
Fターム[5H301GG05]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体上に設けられた検出手段 (3,259) | 走行基準物、障害物、作業対象の検出手段 (1,655)
Fターム[5H301GG05]の下位に属するFターム
接触式検出手段であるもの (105)
非接触式検出手段であるもの (1,408)
Fターム[5H301GG05]に分類される特許
1 - 20 / 142
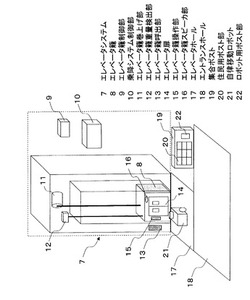
自律移動ロボットのエレベータ乗降方法
【課題】周囲の環境などに影響されずに、エレベータ籠内の状態を感知し、人との共用を排他的に制限し、人のエレベータ利用時の安全性向上を図ることを目的とする。
【解決手段】上記目的を達成するために、本発明は、エレベータ籠に乗降して複数の階にわたる領域を自律的に移動する自律移動ロボットとエレベータ装置によるエレベータ乗降システムであり、前記自律移動ロボットは自身の周囲の環境を検出する環境センシング手段と、後述の乗降システム制御部と所定の信号の送受信を行なう無線通信手段を備え、前記エレベータ装置はエレベータ籠とエレベータへの搭乗するためにエレベータ籠を呼び出すエレベータ籠呼出部とエレベータ搭乗の出入口となるエレベータ扉とエレベータ籠の重量を検出するエレベータ籠重量検出部と、エレベータ籠を上下移動させるためのエレベータ籠巻上げ部とを備えることを特徴とする。
(もっと読む)
自動車の運転者をサポートするための方法
本発明は、操車時に自動車の運転者をサポートするための方法に関する。はじめに自動車の周辺を検出し(3)、当該検出された周辺に基づいて、操車を行うための少なくとも1つの適切な軌道を計算し、操車を行うために自動車を自動的に制御する(5)。障害時には、自動車制御が終了したことを運転者に知らせ(11)、運転者は指示を得て、この指示に基づいて操車を続ける。 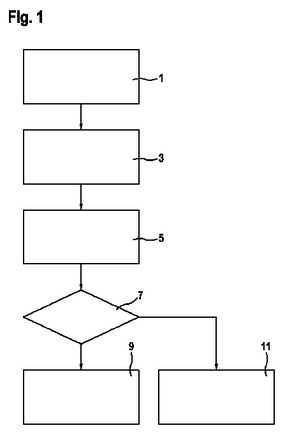 (もっと読む)
(もっと読む)
スキッド・トゥ・ターン飛しょう体及びスキッド・トゥ・ターン飛しょう体のロール制御方法

【課題】要求される旋回性能を低コストにて満足させるスキッド・トゥ・ターン飛しょう体を提供する。
【解決手段】ジンバル機構112をジンバル機構112の優位な回転方向と、機体の優位な旋回方向とが一致するように機体に設置する。また、追跡目標の進行方向が機体の優位な旋回方向と一致するように機体のロールを制御するロール制御装置を備える。操舵翼132の回転軸と第1のジンバル機構112の回転軸とが機体後方から見たときに45°又は0°をなしている。
(もっと読む)
音声認識装置、ロボット、音声認識方法、プログラム及び記録媒体
【課題】音声認識の精度を向上させる音声認識装置、ロボット、音声認識方法、プログラム及び記録媒体を提供する。
【解決手段】音声を入力する音声入力手段と、入力された音声の到来方向を検出し、音源方向検出結果を出力する音源方向検出手段と、入力された音声に発話区間を検出し、発話区間に対し認識処理を行い、音声認識結果を出力する音声認識手段と、音声認識手段が音声検出中であるか否かを出力する音声検出状態取得手段と、音声検出中でない場合は音源方向検出手段から出力された音源方向検出結果を出力し、音声検出中である場合は音声検出中でなくなるまで音源方向検出結果の出力を抑制する出力判定手段と、出力判定手段から出力された音源方向検出結果、若しくは音声認識手段から出力された音声認識結果の少なくともいずれかに従って動作を行う動作手段と、を備えることを特徴とする。
(もっと読む)
移動体
【課題】取り扱い容易で破損の危険性の低い移動体を提供する。
【解決手段】移動体1の本体部10は左クローラユニット12Lと右クローラユニット12Rをハウジング11で連結したものである。本体部10の上面にはカメラユニット20と運搬用ハンドル30が設けられる。運搬用ハンドル30の最上位箇所はカメラユニット20の最上位箇所以上の高さとなっており、移動体1が転倒したとき、運搬用ハンドル30はカメラユニット20の保護の役割を果たす。運搬用ハンドル30は本体部10の重心CGよりもカメラユニット20寄りに設けられている。ハウジング11と左右クローラユニット12L、12Rの境界で、それぞれの外殻板同士が合わさって板が二重になった箇所に、運搬用ハンドル30の根元が固定される。運搬用ハンドル30の側面には障害物センサ25が設置される。
(もっと読む)
自律移動ロボット及び地図更新方法
【課題】誤認識を含む精度の低い地図によって環境地図が更新されることを防止する。
【解決手段】移動空間内を移動する自律移動ロボット1は、更新箇所判定部18、画像表示部20、採否指示入力部22及び地図更新部23を備える。更新箇所判定部18は、新環境地図131と旧環境地図130とを比較して更新箇所を判定する。画像表示部20は、更新箇所に対応する移動空間内の地点が撮影された撮影画像を表示する。採否指示入力部22は、オペレータによる前記更新箇所の採否指示を入力する。地図更新部23は、オペレータの採否指示に従って更新箇所が採用又は棄却された更新後の環境地図を生成する。
(もっと読む)
遠隔制御装置
【課題】被遠隔制御対象体を直感的かつ容易に遠隔制御できる遠隔制御装置を提供する。
【解決手段】遠隔制御装置1は、自走車100とコントローラ200と演算部140,240とを備え、自走車100は、第1の方位基準点101に対する第2の方位基準点102の方位を検知するための方位センサ120を有し、コントローラ200は、第3の方位基準点201に対する第4の方位基準点202の方位を検知するための方位センサ220と、第3の方位基準点201を基準として、自走車100を移動させる移動方向を演算部240に入力するための操作用レバー260とを有し、演算部140,240は、方位センサ120によって検知された方位と、方位センサ220によって検知された方位と、操作用レバー260によって入力された移動方向とに基づいて、自走車100を、第1の方位基準点101を基準として移動方向に向かって移動させるように制御する。
(もっと読む)
座標補正方法、座標補正プログラム、及び自律移動ロボット
【課題】2つの環境地図の間の姿勢ずれを補正することで、一方の環境地図上の点を他方の環境地図の座標系に合わせて座標変換する処理を、自動的に、かつ少ない計算量で行なうことを可能とする。
【解決手段】(a)一方の環境地図の座標系を並進又は回転させることにより、一方の環境地図の姿勢を変動させ、(b)一方の環境地図に含まれる移動不可能な領域である複数の障害物セルの各々について、姿勢変動後の一方の環境地図の各障害物セルから、他方の環境地図における最寄りの障害物セルまでの距離を求める。(c)複数の障害物セルについて算出した最寄りの障害物セルまでの距離の合計値を目的関数として最適化計算を行い、目的関数が最適化される一方の環境地図の姿勢を決定する。(d)最適化計算により得られた一方の環境地図の姿勢に基づいて、2つの環境地図のうちの一方の地図上の座標を、他方の地図上の座標に座標変換する。
(もっと読む)
自走式機器およびそのプログラム
【課題】同じ走行空間を繰り返し走行させる場合に、轍の軽減を図り、安定走行ができる自走式機器を提供することを目的とする。
【解決手段】機器本体100を移動させる移動手段102と、機器本体100のコントロール手段101と、電池104と、障害物を検出する障害物検出手段103とを備え、コントロール手段101は、壁面に沿うように機器本体100を移動させる場合、移動毎に壁面を沿うように移動する走行内容を自動的に切替えるようにした。これによって、自動切替えで、繰り返し同じところを走行することを防ぎ、自走式機器の走行による轍の発生を低減することができる。したがって、轍を作ってしまい一部の地面や床面の劣化を早めることをなくすとともに、生じた轍によって見栄えを悪くしたり、メンテナンス時期を早めたりすることをなくし、安定走行ができる。
(もっと読む)
充電制御装置、充電制御システム及びそれらに用いる充電制御方法並びにそのプログラム
【課題】 自律型駆動装置がバッテリ切れで動作不能となることを事前に防ぎ、充電ステーションでの充電作業をスムーズに行うことが可能な充電制御装置を提供する。
【解決手段】 充電制御装置(1)は、自律型駆動装置のバッテリ状況及び消費電力を管理する管理手段(充電管理部111)と、自律型駆動装置におけるバッテリ切れを起こす時期を事前予測する予測手段(バッテリ切れ時間予測部112)と、管理手段で管理する情報及び予測手段の予測結果を基に充電ステーションにおける自律型駆動装置のバッテリへの充電のスケジュールを作成する作成手段(充電スケジューリング部114)と、作成手段で作成されたスケジュールを自律型駆動装置及び充電ステーションに通知する手段(ロボット通信部13及び充電ステーション通信部14)とを有する。
(もっと読む)
搬送システム、及び搬送システムの制御方法
【課題】搬送システムにおいて、簡単な構成で、確実に搬送車同士が衝突してしまうことを防止する。
【解決手段】搬送システムは、合流箇所を有する軌道(100)と、軌道を夫々走行する複数の搬送車(210、220)と、搬送車の走行方向を基準として、軌道のうち少なくとも合流箇所の手前にある二つの軌道部分の各々の左側の縁に設けられた左部及び右側の縁に設けられた右部を有し、二つの軌道部分の一方における左部及び他方における右部間並びに一方における右部及び他方における左部間で、信号を伝達可能な伝達手段(310、320)とを備える。搬送車は、信号を右部及び左部の一方を介して送信する送信手段(410、420)、並びに信号を右部及び左部の他方を介して受信する第1受信手段(510、520)及び信号を右部及び左部の一方を介して受信する第2受信手段(610、620)を備える。
(もっと読む)
経路探索システム、経路探索方法、及び自律移動体
【課題】広範な移動空間であっても、高速かつ正確に最適な経路を高速で探索することができる経路探索システム、経路探索方法、及び自律移動体を提供すること。
【解決手段】本発明にかかる経路探索システム1は、移動空間を、領域に含まれる任意の2点間に経路が存在するように、複数の領域に分割し、各領域に対してノードを設定すると共に、各領域間の隣接関係に従ってノード間をリンクで接続することで、ノード及びリンクから構成されるトポロジーマップを生成するトポロジーマップ生成手段21と、生成されたトポロジーマップにおいて、経路を探索するトポロジーマップ経路探索手段22と、トポロジーマップ経路探索手段21により探索されたトポロジーマップ上の経路に対応する移動空間の領域において、移動始点Sより移動終点Gに到達する経路を探索する移動空間経路探索手段23とを備えるものである。
(もっと読む)
自律走行装置およびプログラム
【課題】充電器の給電端子と装置本体の受電端子の酸化により接触抵抗が増加した場合であっても、充電池の充電をすることができる自律走行装置を提供することを目的とする。
【解決手段】充電時に、装置本体1を左右に回転動作させ充電器10の給電端子11と装置本体1の受電端子6をすり合わせるようにしたものである。これによって、充電時のすり合わせで給電端子11と受電端子6の酸化による接触抵抗増加を防ぎ、充電池7の充電をすることができる。
(もっと読む)
搬送車の走行制御装置
【課題】無人運転モードにおいて乗車した作業者(運転者)による車両操作の介入を防止し、無人運転モードによる走行の信頼性を向上させること。
【解決手段】無人運転モード時において、運転者が検出される条件、パーキングブレーキが操作されたことが検出される条件、常用ブレーキが操作されたことが検出される条件、及びアクセルレバーが所定の操作態様で操作されたことが検出される条件のうち何れか一つの条件を満たした場合、走行中のときには停止させる車両停止制御を実行し、停止中のときには車両の発進を禁止する発進禁止制御を実行する(ステップS13〜S16)。
(もっと読む)
搬送システム、配車管理装置及び方法、並びにコンピュータプログラム
【課題】ビークル等の搬送車を用いた搬送システムにおいて、配車を効率的に行う。
【解決手段】搬送システム(100)は、被搬送物に対して各種処理を施す作業装置(3)を含んで夫々構成される複数の集合の各々の内部及び該複数の集合の相互間で、被搬送物を搬送する。搬送システムは、複数の搬送車(2)と、前記内部及び前記相互間で搬送車を移動させる移動手段(11)と、将来の一時点又は時期において前記内部の各々で被搬送物を搬送するために要求される予定の複数の搬送車の台数を特定する予定台数特定手段(4)と、該特定された台数に基づいて、搬送車を前記相互間で移動させるように、移動手段を制御する制御手段(6)とを備える。
(もっと読む)
自律移動装置
【課題】特定の人が他の人とグループを構成する状況を考慮した自律移動装置を提供する。
【解決手段】自律移動装置1は、特定の人の近くにいる他の人が特定の人と共に移動するグループに属しているか否かを判定するグループ判定手段23と、自律移動装置が特定の人を追従するエリアである自装置追従エリアの情報を取得する自装置追従エリア取得手段21aと、他の人に追従する他の自律移動装置が他の人を追従するエリアである他装置追従エリアの情報を取得する他装置追従エリア取得手段22aと、グループ判定手段により他の人がグループに属していると判定され、且つ、自装置追従エリアの一部が他装置追従エリアと重複する場合に、他装置追従エリアと重複しない位置において自律移動装置を特定の人に追従させる追従制御手段24,26と、を備える。
(もっと読む)
ロボット制御装置及び方法
【課題】ロボットが追従対象を見失った場合に、追従対象の移動予測を行うことにより追従を続行できるロボット制御装置を提供する。
【解決手段】追従対象を検出するセンサ及び追従対象に追従する移動手段を備えたロボットの制御装置において、追従対象の移動可能な通路と通路上に配置される、第1計算地点及び第2計算地点を含む複数の計算地点とが記載された地図を記憶する第1の記憶部108と;追従対象の移動履歴を記憶する第2の記憶部111と;地図を参照して追従対象が通路上を第1計算地点から第2計算地点に移動する遷移確率を算出する算出部103と;センサが追従対象を検出できない場合に、移動履歴及び遷移確率に基づいて複数の計算地点における追従対象の存在可能性を予測する予測部105と;を具備する。
(もっと読む)
経路探索システム及び方法、搬送システム、並びにコンピュータプログラム
【課題】経路探索システムにおいて、取り扱うデータ数及び演算負荷を低減しつつ、最適経路を探索する。
【解決手段】経路探索システム(100)は、被搬送物を搬送するための搬送車(2)を該搬送車の経路上で出発地点から目標地点まで移動させる際の最適経路を探索する。経路探索システムは、複数の作業装置を含んで構成される集合を少なくとも一つ含む複数の集合の各々をノードとし且つ該複数の集合の相互間をリンクとして規定される、搬送車の移動コストを格納する格納手段(9)と、格納された移動コストに基づいて、最適経路の少なくとも一部を、複数の集合を結ぶ単位で探索する経路探索手段(6)と、探索された少なくとも一部と、複数の集合のうち前記探索された少なくとも一部に含まれる一又は複数の集合の内部に存在する前記経路の部分とを統合することで、最適経路を特定する経路特定手段(7)とを備える。
(もっと読む)
自律移動装置
【課題】特定の人のそばについて自律的に移動する自律移動装置において、特定の人の安全を確保するように移動することが可能な自律移動装置を提供する。
【解決手段】自律移動装置1は、主人のそばについて自律的に移動しつつ、カメラ10及び通信機12などが認識した周囲環境に物体が存在した場合に、主人に対する物体の危険度を危険度検出部24が検出し、この危険度に基づいてアクチュエータ制御部26及び電動モータ34が当該自律移動装置を移動させる。これにより、自律移動装置1は、主人のそばについて自律的に移動するとともに、主人に対する危険度を検出してこの危険度に基づいて移動するため、この危険度を考慮して主人の安全を確保する移動を行うことができる。
(もっと読む)
自走式機器およびそのプログラム
【課題】清掃後に機器本体のセンサのメンテナンスを自動的に行い、定期的なセンサのメンテナンスを不要とした自走式機器を提供することを目的とする。
【解決手段】機器本体100を移動させる移動手段102と、機器本体の走行をコントロールするコントロール手段101と、電力を供給する電池104と、機器本体の移動により走行する空間の清掃を行う清掃手段103と、清掃後にホームポジションへ移動した機器本体を自動的にメンテナンスする自動メンテナンス手段105を備えたものである。これによって、清掃後に機器本体100のセンサのメンテナンスをホームポジションにおいて自動的に行い、定期的なセンサのメンテナンスを不要としたものである。
(もっと読む)
1 - 20 / 142
[ Back to top ]