
Fターム[5H301GG03]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体上に設けられた検出手段 (3,259) | 位置認識用固定設備検出用撮像手段 (117)
Fターム[5H301GG03]に分類される特許
1 - 20 / 117
ロボット掃除機及びその制御方法
【課題】ロボット掃除機及びその制御方法を提供する。
【解決手段】ロボット掃除機の制御方法は、第1の掃除モードに従って、前記ロボット掃除機の位置を基準にして多数の掃除領域を定義すること;及び定義された前記掃除領域別に順次掃除を行うこと;を含む。本発明のロボット掃除機及びその制御方法によると、繰り返しモードが開始され、ロボット掃除機の位置を基準にして多数の掃除領域を定義し、掃除領域別に順次掃除を行うとき、基準壁面の検出可否によってロボット掃除機が属した掃除領域を再設定し、再設定された掃除領域内で走行経路に沿って移動しながら掃除を行うので、掃除が1回も行われていない領域や掃除の重複領域を減少させることができる。また、掃除が1回も行われていない領域や掃除の重複領域を減少させることによって、ロボット掃除機の掃除効率を向上させることができる。
(もっと読む)
改札案内ロボット

【課題】自動改札機でICカードをうまく使えない利用者に対して再タッチ行為を行えるように迅速に、丁寧に、分かりやすく応対できる改札案内ロボットを提供する。
【解決手段】改札案内ロボット10は、自律移動型の装置構成(12,43,44)と案内情報提供部(22)とロボット制御装置41を備え、必要が生じたときに自動改札機31に接近してその改札機能を補助・支援する。自動改札機の無線通信装置37と間で相互に情報の送受を行う無線通信装置42と、ICカードリーダ・ライタと、ICカード処理装置45とを備える。自動改札機でICカード処理未了が生じたとき、自動改札機からの出動指令に基づいて自動改札機に接近し、通行不能状態にある利用者に対し案内情報提供部を介して自身のICカードリーダ・ライタへのICカードタッチ行為を促す。
(もっと読む)
推定装置、推定方法、および推定プログラム
【課題】移動体が特定の領域に位置する場合の推定精度の向上を図ること。
【解決手段】推定装置は、粒子フィルタを用いたシミュレーションにより、直前の移動体の状態を示す粒子群から、現在の移動体の状態を示す粒子群psを推定する。次に、推定装置は、推定された現在の移動体の状態を示す粒子群psに加えて、危険領域Dの近傍領域の状態を示す心配粒子群asを生成する。そして、推定装置は、推定された粒子群psと生成された心配粒子群asとの各粒子の尤度に基づいて、粒子群psをリサンプリングする。これにより、推定装置は、移動体の真の位置が危険領域の近傍領域にある場合に、移動体の位置の推定精度の向上を図ることができる。
(もっと読む)
走行車両
【課題】旋回後の進入位置合わせを行える自動走行制御機能を備えた農業用の走行車両を提供すること。
【解決手段】ステアリングハンドルに連動して正転と逆転をするステアリングシャフト15の切れ角を検出する切れ角センサ49と該シャフト15に回転駆動力を伝達するための正逆転モータ20とモータ20の回転駆動力をシャフト15に伝達するための電磁クラッチ22を有する連動機構を備えた自動操舵装置25とカメラ53で圃場内の遠目標X及び/又は作業軌跡Tを検出してモニタ47に表示可能とし、自動スイッチの「入」操作時時に、前記切れ角センサ49が所定量のシャフト切れ角を検出して車両の旋回が行われたと判断されると、モニタ47で表示される旋回後の遠目標Xの位置情報及び/又は作業軌跡Tの位置情報に基づき自動操舵装置25のモータ20を作動させて圃場内で直進走行の自動操舵を行う制御構成を有する制御装置100を備えた走行車両である。
(もっと読む)
対象物との相対位置計測方法と装置
【課題】向きの変更と移動の少なくとも一方を行う動作体から、対象物との相対位置を高精度に計測できる手段を提供する。
【解決手段】動作体3に設置したレーザ距離センサにより、各被計測点の位置を動作体座標系で表わされた座標値を取得する。動作体3に設置した撮像装置により、対象物5が含まれる領域を撮像して画像を生成する。画像において、対象物5に取り付けられた指標の位置を特定し、この位置に基づいて、撮像時において対象物5の方向を特定する。距離計測時の動作体3の向きと位置に対する撮像時の動作体3の相対的な向きθと位置Δx,Δyに従って、各被計測点の座標値を、距離計測時の動作体座標系の座標値から撮像時の動作体座標系の座標値に変換する。画像内の指標の位置に対応する、変換後の座標値を特定し、この座標値に基づいて、撮像時における動作体3から対象物5までの距離を求める。
(もっと読む)
位置姿勢出力装置、位置姿勢出力プログラム及び位置姿勢出力方法
【課題】移動体の正確な位置および姿勢を時間遅れなく出力する。
【解決手段】位置姿勢出力装置10は、移動体のオドメトリを計算する計算部3から、オドメトリを第1の間隔で取得する。オドメトリ及びオドメトリ以外の情報を用いて移動体の位置及び姿勢を推定する推定部5から、移動体の位置及び姿勢の推定結果を第1の間隔より長い第2の時間間隔で取得する。移動体の位置及び姿勢の推定結果が取得された場合に、更新後の移動体の位置及び姿勢の値が、オドメトリの差分に基づく位置及び姿勢と、移動体の位置及び姿勢の推定結果との間に遷移するように、記憶部13に記憶された移動体の位置及び姿勢を更新する。オドメトリが第1の間隔で取得される度に、当該オドメトリと今回の推定に用いられたオドメトリとの差分を記憶部13に記憶された移動体の位置及び姿勢に足し合わせた上で出力する。
(もっと読む)
車両および車両制御プログラム
【課題】搭乗者の進行したい方向を正確に汲み取りながら走行予定軌道を選択して自動走行を行うことができる車両および車両制御プログラムを提供すること。
【解決手段】第3車両位置予測処理(S107)によって、ステアリングホイール13の回転角速度Δδを取得してステアリングホイール13の操舵角を算出し、そのステアリングホイール13の操舵角から前輪2FL,2FRへ付与される操舵角を算出して、その前輪2FL,2FRへ付与される操舵角と車両速度とに基づいて車両1のヨーレートを推定し、その推定したヨーレートから所定時間後の車両位置を予測する。これにより、搭乗者の進行したい方向を、所定時間後の車両位置まで特定して把握しているので、予測された車両位置に基づいて走行軌道を選択することによって、搭乗者の進行した方向を正確に汲み取りながら走行予定軌道を選択して、自動走行を行うことができる。
(もっと読む)
無人車両および無人搬送システム
【課題】撮像手段が2つだけであっても姿勢角を修正しながら全方向に走行可能な無人車両および該無人車両を備えた無人搬送システムを提供する。
【解決手段】無人車両10は、それぞれ領域A1、A2の画像データを出力する2つの撮像手段11a、11bと、画像データに基づいて姿勢角を算出する姿勢角算出部と、姿勢角がゼロになるように車輪15の操舵角を制御する操舵制御部とを備える。姿勢角算出部は、第1方向に走行する際は、2つの撮像手段11a、11bから出力される2つの画像データにおける誘導ラインの位置に基づいて姿勢角を算出し、第2方向に走行する際は、1つの撮像手段11aから出力される1つの画像データにおける誘導ラインの位置に基づいて姿勢角を算出するか、または2つの撮像手段11a、11bから出力される2つの画像データにおけるマーカの位置に基づいて姿勢角を算出する。
(もっと読む)
無人搬送システム
【課題】停止マークの汚れや欠けに強い無人搬送システムを提供する。
【解決手段】本発明に係る無人搬送システムは、路面に敷設された誘導ライン2と、誘導ライン2上に設けられた停止マーク3と、誘導ライン2に沿って走行するとともに、停止マーク3を目印にして停止する無人搬送車とを備えたシステムである。停止マーク3は、誘導ライン2とは異なった色で着色された部分(3b、3d)を有し、色の違いにより交差する2本の線X、Yを認識させ得るようになっている。また、無人搬送車は、該2本の線X、Yの交点を目印にして停止するよう構成されている。
(もっと読む)
移動予測装置、ロボット制御装置、移動予測プログラムおよび移動予測方法
【構成】移動予測装置10は複数のLRF12およびロボット14を備える。また、予測移動装置10は、複数のLRF12によって人々の移動軌跡を記録し、分析することで短期的な移動の目標となる経由点vを空間に設定する。人の移動は複数の経由点を含む経由点系列によって表すことができ、この経由点系列は、そのときの移動時間tおよびその経由点系列の移動遷移確率pが関連付けられて、経由点リストLに記録される。そして、移動予測装置10は、経由点リストLを利用して、予測移動時間T後において、人が各経由点vへ到達する到達確率Pを算出する。
【効果】移動予測装置10は、各経由点vへの到達確率Pに基づいて、人が到達する位置を予測することができる。また、予測された到達位置または設定された各経由点vに基づいて、ロボット14の行動を決めることができる。
(もっと読む)
移動動作決定装置、その方法及びプログラム
【課題】簡素化された構成で確実に障害物を回避し、移動体の最適な経路を決定すると共に、様々な目的に応じた適応的な行動選択を行うことができる移動動作決定装置等を提供する。
【解決手段】検出対象物の大きさに応じてポテンシャルを設定するポテンシャル設定部21と、検出領域を区画する区画検出領域のうちポテンシャルを含んでいる区画検出領域を特定する区画検出領域特定部22と、区画検出領域ごとに、含まれるポテンシャル値を検出値として算出する検出値算出部23と、区画検出領域の組み合わせ検出パターン、及びそれに対応する出力動作を動作設定情報として記憶する動作設定情報記憶部27と、動作設定情報の組み合わせ検出パターンとを比較して、移動体10の出力動作を特定する出力動作特定部24と、特定した出力動作に対して、検出値に基づいて出力動作を最適化して決定する動作決定部25とを備える。
(もっと読む)
推定位置評価システム及びプログラム
【課題】推定位置評価システム及びプログラムにおいて、推定環境地図上の任意の地点で推定した自己位置が、実環境地図上の実際の位置からどの程度ずれているかを比較的簡単に、且つ、精度良く評価することを目的とする。
【解決手段】ロボットが移動経路を挟む特徴点ペアの間を通過する時の自己位置推定結果を求め、特徴点ペアの推定環境地図上の座標値と、ロボットが特徴点ペアの間を通過する時のロボットの座標値を基準とした位置情報とに基づいて、推定環境地図上のロボット位置を計算し、推定環境地図上のロボット位置と自己位置推定結果を比較することでロボットの自己位置推定を評価するように構成する。
(もっと読む)
飛行体の飛行制御システム
【課題】簡便に而も高精度に飛行体の高さ位置の測定を可能とし、無人飛行時の飛行体の飛行高度を適正に制御可能とした飛行制御システムを提供する。
【解決手段】飛行体と、該飛行体に設けられた航行手段8,9,10,11と、位置測定部17と、前記航行手段を制御する飛行制御部18と、前記位置測定部と前記飛行制御部とを制御する主演算制御部19とを具備し、前記位置測定部は飛行体の地上座標を測定するGPS装置23と、飛行体下方のデジタル画像を撮像する鉛直カメラ13とを有し、該鉛直カメラにより撮像した2地点の画像と、前記GPS装置により測定した2地点の地上座標と、前記鉛直カメラの焦点距離に基づき前記飛行体の高度を測定し、前記主演算制御部は測定された高度に基づき前記飛行制御部を介して前記航行手段を制御し、前記飛行体を所定の高度で飛行させる。
(もっと読む)
移動装置およびロボットならびにこれらの制御システム
【課題】制御対象の状況に鑑みて、時空間座標系における当該制御対象の目標軌道を適当な形態で探索することができるシステム等を提供する。
【解決手段】時空間座標系における第1基準点q1(k)および第2基準点q2(k)の初期位置関係(k=1)が、アクチュエータ2の動作性能に応じた「第1条件」を満足するように設定される。前回軌道候補tr(k−1)が物体軌道troに接触すると判定された場合、時空間座標系における第1基準点q1(k)および第2基準点q2(k)の今回位置関係(k>1)が第1基準点q1(k)および第2基準点q2(k)の今回時間間隔が前回時間間隔よりも長くなる等の「第2条件」を満足するように設定される。
(もっと読む)
移動体
【課題】演算コストを低減して自己位置同定を行う。
【解決手段】移動体10は、自己位置同定手段120、周囲の環境を計測する環境計測手段110、障害物マップ生成手段130、目的地までの移動経路を生成する経路計画手段140、経路を走行するための制御信号を生成する追従制御手段150、制御信号に基づいて駆動する駆動手段160、及び移動体10の加速度を計測する加速度計測手段190を備える。自己位置同定手段120は、障害物マップに記録された障害物の位置を通過した場合と、加速度が閾値を超えた場合と、経路の曲率が閾値以上の箇所を通過した場合と、制御信号と駆動手段の駆動状態との比較によりスリップが生じていると判定した場合と、地図とのマッチングによる自己位置の同定から所定の時間が経過した場合または所定の距離だけ走行した場合と、のいずれかに該当した場合に、地図とのマッチングにより自己位置の同定を行う。
(もっと読む)
移動ロボット
【解決手段】移動ロボット10は、移動速度データベース88を含み、人と共存する様々な環境内を自律的に移動する。移動速度データベース88には、人の移動速度の傾向を表す代表値に応じて定められる最大移動速度が、環境内の各エリアのそれぞれと対応付けて記憶される。移動ロボット10は、移動する際には、現在地に対応する最大移動速度を移動速度データベース88から読み出して設定し、設定した最大移動速度を上限とした移動速度となるように移動する。
【効果】周囲の人と調和した移動が可能となるので、周囲の人の邪魔になることなくスムーズに移動できる。
(もっと読む)
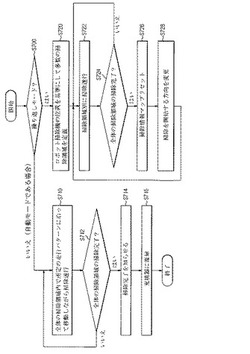
走行制御装置
【課題】車両を目標位置まで自律走行させる場合に、車両が目標位置へ到着する可能性を向上させることができる走行制御装置を提供すること。
【解決手段】走行制御装置100は、車両1の走行中に、前回の補正が行われた時に設定された直線距離daと、現在の車両1の車両位置から目標とする駐車位置Oまでの直線距離dnとを比較し、直線距離dnが直線距離daよりも短くなる場合に、目標とする駐車位置Oの再認識を試みる。これにより、車両1が目標位置Oに近づく度に、目標とする駐車位置Oを再認識できるので、再認識された駐車位置O’に含まれる誤差を徐々に(段階的に)低下させることができる。よって、目標とする駐車位置Oの特定精度を徐々に(段階的に)向上させることができるので、車両1が目標とする駐車位置Oに到着する可能性を向上させることができる。
(もっと読む)
移動ロボットの遠隔操縦のための衝突防止装置及び方法
【課題】遠隔操縦のための衝突防止装置及び方法に係り、ユーザに移動ロボットの移動に関する情報を容易に伝達する。
【解決手段】移動ロボットに装着されたカメラで撮影した映像を所定の時間差で保存して比較してオプティカルフローを計算し、FOEを計算する。また、移動ロボットの移動速度及び移動方向についての情報を獲得する。計算されたFOEと、移動速度及び移動方向と、を利用して、移動ロボットの走行方向に存在する障害物を感知し、感知された障害物に衝突するまでに要するTOCを計算し、そのTOCを利用して障害物に移動ロボットが衝突する可能性がある衝突予想領域を計算する。その計算結果に基づいて、画面に表示される衝突予想領域にマッピングするカラーの情報を生成する。具体的には、計算されるTOCの値によってカラーの色調を調整し、TOCの値が小さければカラーの点を濃くし、TOCの値が大きければカラーの点を薄くする。
(もっと読む)
ランドマーク検知方法、ロボット及びプログラム
【課題】ランドマーク検知方法、ロボット及びプログラムにおいて、ランドマークの検知精度を向上させることを目的とする。
【解決手段】自律走行型ロボットからランドマークを検知するランドマーク検知方法において、ロボット内でカメラが出力する撮像画像に基づいてランドマークの特徴点の特徴ベクトルを生成し、前記特徴ベクトルとランドマーク登録時の特徴点の特徴ベクトルとに基づいてマハラノビス距離を計算し、前記マハラノビス距離が最小の特徴ベクトルを選択してランドマークの検知結果とし、ロボットの移動量と正規分布誤差に基づいてロボットの現在位置の候補を求め、前記ロボットの現在位置の候補について、登録されているランドマークの位置との整合性を評価して評価結果を出力し、前記ロボット位置の候補の座標に前記評価結果に応じて重み付け平均を計算してロボットの推定位置を得るように構成する。
(もっと読む)
移動体位置検出システムおよび方法
【課題】ポールスターアルゴリズムを用いた際の照合不良を起こし難くして、検出の信頼性を確保した移動体位置検出システムおよび方法を提供する。
【解決手段】平面12上を移動する移動体16の位置を検出する移動体位置検出システム10であって、撮像手段20により取得した画像中のドットと、このドットに対応するポールスターデータベース34中のドットとの間の誤差を吸収するための尤度を設定したポールスター特徴量を用いてポールスター照合を行うポールスター照合手段24と、ポールスター照合手段24により照合された照合ドット候補から所定の照合ドットに絞り込む絞り込み手段26と、絞り込み手段26により絞り込んだ所定の照合ドットからなるドットパターンの位置関係に基づいて、移動体16の現在位置および方向を検出する検出手段28とを備えるようにする。
(もっと読む)
1 - 20 / 117
[ Back to top ]