
Fターム[5H301GG11]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体上に設けられた検出手段 (3,259) | 移動体の移動距離検出手段 (483)
Fターム[5H301GG11]の下位に属するFターム
走行用車輪の回転数を利用したもの (333)
Fターム[5H301GG11]に分類される特許
1 - 20 / 150
サービス制御システム、サービスシステム
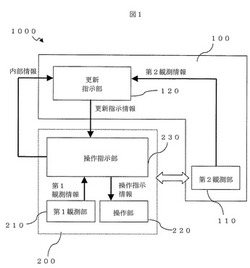
【課題】機械が実世界の状態に基づき実世界に対し有用な働きかけを行うサービスシステムにおいて、環境条件や目的等が変化したときでも、その働きかけがより適切なものとなるように変化させる。
【解決手段】本発明に係るサービス制御システムは、実世界インターフェースシステムが備える第1観測部とは異なる物理環境を観測する第2観測部を備え、実世界インターフェースシステムが第1観測部の観測結果に基づき動作した場合と第2観測部の観測結果に基づき動作した場合との間の差分が小さくなるように、実世界インターフェースシステムの動作を調整する。
(もっと読む)
重症心身障害者の自立的移動支援装置

【課題】床にテープやガイドライン等を配置する必要が無く、レイアウト変更に対応可能な、重症心身障害者の自立的移動支援装置を提供する。
【解決手段】重症心身障害者の自立的移動支援装置において、移動空間の天井10や壁面12に配設された、該移動空間や移動装置200の進行方向に関する情報を発信するためのマーカ100と、移動装置200に配設された、前記マーカ100からの信号を受信するための受信手段220、周囲の壁面12や障害物16までの距離と方位を検出するための測位手段240、移動先を重症心身障害者20が指定可能な入力手段280、前記測位手段240の測定結果や前記マーカ100からの信号に基づき移動方向を判断して、前記入力手段280で指定された移動先まで移動装置200を移動するよう制御するための制御手段320、及び、該制御手段320の出力により移動装置200を駆動する駆動手段340と、を備える。
(もっと読む)
移動体および移動体の制御方法
【課題】センサの傾きに因む計測誤りの影響を低減して、より正確な位置姿勢推定が行える、移動体および移動体の制御方法を提供する。
【解決手段】移動体の周囲の環境を計測し、そのセンサデータと予め保持する地図データとを比較することにより移動体の前記地図データ上での位置と姿勢を推定し、その推定結果に基づいて目的地に移動する移動体において、前記距離センサの距離データを環境の幾何形状データに変換する距離センサ制御部と、計測点のセンサからの距離に応じて、前記距離センサ制御部で得られた幾何形状データと地図データのマッチング対象のサイズを設定する距離センサ誤差低減部と、前記距離センサ誤差低減部で設定されたマッチング対象のサイズで幾何形状データと地図データをマッチング処理し移動体の位置と姿勢を推定する位置姿勢推定部を備えたことを特徴とする。
(もっと読む)
電動式ランナ
【課題】任意の機器が接続され、敷設されたダクト状のレールに沿って容易に位置を変更することができる電動式ランナを提供する。
【解決手段】電動式ランナ1は、レール2に走行自在に係合されると共に任意の機器9が接続されるランナ11と、ランナ11に設けられランナ11を自走させるアクチュエータ12とを備えている。ランナ11は、ダクト2に係合する係合部14と、機器9を接続するためのコネクタ15とを備えている。ランナ11は、電動式ランナ1にプラグ機能(挿入着脱機能)を付与する。アクチュエータ12として、衝撃力によってランナ11を自走させるインパクトアクチュエータを用いることができる。電動式ランナ1は、アクチュエータと共に自走するので、従来の配線ダクト用のプラグと異なり、移動のための着脱が不要であり、容易に位置を変更することができる。
(もっと読む)
位置姿勢出力装置、位置姿勢出力プログラム及び位置姿勢出力方法
【課題】移動体の正確な位置および姿勢を時間遅れなく出力する。
【解決手段】位置姿勢出力装置10は、移動体のオドメトリを計算する計算部3から、オドメトリを第1の間隔で取得する。オドメトリ及びオドメトリ以外の情報を用いて移動体の位置及び姿勢を推定する推定部5から、移動体の位置及び姿勢の推定結果を第1の間隔より長い第2の時間間隔で取得する。移動体の位置及び姿勢の推定結果が取得された場合に、更新後の移動体の位置及び姿勢の値が、オドメトリの差分に基づく位置及び姿勢と、移動体の位置及び姿勢の推定結果との間に遷移するように、記憶部13に記憶された移動体の位置及び姿勢を更新する。オドメトリが第1の間隔で取得される度に、当該オドメトリと今回の推定に用いられたオドメトリとの差分を記憶部13に記憶された移動体の位置及び姿勢に足し合わせた上で出力する。
(もっと読む)
移動体マップ装置、その処理方法及びプログラム
【課題】地図情報のメモリ容量を効率的に低減させつつ、地図情報の更新を適切に行うことができる移動体マップ装置、その処理方法及びプログラムを提供すること。
【解決手段】移動体マップ装置は、地図情報を記憶する第1記憶手段と、移動体の現在位置を検出する位置検出手段と、移動体の移動状態を検出する状態検出手段と、第1記憶手段の地図情報の中から、移動体の現在位置を含む所定領域を読出す読出手段と、第1記憶手段の地図情報から読み出された所定領域を、一時的に記憶する第2記憶手段と、位置検出手段により検出された移動体の現在位置と、状態検出手段により検出された移動体の移動状態と、に基づいて、移動体が所定領域内から外れるときの移動体の移動位置を予測する移動予測手段と、を備える。読出手段は、第1記憶手段の地図情報の中から、移動予測手段により予測された移動位置を含む所定領域を予め読出し、第2記憶手段に記憶させる。
(もっと読む)
モータ駆動装置
【課題】ガイドレールで規定される軌道上を走行する、複数の車輪を備えた走行台車において、従来は車載コントローラから直接個々の駆動車輪の制御を行っているが、この方式では駆動軸数が増えるほどコントローラの処理能力が必要となる。
【解決手段】モータ駆動装置の制御演算部101は、コントローラ部102とドライバ部103を備えている。コントローラ部102は、車載コントローラ401から出力された台車位置指令104を入力として、指令分周逓倍比105で車輪位置指令106に変換され、これとモータ位置119を入力とする位置制御器107で車輪速度指令108を生成する。これに速度指令出力ゲイン109を乗じた結果が、速度指令出力110としてコントローラ部102から出力される。
(もっと読む)
移動体
【課題】演算コストを低減して自己位置同定を行う。
【解決手段】移動体10は、自己位置同定手段120、周囲の環境を計測する環境計測手段110、障害物マップ生成手段130、目的地までの移動経路を生成する経路計画手段140、経路を走行するための制御信号を生成する追従制御手段150、制御信号に基づいて駆動する駆動手段160、及び移動体10の加速度を計測する加速度計測手段190を備える。自己位置同定手段120は、障害物マップに記録された障害物の位置を通過した場合と、加速度が閾値を超えた場合と、経路の曲率が閾値以上の箇所を通過した場合と、制御信号と駆動手段の駆動状態との比較によりスリップが生じていると判定した場合と、地図とのマッチングによる自己位置の同定から所定の時間が経過した場合または所定の距離だけ走行した場合と、のいずれかに該当した場合に、地図とのマッチングにより自己位置の同定を行う。
(もっと読む)
搬送車システム
【課題】搬送車システムにおいて、搬送車システムの搬送効率を向上させる。
【解決手段】搬送車システムは、複数の搬送車3と、複数の搬送車3と順番に通信を行う搬送車コントローラ47とを備えている。搬送車コントローラ47は、優先的に通信を行う優先通信搬送車3を記憶する優先通信搬送車記憶部59を有しており、複数の搬送車3の全てと順番に一度ずつ通信する間に、優先通信搬送車3と複数回通信する。
(もっと読む)
搬送車システム
【課題】搬送車の自動走行を継続させつつ、作業用エリアへの搬送車の侵入を防止することが可能な搬送車システムにおいて、作業用エリアでの安全性を向上させる。
【解決手段】搬送車システム1について説明する。搬送車3は、軌道2に沿って走行する。第2光電センサ48は、搬送車3に設けられている。通行禁止ゲート71は、軌道2に設置可能であり、第2光電センサ48によって検出可能なミラー87を有する。第1リミットスイッチ95は、軌道2に設けられ、通行禁止ゲート71が軌道2に設置されたことを検出する。コントローラ本体54は、第2光電センサ48からの検出結果によって通行禁止ゲート71が設置されたことを把握すれば、通行禁止ゲート71の片側を自動走行許可エリアに設定することを有効にする。
(もっと読む)
技術設備を遠隔操作式および/または自律式に検査するロボット用プラットフォーム
【課題】技術設備を遠隔操作式および/または自律式に検査するロボット用プラットフォームであって、少なくとも、駆動手段と、検査手段と、位置データを求めるための手段と、通信手段とを備えているものを改良して、公知の検査ユニットの欠点を解消して、様々な検査目的および検査場面に対する適合性を大幅に改善し、著しく簡素化されたトラブルのないデータ通信が得られるものを提供する。
【解決手段】ロボット用プラットフォーム10,20は、モジュール方式に形成されており、通信手段12,13,14は、統一規格に従って作動し、測定データおよび位置データは、ストリーミングにより、遅延時間がエラーのない評価にとって十分な程度に小さく、特に1msより小さくなるように迅速に評価ユニットに伝達される。
(もっと読む)
無人搬送車および走行制御方法
【課題】作業番地への停止において、精度の高いコンベアへの横付けが可能な無人搬送車および走行制御方法を提供することを目的とする。
【解決手段】コンベア12に設置されている反射板11へ光を照射し、反射板11から反射した信号光を受光することによって物体の存在を検出する光電センサを、無人搬送車1の側面前後にそれぞれ1つづつ備えるとともに、無人搬送車1とコンベア12とを検知する手段を備え、無人搬送車1の側面前後に備えられている光電センサの双方が反射板から反射した信号光を受光すると、操舵輪をコンベア12方向へ操舵し、無人搬送車1とコンベア12との距離が所定の距離となるまで無人搬送車1をコンベア12方向へ走行させることを特徴とする。
(もっと読む)
車両
【課題】少ない部品数で、台車の向きを保持したまま横方向に移動できる車両を提供する。
【解決手段】車両本体が台車と、台車に相対回転可能に連結された駆動ユニットと、駆動ユニットに配置され、独立駆動かつ正逆回転可能な一対の駆動輪と、駆動ユニット及び台車を相対回転不能に拘束可能な旋回ブレーキと、操舵角度を算出する操舵角度算出部とを備え、台車の向きを保って車両本体を横方向に移動させる際に、一方の駆動輪を正回転し、他方の駆動輪を逆回転させることで、操舵角度算出部で算出した操舵角度が予め設定した角度に至るまで、駆動ユニットを操舵及び旋回するとともに、操舵角度と等しい角度だけ、台車を逆方向に旋回させて、旋回ブレーキで拘束して車両本体を移動する。
(もっと読む)
車両の走行制御システム
【課題】走行車両を軌道に沿って走行させる走行制御システムを提供する。
【解決手段】走行車両200は、走行方向と直交する方向の両側において同軸上に配置された左右一対の車輪210、210を有し、これら車輪210、210にトルク指令を与えることで走行する。摩擦路面には、軌道Lから離れるに従って摩擦が小さくなるように摩擦係数の分布が設定されている。走行車両200は、左右の車輪210、210に対し同じトルク指令値を与えながら走行する。
(もっと読む)
自律移動体、速度設定装置および速度設定プログラム
【課題】
自律移動体の走行速度をスムーズに変化させることができる自律移動体、速度設定装置および速度設定プログラムを提供することを目的とする。
【解決手段】
自律移動体100は、移動環境内の所定範囲を計測する視覚センサ2と、視覚センサによる計測結果から所定範囲内の実際に計測された通路面積を算出する第1の通路面積算出部3と、移動体100の自己位置を推定する自己位置推定部4と、所定範囲に存在する固定された障害物の位置を示す参照マップと自己位置とから算出された通路面積を算出する第2の通路面積算出部5と、第1の通路面積算出部3と第2の通路面積算出部5とから算出された各通路面積の面積比を算出する面積比算出部6と、面積比から移動体100の速度を設定する速度設定部8と、を備える自律移動体である。これにより、急な速度変化を防止し、スムーズな減速が可能である。
(もっと読む)
位置検出装置、位置検出システム及び無線通信システム
【課題】移動体の現在位置を、複雑な計算を伴わずに正確に検出でき、位置検出のための情報を登録する必要のない位置検出装置、位置検出システム及び無線通信システムを提供する。
【解決手段】隣り合うものの共振周波数が異なるように移動体が移動する移動路に沿って等間隔に順に配置される複数種類の共振タグのそれぞれに専用のアンテナと、このアンテナの各々を介して共振タグを読み取る共振タグ読取部と、共振タグ読取部により読み取った共振タグの数に基づいて移動体の位置を検出する位置検出部と、を備える。
(もっと読む)
位置検出装置、位置検出システム及び無線通信システム
【課題】移動体の現在位置を、複雑な計算を伴わずに正確に検出でき、位置検出のための情報を登録する必要のない位置検出装置、位置検出システム及び無線通信システムを提供する。
【解決手段】移動体が移動する移動路に沿って等間隔に順に配置される共振タグに専用のアンテナと、このアンテナを介して共振タグを読み取る共振タグ読取部と、共振タグ読取部により読み取った共振タグの数に基づいて移動体の位置を検出する位置検出部と、を備える。
(もっと読む)
監視制御装置及び監視システム
【課題】人などの動的な遮蔽物により生じる死角の監視効率を向上することが可能である。
【解決手段】遮蔽物抽出手段46が、監視カメラ10A〜10Dから取得された映像から遮蔽物を抽出し、遮蔽物位置推定手段48が遮蔽物の位置を推定する。そして、死角算出手段50は、推定された遮蔽物の位置から監視カメラの死角の位置を算出し、その死角の位置に基づいて、ロボット目標位置姿勢決定手段54などが、移動ロボット20の位置姿勢を制御するので、死角の位置を的確に算出したうえで、移動ロボットを死角に向けて移動させたり姿勢を変更させたりすることができる。これにより、移動ロボットが撮影機能を有している場合には、死角の撮影を行うことができ、移動ロボットが人を移動させる機能を有している場合には、死角が長時間同一位置に留まらないように、人を移動させることができる。
(もっと読む)
サイドブラシ装置を備えた自走式清掃ロボット
【課題】サイドブラシが壁面等の障害物に接触してもサイドブラシ装置等の破損を招くことなく円滑な床面清掃が得られるサイドブラシ装置を備えた自走式清掃ロボットを提供する。
【解決手段】走行装置を備えたロボット本体2に設けられるサイドブラシ装置30L、30Rが、基端が揺動自在にロボット本体2の下面に支持されて前方に延在すると共に先端部にサイドブラシモータによって回転駆動されるサイドブラシ47L、47Rを支持するサイドブラシ支持装置31L、31Rを備え、サイドブラシ47L、47Rと同軸上の環状の回転バンパ62を設ける。清掃作業中に回転バンパ62が障害物に接触した際に、回転バンパ62が障害物に押圧付与されて回転バンパ62がサイドブラシ装置30L、30Rを障害物から離反する方向に誘導する。
(もっと読む)
乗用移動体の駆動制御装置及び駆動制御方法、乗用移動体
【課題】対象物に対する乗用移動体の走行を適切に支援する。
【解決手段】乗用移動体1は、姿勢のピッチ方向の角度を検出するジャイロセンサ21と、ジャイロセンサ21が検出したピッチ方向の検出角度に基づいた倒立振子制御により、各車輪3r,3lの駆動トルクを制御するCPU44と、周囲に存在する対象物と乗用移動体との距離を検出する対象物検知センサ32と、走行速度を検出するエンコーダ24r,24lと、を備え、CPU44が、対象物と乗用移動体との距離に応じた筐体のピッチ方向の角度補正成分を算出し、算出した角度補正成分をピッチ方向の検出角度に加算してピッチ方向の角度を補正し、補正したピッチ角度である加算値に基づいた倒立振子制御を行い、各車輪3r,3lの駆動トルクを制御する。
(もっと読む)
1 - 20 / 150
[ Back to top ]