転するように制御可能である。遠隔制御装置16は、曲線経路に沿ってターンするコマンドを生成し、このコマンドは、左又は右ターン方向パラメーターと、ターンの曲率半径を規定するパラメーターとを含む。無人機は、上記コマンドを受信し、並びに、無人機の線形速度成分、傾斜の角度、及び角速度の瞬間測定値を取得する。受信したコマンド及び取得された測定値に基づいて、無人機のモーターを制御する制御ループの設定点値が生成され、これら設定点値は、地面に関連する座標系に対して無人機の水平線形速度及び傾斜を制御して、無人機に所定の接線速度uで曲線経路を辿らせる。
(もっと読む)
群ロボット制御システム、群ロボット制御装置、及び群ロボット制御方法
【課題】労力や訓練を必要とせずに、直感的に複数のロボットの整列制御を行うことができる群ロボット制御システムを提供する。
【解決手段】群ロボット制御システム100は、自走によって移動可能な複数のロボット101〜109と、線分を描くことで複数のロボット101〜109の整列パターンを入力するためのタッチパネル20と、タッチパネル20に入力された整列パターンに基づいて、複数のロボット101〜109の移動を制御するための制御信号を生成する制御信号生成部と、制御信号生成部にて生成された制御信号を複数のロボット101〜109に対して送信する制御信号送信部とを備えている。
(もっと読む)
有軌道台車システム
【課題】有軌道台車システムにおいて、軌道に配置されたマークを確実に検出する。
【解決手段】有軌道台車システムは、天井又は天井近傍に敷設された軌道100と、軌道に沿って走行する台車とを備える。台車は、軌道の走行面部上を走行する走行部210と、走行部から軌道の間隙を利用して懸垂される台車本体部220と、走行部及び台車本体部のうち一方に設けられる検出手段610と、走行部及び台車本体部のうち他方に設けられ、検出手段から照射された光を検出手段へと反射させる反射手段620とを有している。軌道は、所定位置における走行面部から、検出手段及び反射手段間の光路を遮るように間隙側に突出するマーク部630を有している。
(もっと読む)
無人車両の走行システムおよび走行経路生成方法
【課題】経由点を最適な地点に設定する。
【解決手段】走行経路10上にあって積込点12の手前のスイッチバック点13を、積込点12の位置移動に応じて位置移動する移動地点としてその初期位置情報を指示する。指示されたスイッチバック点13の初期位置情報と、積込点12の位置情報とに基づいて、積込点12とスイッチバック点13との相対位置関係Aの情報を生成する。積込点12の位置が移動すると、当該位置移動後の積込点12´の位置情報と、当該積込点12´における無人車両20´の向きの情報と、相対位置関係Aの情報とに基づいて、当該相対位置関係Aを維持できる位置に新たなスイッチバック点13´を設定し、新たなスイッチバック点13´を経て位置移動後の積込点12に至る走行経路10´を生成する。
(もっと読む)
自律移動サービス提供システム
【課題】券売機等で利用者によるサービス要求の呼出行為に応じて自律移動ロボットが利用者との間の本人照合を通して迅速に対応し、作業効率を高め、かつサービスの品質を高めることができる自律移動サービス提供システムを提供する。
【解決手段】この自律移動サービス提供システムは、所定の位置に居る利用者300の要望に応じて利用者との間で音声会話または表示情報を介して通信を行う手段23,24,26、利用者に係る音声データまたは画像データを取得する手段31,32,33、音声データまたは画像データと利用者の位置データを送信する手段28を備える専用端末200と、位置データに基づいて利用者の居場所までの移動経路を自動生成する手段52、利用者との間で音声会話または表示情報を介した通信に基づき本人照合を行う手段55、利用者の要求する案内サービスを提供する手段52を備える自律移動ロボット400とから構成されている。
(もっと読む)
自律移動体を用いた監視システム、監視装置、自律移動体、監視方法、及び監視プログラム
【課題】特徴検索機能を用いて適切な移動経路による巡回を行う。
【解決手段】監視区域を所定の経路で巡回する少なくとも1つの自律移動体と、該自律移動体を用いて前記監視区域を監視する監視装置とからなる監視システムにおいて、前記監視装置は、前記監視区域に設置された少なくとも1つの撮像手段により撮影された画像を用いて、特定人物を抽出する特定人物抽出手段と、前記特定人物抽出手段により得られた画像を撮影した撮像手段の位置情報から重要監視地点を選出する重要監視地点選出手段と、前記重要監視地点選出手段により得られる地点に対応させた巡回要求情報を生成し、生成した巡回要求情報を前記自律移動体に指示する巡回指示手段とを有し、前記自律移動体は、前記監視装置から得られる巡回要求情報と、予め設定された巡回経路とを用いて、巡回経路を設定する巡回経路設定手段を有する。
(もっと読む)
全方向移動体操作システムおよび全方向移動体操作方法
【課題】操作装置によって全方向移動体を簡易に遠隔で操作する。
【解決手段】全方向移動体500の車両目標速度計算部504は、操作対象である全方向移動体500の存在する車両位置Cを全方向移動体を操作する基準位置を示す操作体基準位置との相対的な位置関係により表わし、かつ、操作装置400に与えられる操作に応じた操作量を、操作体の位置を示す操作体基準位置Sを原点とする座標系において表わされる目標位置Oにより表わすことにより、この車両位置Cから目標位置Oまでの目標移動速度ベクトルを決定する。車輪速度指令演算部505は、この目標移動速度ベクトルに従って基体を駆動させるよう、車輪駆動部506に指示する。
(もっと読む)
搬送システム、および、台車割り付け方法
【課題】搬送システムにおいて自走式台車に搭載されるバッテリーの寿命を維持する。
【解決手段】バッテリー115を搭載し荷物を搬送する自走式の台車101と、充電ステーションと、管理手段とを備える搬送システムであって、バッテリー115の放電量を示す情報である放電量情報を作成する放電量作成部116と、バッテリー115に許容される放電量を示す情報である残量情報を放電量情報に基づき作成する残量作成部117と、要求される仕事に含まれる目的地の位置を示す情報である目的地情報と台車101の位置を示す情報である現在地情報とに基づき、要求される仕事に必要な放電量を示す情報である必要量情報を作成する必要量作成部と、残量情報から必要量情報を減じて得られる差が第一閾値を上回る場合、要求される仕事を台車101に割り付ける割付部とを備える。
(もっと読む)
無人搬送車および走行制御方法
【課題】自車位置の推定精度を向上させる無人搬送車および走行制御方法を提供することを目的とする。
【解決手段】計測データと地図データ132とのマッチングにおいて、不一致箇所が検出されても、その不一致箇所をマッチングの対象から除外するマスクエリア510を、地図データ132において設定することを特徴とする。無人搬送車の位置推定の際には、その不一致箇所を除外した計測データを用いる。マスクエリア510には、無人搬送車の走行エリアにおいて、レーザ距離センサで計測するたびに状況が変わるエリア(例えば、パレット置場や、充電器置場など)が設定されるのが望ましい。
(もっと読む)
走行車システム
【課題】走行車の走行経路レイアウトの自由度を上げる。
【解決手段】走行車システム1は、走行車10と、走行時給電装置60と、停車時給電装置70と、を備える。走行車10は、受電コア51と受電コア51に巻かれたピックアップコイル53とを含む受電ユニット23と、受電ユニット23を介して受けた電力を蓄えるバッテリ27と、を有する。走行時給電装置60は、走行車10の走行時に、受電ユニット23に対向して非接触にて受電ユニット23に給電する一対の給電線63を有する。停車時給電装置70は、受電ユニット23に対向する給電コイル79を有し、走行車10の停止時に非接触にて受電ユニット23に給電する給電部75を有する。
(もっと読む)
移動ロボットの遠隔操縦のための衝突防止装置及び方法
【課題】遠隔操縦のための衝突防止装置及び方法に係り、ユーザに移動ロボットの移動に関する情報を容易に伝達する。
【解決手段】移動ロボットに装着されたカメラで撮影した映像を所定の時間差で保存して比較してオプティカルフローを計算し、FOEを計算する。また、移動ロボットの移動速度及び移動方向についての情報を獲得する。計算されたFOEと、移動速度及び移動方向と、を利用して、移動ロボットの走行方向に存在する障害物を感知し、感知された障害物に衝突するまでに要するTOCを計算し、そのTOCを利用して障害物に移動ロボットが衝突する可能性がある衝突予想領域を計算する。その計算結果に基づいて、画面に表示される衝突予想領域にマッピングするカラーの情報を生成する。具体的には、計算されるTOCの値によってカラーの色調を調整し、TOCの値が小さければカラーの点を濃くし、TOCの値が大きければカラーの点を薄くする。
(もっと読む)
障害物回避支援装置、障害物回避支援方法及び移動体
【課題】最近接距離の点の切り替わりが発生する状況において、移動体の障害物の回避動作を支援するのに好適な障害物回避支援装置、障害物回避支援方法及び障害物回避支援装置を備えた移動体を提供する。
【解決手段】障害物回避支援部101を、レーザーレンジセンサ200で測定した障害物の距離情報をメモリに記憶する距離情報記憶部110と、メモリに記憶された距離情報に基づき斥力を計算する斥力計算部111と、計算された斥力を軸方向の成分に分離する斥力成分分離部112と、分離された軸成分から軸毎に正方向の最大値と負方向の最大値とを抽出し、軸毎に抽出した正方向と負方向の最大値の和を計算し、計算結果を各軸の軸成分とした回避用斥力を生成する回避用斥力生成部113とを含む構成とした。
(もっと読む)
無人搬送車走行方法及び無人搬送車走行システム
【課題】合流点や交差点での無人搬送車の待ち合わせの発生を抑えることができる無人搬送車走行方法及び無人搬送車走行システムを提供する。
【解決手段】無人搬送車走行システム1は、複数台の無人搬送車(AGV)2と、コントローラ6と、メモリ8とを備えている。無人搬送車2は、予め決められた走行経路に沿って走行し、移載装置に荷物を搬送する。メモリ8には、無人搬送車2が走行する走行経路を複数のブロックに分割してなる走行経路ブロックデータが設定記憶されている。コントローラ6は、無人搬送車2により搬送される荷物が移載装置に到着する予定時刻を計算し、出発地ブロックから目的地ブロックまでの各ブロックにおける無人搬送車2の通過時刻を、目的地ブロックから出発地ブロックに向かって順次予約していき、無人搬送車2が走行を開始する時刻を求め、その走行開始時刻のデータを当該無人搬送車2に送信する。
(もっと読む)
1 - 20 / 134
[ Back to top ]