
Fターム[5H301GG16]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体上に設けられた検出手段 (3,259) | 移動体の方位検出手段 (413)
Fターム[5H301GG16]の下位に属するFターム
ジャイロ (272)
Fターム[5H301GG16]に分類される特許
1 - 20 / 141
潜水ビークル
倒立型移動体、その制御方法、及びプログラム
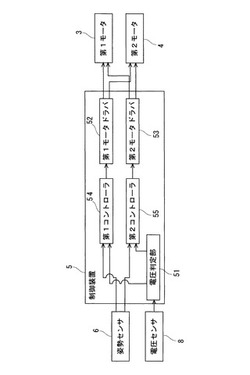
【課題】小型の抵抗に維持しつつ回生電力を効果的に消費すること。
【解決手段】倒立型移動体は、姿勢情報を検出する姿勢検出手段と、車輪を駆動する駆動手段と、姿勢検出手段により検出された姿勢情報に基づいた値に第1制御ゲインを乗算して駆動手段を駆動するための第1制御信号を生成する第1制御手段と、姿勢検出手段により検出された姿勢情報に基づいた値に第2制御ゲインを乗算して駆動手段を駆動するための第2制御信号を生成する第2制御手段と、回生電圧が所定閾値以上であるか否かを判定する判定手段と、を備える。駆動手段は、第1制御手段から出力される第1制御信号と、第2制御手段から出力される第2制御信号と、に基づいて前記車輪を駆動する。第1及び第2制御手段は、判定手段により回生電圧が所定閾値以上であると判定されたとき、第1及び第2制御ゲインのうち一方の符号を反転させて、第1及び第2制御ゲインを変更する。
(もっと読む)
遠隔操縦車両システム

【課題】通信データ量を軽減して、遠隔操作部での表示遅れを防止する。
【解決手段】遠隔操縦車両100では、点群高さデータaと位置情報Lを基に、三次元マップ生成部104が三次元マップデータcを順次生成して出力する。差分抽出演算部106は、最新の三次元マップデータcと、一つ前の三次元マップデータcとの差分演算をして差分三次元マップデータc1を出力する。差分三次元マップデータc1と位置情報Lは、送受信部107から無線送信され、遠隔操作部200の送受信部201で受信される。差分三次元マップデータc1は、三次元マップ再生部202で順次加算されて再生三次元マップデータc2となる。画面生成部205では、記憶装置203に記憶された再生三次元マップデータc2と、地図データベース204から取り出した地図画面データGとを合成して表示画像データdを生成する。モニタ206には表示画像データdが表示される。
(もっと読む)
自動搬送システム
【課題】コストを抑制しつつ、走行経路の変更要求に柔軟に対応できる自動搬送システムを提供すること。
【解決手段】操舵可能な駆動輪を含む駆動ユニット、及び駆動ユニットを制御する制御ユニットを備えた自動搬送車2と、自動搬送車2の位置を検知する位置検知手段と、を備え、予定された経路に沿って自動搬送車2を移動させる自動搬送システム1では、自動搬送車2が移動するエリアとして、位置検知手段による検知位置を利用して自動搬送車2が制御される誘導走行エリア1A、及び自動搬送車2の位置が検知されないエリアであって検知位置を利用することなく自動搬送車2が制御される自律走行エリア1Bが設定されている。
(もっと読む)
車輪型ロボット
【課題】基体の傾斜や転倒を抑制することが可能な、車輪型ロボットを提供する。
【解決手段】被案内者が把持する把持部を取り付けた基体の水平面に対する傾斜角度を検出する基体傾斜角検出部112と、基体と把持部への入力に応じて基体を移動させる移動部とを、基体傾斜角検出部112が検出した傾斜角度が減少するように、平面視で直交する二つの軸回り方向へ相対移動可能に連結するロールピッチ機構を駆動させるロールピッチ機構駆動部の駆動状態を制御するロールピッチ機構駆動制御部114と、把持部への入力に応じて基体を移動させる駆動輪が走行する走行路の路面と基体との距離である路車間距離が予め設定した許容距離を超えていると判定すると、駆動輪を駆動させる走行用モータの駆動状態を駆動輪が停止するように制御する走行用モータ駆動制御部110を備える。
(もっと読む)
重症心身障害者の自立的移動支援装置
【課題】床にテープやガイドライン等を配置する必要が無く、レイアウト変更に対応可能な、重症心身障害者の自立的移動支援装置を提供する。
【解決手段】重症心身障害者の自立的移動支援装置において、移動空間の天井10や壁面12に配設された、該移動空間や移動装置200の進行方向に関する情報を発信するためのマーカ100と、移動装置200に配設された、前記マーカ100からの信号を受信するための受信手段220、周囲の壁面12や障害物16までの距離と方位を検出するための測位手段240、移動先を重症心身障害者20が指定可能な入力手段280、前記測位手段240の測定結果や前記マーカ100からの信号に基づき移動方向を判断して、前記入力手段280で指定された移動先まで移動装置200を移動するよう制御するための制御手段320、及び、該制御手段320の出力により移動装置200を駆動する駆動手段340と、を備える。
(もっと読む)
情報取得装置、情報取得方法、情報取得プログラム、及び、情報取得システム
【課題】移動可能なノードが複数存在する空間において、位置認識の確実性を向上させる。
【解決手段】作業空間内の各ロボット100は、3つの他のロボット100からの光を受けて、当該他のロボット100の絶対位置の情報を取得することにより、自己の絶対位置を判別する。また、作業空間内の各ロボット100は、2つの他のロボット100からの光を受けて、当該他のロボット100の絶対位置の情報と、当該他のロボット100の位置から自ノードであるロボット100への絶対方位の情報とを取得することにより、自己の絶対位置を判別する。
(もっと読む)
物品処理設備
【課題】物品の搬送を停滞なく適切に行えるようにしながらも、装備する無人搬送車の台数を減少させて設備の設置コストの低下を図ることができる物品処理設備を提供する。
【解決手段】外部搬出入部Bに位置する物品Pを自動倉庫Aの物品入出庫部2に搬送する物品搬入処理、及び、自動倉庫Aの物品入出庫部2に位置する物品Pを外部搬出入部Bに搬送する物品搬出処理を行うべく、無人搬送車担当経路における自動倉庫側に位置する倉庫側物品移載部F及び外部搬出入部側に位置する外部側物品移載部Gとの間での搬送作業を無人搬送車10に割り付ける搬送管理手段が、割込み要求が指令されたときには、倉庫側物品移載部Fと外部側物品移載部Gとの間での搬送作業の一部の搬送作業を、作業者によって運転される有人搬送車Mに割り付けるように構成されている。
(もっと読む)
飛行経路特定方法およびプログラム
【課題】複数の航空機が衝突を回避しつつ、迅速かつ効率的にそれぞれの目標位置に移動する。
【解決手段】飛行経路特定方法では、複数の航空機のうち任意の1の航空機が、他の航空機の目標位置と飛行経路とを受信し(S200)、他の航空機の目標位置を除く複数の目標位置から、到達までの時間が最短となる、または、到達に要するエネルギーが最小となる目標位置を選択し(S202)、自機の飛行状態に基づいて現地点から目標位置までの飛行経路を導出し(S204)、導出された飛行経路と他の航空機の飛行経路とを比較して、自機と他の航空機とが衝突するか否か判定し(S206)、衝突すると判定した場合、衝突しない飛行経路となるまで、飛行速度または飛行経路自体を変更する。
(もっと読む)
搬送車、搬送車の制御方法及びプログラム
【課題】搬送サイクルタイムを短縮することができる搬送車、搬送車の制御方法及びプログラムを提供する。
【解決手段】搬送車は、第一誘導線に対応する方向と異なる方向に対応する第二誘導線を検出した場合、車体に配設された複数の駆動輪の駆動を停止する。搬送車は、複数の駆動輪を第一誘導線に対応する方向から第二誘導線に対応する方向に旋回する。搬送車は、第一誘導線に対する側方向の別と、走行方向前後の複数の位置における第一又は第二誘導線に対する車体の各位置偏差とに基づいて、駆動停止を継続する一つの駆動輪及び駆動を開始する他の駆動輪を決定する。
(もっと読む)
位置姿勢出力装置、位置姿勢出力プログラム及び位置姿勢出力方法
【課題】移動体の正確な位置および姿勢を時間遅れなく出力する。
【解決手段】位置姿勢出力装置10は、移動体のオドメトリを計算する計算部3から、オドメトリを第1の間隔で取得する。オドメトリ及びオドメトリ以外の情報を用いて移動体の位置及び姿勢を推定する推定部5から、移動体の位置及び姿勢の推定結果を第1の間隔より長い第2の時間間隔で取得する。移動体の位置及び姿勢の推定結果が取得された場合に、更新後の移動体の位置及び姿勢の値が、オドメトリの差分に基づく位置及び姿勢と、移動体の位置及び姿勢の推定結果との間に遷移するように、記憶部13に記憶された移動体の位置及び姿勢を更新する。オドメトリが第1の間隔で取得される度に、当該オドメトリと今回の推定に用いられたオドメトリとの差分を記憶部13に記憶された移動体の位置及び姿勢に足し合わせた上で出力する。
(もっと読む)
自律走行装置及び自律走行方法並びにそのプログラム
【課題】分岐路のある道路でも白線などのガイド線を用いずに自律走行が可能となる自律走行装置を提供する。
【解決手段】周囲の検出範囲の接地面に仮想的に設けた点範囲それぞれの高さを検出し、近傍の点範囲との高さの差が路肩検出基準値以上となる場合の点範囲を、路肩点を示す点範囲と検出する。そして、検出範囲内における基準経路の左右両側それぞれにおいて検出した路肩点を左右両側ごとにそれぞれ結んだ左右両側それぞれの路肩線を特定し、当該左右両側それぞれの路肩線に基づいて道路形状を認識する。また、検出範囲内の左右の路肩線の間に仮想的に設けた複数の経路候補が示す点範囲を特定し、当該経路候補が示す各点範囲の高さと、当該経路候補が示す点範囲隣接する他の点範囲の高さとの変化量の小さい経路候補を走行経路と特定する。
(もっと読む)
車両用情報処理装置
【課題】簡易な構成で現在位置よりも先の車両位置における車両の旋回曲率を推定する。また、望ましくは推定された旋回曲率を車両挙動の安定化に利用する。
【解決手段】車両(1)に搭載される車両用情報処理装置(100)は、操舵入力に対応する操舵入力情報、旋回状態を規定する車両状態量及び車速に基づいて、前記車両の将来位置を算出する将来位置算出手段と、前記算出された将来位置を少なくとも一つ含み、且つ前記車両の現在位置に対応する車両位置を含む、前記車両に係る三以上の車両位置に基づいて、前記現在位置よりも先の暫定走行位置における前記車両の旋回曲率を推定する推定手段とを具備する。
(もっと読む)
移動装置およびロボットならびにこれらの制御システム
【課題】制御対象の状況に鑑みて、時空間座標系における当該制御対象の目標軌道を適当な形態で探索することができるシステム等を提供する。
【解決手段】時空間座標系における第1基準点q1(k)および第2基準点q2(k)の初期位置関係(k=1)が、アクチュエータ2の動作性能に応じた「第1条件」を満足するように設定される。前回軌道候補tr(k−1)が物体軌道troに接触すると判定された場合、時空間座標系における第1基準点q1(k)および第2基準点q2(k)の今回位置関係(k>1)が第1基準点q1(k)および第2基準点q2(k)の今回時間間隔が前回時間間隔よりも長くなる等の「第2条件」を満足するように設定される。
(もっと読む)
自動搬送車の制御方法
【課題】自動搬送車を横行又は斜行させた後、新たな導線への追従状態に移行するための制御方法であって、新たな導線に円滑に乗り移ることで、追従状態への移行に要する時間を短縮可能な自動搬送車の制御方法を提供すること。
【解決手段】自動搬送車2が横行でガイドライン12へ接近して乗り移るための制御方法は、駆動ユニット3をガイドライン12に接近させる第1の走行ステップと、ラインセンサ351がガイドライン12を検出した後、再びガイドライン12を検出しなくなるまで駆動ユニット3をそのまま前進させる第2の走行ステップと、第2の走行ステップの後、ラインセンサ351によりガイドライン12を再検出できるように駆動ユニット3を操舵する第3の走行ステップと、ラインセンサ351によるガイドライン12の再検出に応じて追従走行制御への切換を実行する移行ステップと、を含んでいる。
(もっと読む)
自律走行作業車の制御装置
【課題】走行予定領域において予め定められた走行パターンに従って走行すると共に、角速度センサの出力を適正に較正するようにした自律走行作業車の制御装置を提供する。
【解決手段】作業車の重心位置の鉛直軸回りに生じる角速度を示す出力を生じるYawセンサと車輪速を示す出力を生じる車輪速センサの出力に基づいて算出される進行方位と走行距離に基づき、走行予定領域において予め定められた走行パターンに従い、作業車を直進走行させつつ、作業させる走行作業制御において、直進走行のとき、予め定められた走行パターンで予定される予定走行距離L1と実走行距離L2の差が誤差許容値αを超えるか否か判定し(S10からS18)、差が誤差許容値を超えると判断されるとき、Yawセンサの出力の中心値を補正する(S22)。
(もっと読む)
倒立型移動体、その制御方法及び制御プログラム
【課題】安定的に倒立状態を維持できる倒立型移動体、その制御方法及び制御プログラムを提供すること。
【解決手段】倒立型移動体1は、負荷体の傾斜角度である負荷角度を検出する負荷角度手段と、車輪を駆動する駆動手段と、負荷体の倒立状態を維持するように駆動手段の駆動を制御する制御手段と、制御手段が駆動手段に対して出力する制御信号と、負荷角度検出手段により検出された負荷角度とに基づいて、車輪と路面との間の滑り量を時間で微分した微分値を演算する滑り演算手段と、滑り演算手段により演算された微分値に基づいて、所定時間後において、負荷体の倒立状態の維持が不能となる負荷角度の限界値を演算する負荷角度演算手段と、を備えている。制御手段は、負荷角度演算手段により演算された負荷角度の限界値に基づいて、駆動手段の駆動を制御する。
(もっと読む)
遊泳型アクセス装置の姿勢安定化システム
【課題】バラストタンクのバラスト調整により遊泳型アクセス装置の上下移動だけでなく、姿勢を容易に制御することを可能にする。
【解決手段】完全に分離した複数のタンク22が集合してなるバラストタンク10と、 水中における遊泳型アクセス装置6の本体の傾斜の方向、傾斜量を計測する姿勢計測手段12と、バラストタンク10を構成するタンクのうち、任意のタンクへの注排水を実施する注排水手段と、姿勢計測手段による計測結果に基づいて、目標とする姿勢を保つのに必要な注排水を実施すべきバラストタンク10のタンク22の特定と必要とされる注排水量の演算を行い、その演算結果に従って前記注排水手段の動作を制御する制御手段14と、を設ける。
(もっと読む)
移動体位置検出システムおよび方法
【課題】ポールスターアルゴリズムを用いた際の照合不良を起こし難くして、検出の信頼性を確保した移動体位置検出システムおよび方法を提供する。
【解決手段】平面12上を移動する移動体16の位置を検出する移動体位置検出システム10であって、撮像手段20により取得した画像中のドットと、このドットに対応するポールスターデータベース34中のドットとの間の誤差を吸収するための尤度を設定したポールスター特徴量を用いてポールスター照合を行うポールスター照合手段24と、ポールスター照合手段24により照合された照合ドット候補から所定の照合ドットに絞り込む絞り込み手段26と、絞り込み手段26により絞り込んだ所定の照合ドットからなるドットパターンの位置関係に基づいて、移動体16の現在位置および方向を検出する検出手段28とを備えるようにする。
(もっと読む)
軌道追従制御装置、方法及びプログラム
【課題】制御対象物の状態変数の一階微分(例えば速度DX(t)/Dt)を計測及びフィードバックすることなく、スライディング制御を実現する。
【解決手段】スライディング制御の式の中で登場する定数λの値をfとする。また、定数λの値を、制御対象物の状態変数X(t)(例えば位置)、制御対象物の目標とする状態Xd(t)(例えば目標位置)を用いて制御対象物の目標とする状態の一階微分(例えば目標速度DXd(t)/Dt)に応じて適宜修正する。これにより、スライティング制御の式の中で登場する制御対象物の状態変数の一階微分(例えば速度DX(t)/Dt)の項を消すことができ、制御対象物の状態変数の一階微分(例えば速度DX(t)/Dt)を計測及びフィードバックすることなく、スライディング制御を実現することができる。
(もっと読む)
1 - 20 / 141
[ Back to top ]