
Fターム[5H301GG17]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体上に設けられた検出手段 (3,259) | 移動体の方位検出手段 (413) | ジャイロ (272)
Fターム[5H301GG17]に分類される特許
1 - 20 / 272
無人走行体を用いた環境情報の取得システム
【課題】粉塵、煙又は水蒸気が立ち込める劣悪な環境下においても構築物内の環境を正確に取得可能な環境情報の取得システムを提供する。
【解決手段】遠隔操縦装置を用いてオペレータにより遠隔操縦される無人走行体5に、走査式二次元測距装置105と、放射線検出器116を搭載する。また、安全な場所には、遠隔操縦装置を備えた制御装置本体を設置する。制御装置本体は、遠隔操縦装置の操作内容に応じた制御信号を出力して無人走行体5の走行制御を行いながら、走査式二次元測距装置105の検出データから生成される三次元画像と、放射線検出器116の検出データを合成し、制御装置本体に接続された表示装置に表示する。
(もっと読む)
無人走行体の遠隔操縦システム

【課題】2台の無人走行体を容易かつ安定に遠隔操縦することが可能な無人走行体の遠隔操縦システムを提供する。
【解決手段】第1の表示装置202を第2の表示装置302の左側に配列し、第1の表示装置202の駆動制御画面210中に表示される撮影カメラ85,86の撮影映像を、駆動制御画面210の右側辺に沿って設けられた表示部211に表示すると共に、第2の表示装置302の駆動制御画面310中に表示されるメインカメラ113の撮影映像を、駆動制御画面310の左側辺に沿って設けられた表示部311に表示する。
(もっと読む)
無人走行体の遠隔操縦システム
【課題】通常のカメラによっては鮮明な環境情報を取得することが困難な環境に無人走行体が投入された場合にも、無人走行体を正確、容易かつ高能率に遠隔操縦可能な遠隔操縦システムを提供する。
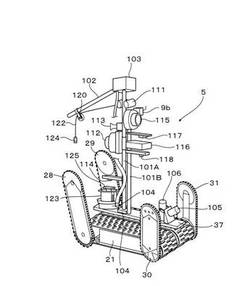
【解決手段】無線無人走行体5に、レーザ光走査式三次元測距装置106と、往路前方カメラ112と、メインカメラ113と、復路前方カメラ115と、俯瞰カメラ118とを搭載する。安全な場所に設置された表示装置に、レーザ光走査式三次元測距装置106により検出された三次元画像と、各カメラ112,113,118により撮影された映像を表示する。オペレータはこれらの三次元画像及びカメラ画像を参照しながら、無線無人走行体5の遠隔操縦を行う。
(もっと読む)
無人走行体の遠隔操縦システム
【課題】簡単かつ安価な構成で、無人走行体の活動範囲を延長可能な無人走行体の遠隔操縦システムを提供する。
【解決手段】LANケーブル1を介して接続された第1及び第2の操作卓2,3と、第1操作卓2から出力される制御信号により遠隔操縦される有線無人走行体4と、第2操作卓3から出力される制御信号により遠隔操縦される無線無人走行体5と、第2操作卓3と有線無人走行体4とを接続する通信ケーブル6,7と、通信ケーブル6と通信ケーブル7との間に配置された無線中継装置8と、有線無人走行体4と無線無人走行体5とを接続する無線通信装置9と、通信ケーブル6を巻回したケーブルリール10とをもって、無人走行体の遠隔操縦システムを構成する。
(もっと読む)
ロボット掃除機及びその制御方法
【課題】ロボット掃除機及びその制御方法を提供する。
【解決手段】ロボット掃除機の制御方法は、第1の掃除モードに従って、前記ロボット掃除機の位置を基準にして多数の掃除領域を定義すること;及び定義された前記掃除領域別に順次掃除を行うこと;を含む。本発明のロボット掃除機及びその制御方法によると、繰り返しモードが開始され、ロボット掃除機の位置を基準にして多数の掃除領域を定義し、掃除領域別に順次掃除を行うとき、基準壁面の検出可否によってロボット掃除機が属した掃除領域を再設定し、再設定された掃除領域内で走行経路に沿って移動しながら掃除を行うので、掃除が1回も行われていない領域や掃除の重複領域を減少させることができる。また、掃除が1回も行われていない領域や掃除の重複領域を減少させることによって、ロボット掃除機の掃除効率を向上させることができる。
(もっと読む)
姿勢角度演算装置、姿勢角度演算方法、及びプログラム
【課題】低コストかつ高精度に姿勢角度を算出すること。
【解決手段】姿勢角度演算装置は、角速度を検出するジャイロセンサ及び加速度を検出する加速度センサを備え、ジャイロセンサにより検出された角速度と、加速度センサにより検出された加速度と、に基づいて姿勢角度を算出している。ジャイロセンサ及び加速度センサのうち少なくとも一方は、同一箇所及び同一方向を計測する、計測域の異なる複数のセンサで構成されている。姿勢角度演算装置は、計測域の異なる複数のセンサから夫々出力される信号に基づいて、姿勢角度を算出する姿勢角演算手段と、を備えている。
(もっと読む)
移動体の自己位置判別装置
【課題】位置判別演算開始点における移動体の進行方向角度(方位)を実際に移動するエリヤに設定した角度(方位)に対して誤差が少なく簡単に合わせることのできる移動体の自己位置判別装置を得る。
【解決手段】移動体10の両側面に移動体10の進行方向に直角に光電センサ12、13を取り付け、光電センサ12、13の光を反射するための反射板14、15を、移動エリヤの倉庫入口1の両側に、光電センサ12、13の光軸と対向するように設置する。倉庫入口1を移動車10が通過するときの光電センサ12、13の動作時間差を利用して通過時の角度を算出する。
(もっと読む)
走行制御装置および車両
【課題】車両の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体の衝突回避を行うことができる走行制御装置および車両を提供すること。
【解決手段】車両1の進路方向における仮想バンパー領域71を広く設定する。これにより、車両1の進行先にある物体80との衝突回避を確実に行うことができる。一方、車両1の進行方向とは異なる方向においては、仮想バンパー領域71が車両1の進行方向と比して相対的に狭く設定されるので、車両1の進行方向とは関係のない場所にある物体との衝突回避動作を抑制できる。よって、車両1の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体80の衝突回避を行うことができる。
(もっと読む)
倒立型移動体、その制御方法及びプログラム
【課題】倒立型移動体の操作性を向上させること。
【解決手段】倒立型移動体1は、搭乗者の重心移動に応じて倒立状態を維持して走行する。倒立型移動体1は、搭乗者が把持し上下方向へ伸縮可能なハンドル2と、ハンドル2の伸縮動作をロック状態及びロック解除状態にする第1ロック手段と、倒立状態を維持しつつ所望の走行を行うように制御する通常制御モードと、倒立状態を維持しつつ目標位置に停まるように制御する位置制御モードと、を有する制御手段と、第1ロック手段のロック状態及びロック解除状態の切替えと、前記制御手段のモード切替えと、を連動して実行させる切替手段と、を備える。
(もっと読む)
自律移動体
【課題】自律移動体が移動する障害物を避けながら移動する際に、障害物に接近しすぎることがなく、障害物が移動する流れに沿って移動しながら目的地に到達する経路を探索する自律移動体を提供する。
【解決手段】自律移動体と移動障害物の間に仮想粘性力と仮想斥力が作用するとし、経路探索技術で用いる移動コストに仮想粘性力と仮想斥力を含める。また、分岐点を仮に選択して移動コストを計算する際には、その分岐点を通過する時点における移動障害物の位置と速度を予測して仮想粘性力と仮想斥力を計算する。移動障害物に接近しすぎると移動コストが増大し、移動障害物の流れに沿って移動すると移動コストが低下することから、移動障害物に接近しすぎることがなく、しかも移動障害物の流れに沿って移動する経路が探索される。
(もっと読む)
無人搬送車
【課題】SLAM技術を用いた無人搬送車であっても、古典的な誘導方法で走行する無人搬送車と同様に簡単な方法で走行制御の破綻を監視することができる無人搬送車を提供すること。
【解決手段】SLAM技術を用いて現在位置を求め、求められた現在位置を基に、予め設定されている経路データ123に沿って走行し、経路データ123と無人搬送車1の現在位置とのずれを補正するための旋回角θ及び無人搬送車1の進路方向が目標位置に向くための操舵角ρを無人搬送車1が経路データ123に沿って走行するように補正しながら制御する制御手段10と、制御手段10による補正量の変動を監視するとともに、補正量が外乱によって制御可能な範囲を逸脱したときに走行を停止する監視手段11とを備える。
(もっと読む)
環境地図を用いた掃除ロボット
【課題】簡単に操作でき、自動的に環境内を掃除する掃除ロボットを提供する。
【解決手段】本発明は、コンピュータ18により駆動制御する走行制御部34と、車輪センサ36と、環境との接触を検出する接触センサ38を有し、環境を掃除する掃除ロボットにおいて、環境地図を保存する環境地図記憶部25と、オドメトリ情報から得られるロボット座標を保存するロボット座標記憶部21と、多数のパーティクルの座標を保存するパーティクル座標記憶部22と、前記環境地図とパーティクル軌道を保存するパーティクル掃引地図記憶部23と、前記多数のパーティクルの尤度を演算して最適軌道を導出する最適軌道導出手段と、前記最適軌道を前記掃除ロボットの軌道として保存するロボット掃引地図記憶部23と、小尤度のパーティクルを消去するリサンプリング手段と、前記掃除ロボット及び前記パーティクルを回転反射させる反射手段を有する掃除ロボットである。
(もっと読む)
倒立型移動体制御装置、及びその制御方法
【課題】倒立型移動体の安全性を向上させる。
【解決手段】倒立型移動体の状態量を検出する状態検出手段123と、操作情報に応じた操作指令値を算出する指令入力手段122と、倒立型移動体の状態量に基づいて搭乗者の姿勢状態を推定する状態推定手段131と、倒立型移動体の状態量と駆動手段に対するトルク指令値とに基づき走行状態を判定する判定手段132と、推定された搭乗者の姿勢状態と判定された走行状態とに基づき走行状態毎に状態量、姿勢状態及びトルク指令値を調整する際の優先順位を設定し、優先順位に応じて制御パラメータの重みを算出する重み演算手段133と、判定された走行状態と算出された操作指令値とに基づいて判定された走行状態毎に検出される状態量の目標値となる指令値を算出する指令演算手段134と、算出された操作指令値と指令値と制御パラメータの重みとに基づいてトルク指令値を算出するトルク指令演算手段135とを備える。
(もっと読む)
自律移動装置
【課題】広範囲の地図情報を有し、且つ建物の窪みや行き止まりなどに進入しても脱出可能であり、目的地までの到達を保証する自律移動装置を提供する。
【解決手段】従来の自律移動装置は現時点で観測している障害物マップのみに基づいて局所経路を探索するため、建物の窪みや行き止まりなどに進入した場合、自律移動装置は次の経由点を探索できず、停止してしまう。そこで、障害物マップを保存・累積する機能を設け、累積した障害物マップから局所マップを作成する。こうすることで、前記障害物に進入した場合でも、過去の障害物マップを累積した局所マップを参照することで次の経由点に至る局所経路が探索され、前記障害物から脱出できる。局所マップは次の分岐点に到達するまで消去されないため、確実に次の分岐点に到達でき、結果として目的地までの到達が保証される。
(もっと読む)
リモートコントロール方法及びリモートコントロールシステム
【課題】コスト高を招くことなく、目視できない状況下でも、移動体を直感的に操縦できるリモートコントロール方法及びリモートコントロールシステムを提供する。
【解決手段】移動体20、は、常に操縦者HMの視線方向(基準方向)と平行に、その前方を向けており、よって例えば視線方向に対して右に角度δの方向に進行したい場合、それに応じた操舵量だけ進行方向を操作する操縦装置のスティックを視線方向に対して右に角度δの方向に倒せばよい。
(もっと読む)
ロボット掃除機及びその制御方法
【課題】停止せずに走行方向を変更するために停止せずに掃除領域を掃除するのにかかる時間を減少させることができる、ロボット掃除機及びその制御方法に関する。
【解決手段】ロボット掃除機は、掃除領域を走行しながら確保した位置データに基づいて、掃除を行う区域を設定し、前記掃除を行う区域を掃除できるように掃除経路を予め設定し、前記掃除経路にジグザグ走行経路が含まれると、ジグザグ走行経路に沿って移動中に、曲線走行して方向を転換することによって、走行方向の転換時に、掃除領域を掃除するのにかかる時間を減少させることができる。
(もっと読む)
重心角推定方法及び同方法によって制御される倒立車輪型走行体
【課題】倒立車輪型走行体において、必要最小限のセンサを用いて、倒立状態及び補助輪接地状態の両状態における重心角(搭乗者や搭載物と倒立車輪型走行体との合成重心角)を推定する方法を提供する。
【解決手段】補助輪が接地せず駆動輪のみで倒立する倒立状態と補助輪が接地する補助輪接地状態とを有する搭乗可能な倒立車輪型走行体について、倒立状態及び補助輪接地状態の各運動方程式に基づいて状態オブザーバを設計し、補助輪接地状態の状態オブザーバの状態方程式にはアフィン項を導入し、倒立状態及び補助輪接地状態の各状態オブザーバを用いて、両状態での搭乗者又は搭載物に起因する倒立車輪型走行体全体の重心角の変動分及び外乱、及び補助輪接地状態での床反力を推定する。
(もっと読む)
地図処理方法及びプログラム、並びにロボットシステム
【課題】地図処理方法及びプログラム、並びにロボットシステムにおいて、複数の推定器が推定した位置姿勢を高精度に統合することを目的とする。
【解決手段】互いに異なるセンサからの入力に基づいて自己位置を推定する複数の推定器の信頼度をこれらの推定器に対応する信頼性評価モデルを用いて評価する評価処理と、これらの複数の推定器からの推定結果に対して信頼性に応じた異なる統合処理を行う結合処理をコンピュータに実行させるように構成する。
(もっと読む)
歩行ロボット装置及びその制御プログラム
【課題】環境地図の作成と自己位置推定を、求められる精度を確保しつつ、安価に実現することのできる歩行ロボット装置及びその制御プログラムを提供する。
【解決手段】環境地図を作成する機能は、2ヶ所において撮影した地図作成用環境画像から撮影対象物を示す代表点を抽出し、代表点の位置と撮影した位置座標とから撮影対象物の位置座標を求め、撮影した地図作成用環境画像、代表点の位置及び前記撮影対象物の位置座標とを関連付けた環境地図を作成する。自己位置を推定する機能は、任意の位置座標において撮影した位置推定用環境画像中の撮影対象物の代表点に、対応する地図作成用環境画像中の撮影対象物の位置座標を対応させ、交会法によって前記歩行ロボット装置の自己位置を算出する。
(もっと読む)
車両および車両制御プログラム
【課題】自車両の走行を自動で制御しつつ、搭乗者の意思に沿って走行経路を決定できる車両および車両制御プログラムを提供すること。
【解決手段】車両1が、予め設定された走行軌道に沿って自動走行を行っている場合に、搭乗者がジョイスティック13を傾斜操作すると、走行制御装置100は、その傾斜方向(操作角度δ)に基づいて進行すべき道路を選択し、その道路へ進入するための走行軌道を走行軌道メモリ93bに格納する。これにより、搭乗者の意思に基づいて指示された車両1の進行すべき方向に基づいて走行軌道が設定され、その走行軌道に沿って車両1の走行を制御できる。よって、自車両の走行を自動で制御しつつ、搭乗者の意思に沿って走行軌道を決定できる。
(もっと読む)
1 - 20 / 272
[ Back to top ]