
Fターム[5H301GG14]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体上に設けられた検出手段 (3,259) | 移動体の移動速度検出手段 (199)
Fターム[5H301GG14]に分類される特許
1 - 20 / 199
倒立型移動体、その制御方法、及びプログラム
【課題】小型の抵抗に維持しつつ回生電力を効果的に消費すること。
【解決手段】倒立型移動体は、姿勢情報を検出する姿勢検出手段と、車輪を駆動する駆動手段と、姿勢検出手段により検出された姿勢情報に基づいた値に第1制御ゲインを乗算して駆動手段を駆動するための第1制御信号を生成する第1制御手段と、姿勢検出手段により検出された姿勢情報に基づいた値に第2制御ゲインを乗算して駆動手段を駆動するための第2制御信号を生成する第2制御手段と、回生電圧が所定閾値以上であるか否かを判定する判定手段と、を備える。駆動手段は、第1制御手段から出力される第1制御信号と、第2制御手段から出力される第2制御信号と、に基づいて前記車輪を駆動する。第1及び第2制御手段は、判定手段により回生電圧が所定閾値以上であると判定されたとき、第1及び第2制御ゲインのうち一方の符号を反転させて、第1及び第2制御ゲインを変更する。
(もっと読む)
自動搬送システム

【課題】コストを抑制しつつ、走行経路の変更要求に柔軟に対応できる自動搬送システムを提供すること。
【解決手段】操舵可能な駆動輪を含む駆動ユニット、及び駆動ユニットを制御する制御ユニットを備えた自動搬送車2と、自動搬送車2の位置を検知する位置検知手段と、を備え、予定された経路に沿って自動搬送車2を移動させる自動搬送システム1では、自動搬送車2が移動するエリアとして、位置検知手段による検知位置を利用して自動搬送車2が制御される誘導走行エリア1A、及び自動搬送車2の位置が検知されないエリアであって検知位置を利用することなく自動搬送車2が制御される自律走行エリア1Bが設定されている。
(もっと読む)
走行装置
【課題】自律歩行が困難な歩行者を安全に先導することができる歩行支援装置を提供する。
【解決手段】移動方向を入力する操作入力部17を有するとともに、走行部を有して任意の方向に走行可能な自走体2と、前記操作入力部で入力された移動方向に基づいて前記自走体の走行を制御する走行制御手段51と、前記自走体の周囲の障害物の位置を検出する障害物検出手段52と、前記障害物検出手段で検出した障害物の位置情報と前記走行制御手段の指令値とに基づいて自走体の前記障害物への接触の有無を判定する障害物接触判定手段53と、該障害物接触判定手段の判定結果に基づいて前記走行制御手段の走行方向を補正する走行方向補正手段54とを備えている。
(もっと読む)
走行制御装置および車両
【課題】車両の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体の衝突回避を行うことができる走行制御装置および車両を提供すること。
【解決手段】車両1の進路方向における仮想バンパー領域71を広く設定する。これにより、車両1の進行先にある物体80との衝突回避を確実に行うことができる。一方、車両1の進行方向とは異なる方向においては、仮想バンパー領域71が車両1の進行方向と比して相対的に狭く設定されるので、車両1の進行方向とは関係のない場所にある物体との衝突回避動作を抑制できる。よって、車両1の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体80の衝突回避を行うことができる。
(もっと読む)
走行制御装置および車両
【課題】物体の衝突を回避しつつ、車両を物体に近づけることができる走行制御装置および車両を提供すること。
【解決手段】車両1の速度が大きいほど長い第1バンパー距離71を設定する。これにより、車両1が低速走行する場合には高速走行する場合に比較して、第1バンパーより71が短いので、物体80が近くまで迫った場合に第1反発力F1が仮想的に車両に加えられる。すなわち、車両1が低速走行する場合、車両1と物体とが遠い間は、第1反発力F1が車両1に加えられないか、若しくは、小さな第1反発力F1が車両1に加えられる。よって、車両1を物体80に近づけることができる。
(もっと読む)
飛行経路特定方法およびプログラム
【課題】複数の航空機が衝突を回避しつつ、迅速かつ効率的にそれぞれの目標位置に移動する。
【解決手段】飛行経路特定方法では、複数の航空機のうち任意の1の航空機が、他の航空機の目標位置と飛行経路とを受信し(S200)、他の航空機の目標位置を除く複数の目標位置から、到達までの時間が最短となる、または、到達に要するエネルギーが最小となる目標位置を選択し(S202)、自機の飛行状態に基づいて現地点から目標位置までの飛行経路を導出し(S204)、導出された飛行経路と他の航空機の飛行経路とを比較して、自機と他の航空機とが衝突するか否か判定し(S206)、衝突すると判定した場合、衝突しない飛行経路となるまで、飛行速度または飛行経路自体を変更する。
(もっと読む)
倒立型移動体、その制御方法及びプログラム
【課題】倒立型移動体の操作性を向上させること。
【解決手段】倒立型移動体1は、搭乗者の重心移動に応じて倒立状態を維持して走行する。倒立型移動体1は、搭乗者が把持し上下方向へ伸縮可能なハンドル2と、ハンドル2の伸縮動作をロック状態及びロック解除状態にする第1ロック手段と、倒立状態を維持しつつ所望の走行を行うように制御する通常制御モードと、倒立状態を維持しつつ目標位置に停まるように制御する位置制御モードと、を有する制御手段と、第1ロック手段のロック状態及びロック解除状態の切替えと、前記制御手段のモード切替えと、を連動して実行させる切替手段と、を備える。
(もっと読む)
搬送車、搬送車の制御方法及びプログラム
【課題】搬送サイクルタイムを短縮することができる搬送車、搬送車の制御方法及びプログラムを提供する。
【解決手段】搬送車は、第一誘導線に対応する方向と異なる方向に対応する第二誘導線を検出した場合、車体に配設された複数の駆動輪の駆動を停止する。搬送車は、複数の駆動輪を第一誘導線に対応する方向から第二誘導線に対応する方向に旋回する。搬送車は、第一誘導線に対する側方向の別と、走行方向前後の複数の位置における第一又は第二誘導線に対する車体の各位置偏差とに基づいて、駆動停止を継続する一つの駆動輪及び駆動を開始する他の駆動輪を決定する。
(もっと読む)
倒立型移動体制御装置、及びその制御方法
【課題】倒立型移動体の安全性を向上させる。
【解決手段】倒立型移動体の状態量を検出する状態検出手段123と、操作情報に応じた操作指令値を算出する指令入力手段122と、倒立型移動体の状態量に基づいて搭乗者の姿勢状態を推定する状態推定手段131と、倒立型移動体の状態量と駆動手段に対するトルク指令値とに基づき走行状態を判定する判定手段132と、推定された搭乗者の姿勢状態と判定された走行状態とに基づき走行状態毎に状態量、姿勢状態及びトルク指令値を調整する際の優先順位を設定し、優先順位に応じて制御パラメータの重みを算出する重み演算手段133と、判定された走行状態と算出された操作指令値とに基づいて判定された走行状態毎に検出される状態量の目標値となる指令値を算出する指令演算手段134と、算出された操作指令値と指令値と制御パラメータの重みとに基づいてトルク指令値を算出するトルク指令演算手段135とを備える。
(もっと読む)
無人搬送システム
【課題】マーカーを設けることなく無人搬送車の走行速度を制御することができる無人搬送システムを提供する。
【解決手段】路面に敷設された誘導ライン2Aと、該誘導ライン2Aに沿って所定の走行速度で走行する無人搬送車3とを備えた無人搬送システム1Aであって、誘導ライン2Aは、異なる色で着色された複数の着色領域2a、2bを有し、無人搬送車3は、誘導ライン2Aを含む領域の画像データを生成する撮像手段4a、4bと、生成された画像データにおける着色領域2a、2b間の境界線の数に基づいて目標速度を設定する目標速度設定部5と、目標速度に一致するように走行速度をフィードバック制御する走行制御部7と、境界線の数と走行速度との関係があらかじめ格納された記憶部6とを有することを特徴とする。
(もっと読む)
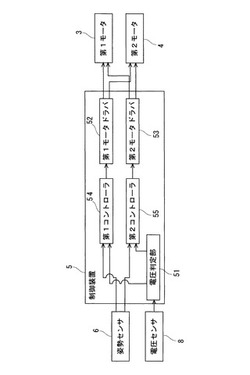
コークス消火電車の減速停止制御方法及び装置
【課題】消火電車の駆動輪のスリップによる消火電車の目標速度と実速度との間の速度偏差が大きくなっても、消火電車の自動運転のダウンタイムの発生を防止又は低減することができ、その結果、コークスの生産量を増加させることができるコークス消火電車の減速停止制御方法及び装置を提供する。
【解決手段】コークス消火電車を駆動する電動機をインバータによって制御して消火電車の自動走行速度制御を行う際に、消火電車を目標停止位置の手前に設けた減速開始点から減速させ、目標停止位置で停止させるコークス消火電車の減速停止制御方法であって、消火電車の減速時において、予め設定された目標速度と測定された実速度との速度偏差を監視し、この速度偏差が設定値を超えた場合には、消火電車のブレーキを動作させて強制的に消火電車を減速し、速度偏差が設定値以下に戻った場合には、消火電車のブレーキを開放し、インバータによる自動走行速度制御に戻すことにより、上記課題を解決する。
(もっと読む)
重心角推定方法及び同方法によって制御される倒立車輪型走行体
【課題】倒立車輪型走行体において、必要最小限のセンサを用いて、倒立状態及び補助輪接地状態の両状態における重心角(搭乗者や搭載物と倒立車輪型走行体との合成重心角)を推定する方法を提供する。
【解決手段】補助輪が接地せず駆動輪のみで倒立する倒立状態と補助輪が接地する補助輪接地状態とを有する搭乗可能な倒立車輪型走行体について、倒立状態及び補助輪接地状態の各運動方程式に基づいて状態オブザーバを設計し、補助輪接地状態の状態オブザーバの状態方程式にはアフィン項を導入し、倒立状態及び補助輪接地状態の各状態オブザーバを用いて、両状態での搭乗者又は搭載物に起因する倒立車輪型走行体全体の重心角の変動分及び外乱、及び補助輪接地状態での床反力を推定する。
(もっと読む)
ロボットの運動予測制御方法と装置
【課題】状態推定の計算量やデータ通信の所要時間の影響を受けることなく、ロボットごとに決められた制御周期で制御指令値を算出し、複数のロボットを制御することができるロボットの運動予測制御方法と装置を提供する。
【解決手段】(A)ロボット1の制御周期に依らない任意のタイミングで、計測装置12、状態推定装置14、及びデータ記憶装置16により、対象物やロボット1のセンサ情報を取得し、センサ情報と同時刻の各ロボット1の内部状態Xを予測し、センサ情報と比較して内部状態を更新し、更新した内部状態Xと予測に用いた状態遷移方程式f(X)を記憶し、(B)複数のロボット制御装置20により、データ記憶装置16に記憶された最新の内部状態Xに基づき、各ロボット1の制御周期で、各ロボット1に必要な予測値を予測し、複数のロボット1をリアルタイムに制御する。
(もっと読む)
経路探索機能付き移動体
【課題】地図データ上で自己位置と最終目標点が特定されたときに、自己位置から移動可能範囲内を伸びて最終目標点に至る大域経路を計算する技術が知られている。障害物を検出したときに、障害物を回避しながら最終目標点に至る経路を計算する技術も知られている。しかしながら両者を融合する技術が未解決であり、障害物を回避してから大域経路に復帰する経路がうまく計算できない。
【解決手段】障害物回避経路計算手段で用いる最終目標点に代えて中間目標点を用いる。障害物よりも遠方にある大域経路上の点を中間目標点とすると、障害物を回避してから大域経路に復帰する経路を計算できる。
(もっと読む)
自律走行装置及び自律走行方法並びにそのプログラム
【課題】分岐路のある道路でも白線などのガイド線を用いずに自律走行が可能となる自律走行装置を提供する。
【解決手段】周囲の検出範囲の接地面に仮想的に設けた点範囲それぞれの高さを検出し、近傍の点範囲との高さの差が路肩検出基準値以上となる場合の点範囲を、路肩点を示す点範囲と検出する。そして、検出範囲内における基準経路の左右両側それぞれにおいて検出した路肩点を左右両側ごとにそれぞれ結んだ左右両側それぞれの路肩線を特定し、当該左右両側それぞれの路肩線に基づいて道路形状を認識する。また、検出範囲内の左右の路肩線の間に仮想的に設けた複数の経路候補が示す点範囲を特定し、当該経路候補が示す各点範囲の高さと、当該経路候補が示す点範囲隣接する他の点範囲の高さとの変化量の小さい経路候補を走行経路と特定する。
(もっと読む)
無人搬送システム
【課題】マーカーを設けることなく無人搬送車の走行速度を制御することができる無人搬送システムを提供する。
【解決手段】路面に敷設された誘導ライン2と、該誘導ライン2に沿って所定の走行速度で走行する無人搬送車3とを備えた無人搬送システム1であって、誘導ライン2は、区間によって異なるライン幅を有し、無人搬送車3は、誘導ライン2を含む領域の画像データを生成する撮像手段4a、4bと、生成された画像データにおけるライン幅に基づいて目標速度を設定する目標速度設定部5と、目標速度に一致するように走行速度をフィードバック制御する走行制御部6と、を有することを特徴とする。
(もっと読む)
車両および車両制御プログラム
【課題】自車両の走行を自動で制御しつつ、搭乗者の意思に沿って走行経路を決定できる車両および車両制御プログラムを提供すること。
【解決手段】車両1が、予め設定された走行軌道に沿って自動走行を行っている場合に、搭乗者がジョイスティック13を傾斜操作すると、走行制御装置100は、その傾斜方向(操作角度δ)に基づいて進行すべき道路を選択し、その道路へ進入するための走行軌道を走行軌道メモリ93bに格納する。これにより、搭乗者の意思に基づいて指示された車両1の進行すべき方向に基づいて走行軌道が設定され、その走行軌道に沿って車両1の走行を制御できる。よって、自車両の走行を自動で制御しつつ、搭乗者の意思に沿って走行軌道を決定できる。
(もっと読む)
車両および車両制御プログラム
【課題】搭乗者の進行したい方向を正確に汲み取りながら走行予定軌道を選択して自動走行を行うことができる車両および車両制御プログラムを提供すること。
【解決手段】第3車両位置予測処理(S107)によって、ステアリングホイール13の回転角速度Δδを取得してステアリングホイール13の操舵角を算出し、そのステアリングホイール13の操舵角から前輪2FL,2FRへ付与される操舵角を算出して、その前輪2FL,2FRへ付与される操舵角と車両速度とに基づいて車両1のヨーレートを推定し、その推定したヨーレートから所定時間後の車両位置を予測する。これにより、搭乗者の進行したい方向を、所定時間後の車両位置まで特定して把握しているので、予測された車両位置に基づいて走行軌道を選択することによって、搭乗者の進行した方向を正確に汲み取りながら走行予定軌道を選択して、自動走行を行うことができる。
(もっと読む)
車両用情報処理装置
【課題】簡易な構成で現在位置よりも先の車両位置における車両の旋回曲率を推定する。また、望ましくは推定された旋回曲率を車両挙動の安定化に利用する。
【解決手段】車両(1)に搭載される車両用情報処理装置(100)は、操舵入力に対応する操舵入力情報、旋回状態を規定する車両状態量及び車速に基づいて、前記車両の将来位置を算出する将来位置算出手段と、前記算出された将来位置を少なくとも一つ含み、且つ前記車両の現在位置に対応する車両位置を含む、前記車両に係る三以上の車両位置に基づいて、前記現在位置よりも先の暫定走行位置における前記車両の旋回曲率を推定する推定手段とを具備する。
(もっと読む)
搬送車システム
【課題】左右の車輪を独立して駆動可能な搬送車において、曲線部走行時にモータの過負荷を防止する。
【解決手段】搬送車システムにおいて、速度パターン発生部62は、搬送車が曲線部を走行するときに2個の走行車輪に対して基準速度に対して内外輪にそれぞれ速度差が生じるように、速度指令を発生して2個のモータ26,29に与える。速度パターン発生部62は、搬送車が加速中に曲線部に進入することを光電センサ47が検出すれば、第1速度比率変化区間において、外輪となる走行車輪に対応するモータに対して進入時の加速度a01以下の加速度となるような速度指令を生成して与え、内輪となる走行車輪に対応するモータに対して外輪となる走行車輪の速度より速度差分以上を減らした速度となるような速度指令を生成して与える。
(もっと読む)
1 - 20 / 199
[ Back to top ]