
Fターム[5H301HH03]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体の操舵態様 (687) | 偏位量、偏位角に対する演算処理の限定 (35)
Fターム[5H301HH03]の下位に属するFターム
連続的操舵量を得るもの (27)
不連続的操舵量を得るもの (1)
リミッタ特性を有するもの (1)
不感帯特性を有するもの
Fターム[5H301HH03]に分類される特許
1 - 6 / 6
移動体及び移動体の走行方法

【課題】 制御性が良い走行軌道をオンボードで生成することによって、移動体の制御がスムーズになり高精度の走行を可能とすると共に、あらかじめ地図や軌道作成などの付帯作業の必要がなく、安価で応用性が高い移動体を提供する。
【解決手段】 移動した移動軌跡を記憶する記憶手段と、前記記憶手段に記憶された移動軌跡を編集して自走行軌道を生成する走行軌道生成手段と、前記走行軌道生成手段により生成された自走行軌道に基づいて走行する走行手段と、前記走行手段により実際に走行した軌道である自走行軌跡と、前記走行軌道生成手段により生成された自走行軌道とに基づいて、前記自走行軌跡と前記自走行軌道との誤差が少なくなるように、前記走行手段に補正値を与える走行誤差補正手段とを備える。
(もっと読む)
自立走行車両システム及び無線タグの配置構造

【課題】配置されている無線タグの配置を工夫することで、無線タグに記録されている情報を管理することなく少ない情報で自立走行車両の自立走行を実現する自立走行車両システム及び無線タグの配置構造を提供する。
【解決手段】7種類に識別されている情報のうち何れか1つが記録されている無線タグ11を等間隔に規則正しく並べる。そして、無線タグリーダ13が複数取り付けられた自立走行車両12で、無線タグ11の情報を読み取り予め設定されている情報に基づいて進行方向の推測と微調整とを実現する。
(もっと読む)
移動装置
【課題】移動装置において、移動障害物が存在する環境下においても高速な移動を可能とすること。
【解決手段】移動装置は、外界情報取得手段31、障害物検出手段32、障害物特徴推定手段33、衝突予測手段34、回避経路計画手段35、回避軌道生成手段36を備える。衝突予測手段34は、障害物の位置および特徴と移動装置の姿勢情報および軌道情報とから当該障害物との衝突予測をする。回避経路計画手段35は、衝突が予測された場合、障害物を回避するための障害物の左右もしくは障害物の周囲を通過する経由点を算出し、経由点を通る1つまたは複数の回避経路を計画する。回避軌道生成手段36は、障害物と干渉することのないように経由点を調整し、かつ移動装置が走行可能な滑らかな回避軌道を生成する。
(もっと読む)
自走式ロボット
【課題】 自走式ロボットの周囲の障害物を正確に検出する。
【解決手段】 進行方向V1に対して、超音波発信器s2を中心として、等間隔に、3台の超音波発信器と4台の超音波受信器とが交互に配設されている。ここでは、進行方向V1に向かって左側から、超音波受信器r1、超音波発信器s1、超音波受信器r2、超音波発信器s2、超音波受信器r3、超音波発信器s3、超音波受信器r4の順に配設されている。また、本体部10の中心点Oを通り、進行方向V1に平行な直線である中心線LSについて、3台の超音波発信器と4台の超音波受信器とが線対称な位置に配設されている。
(もっと読む)
無人搬送車
【課題】 複雑な制御を要することなく、予め路面に設定された走行ラインに沿って追従性良く走行することのできる無人搬送車を提供する。
【解決手段】 車両本体の横方向偏差yeとヨー角偏差φeとに基づいて求められる走行ライン上での移動速度VLから前後方向偏差xeを求め、これらの偏差に従って車両本体に対する進行速度指令値ur、旋回速度指令値γr、および横行速度指令値νrを求める。そしてこれらの指令値と、推定横行速度および推定旋回速度とに従って追従制御に必要な横行速度と旋回速度とをそれぞれ得る操舵角δy,δpを求めて、前輪および後輪の各操舵角δf,δrを決定する。
(もっと読む)
ピッチ変調による車両制御
下地表面上の特定方向への運動に対する車両の前後安定化のための方法。車両は、少なくとも1つの前輪と少なくとも1つの後輪とを有し、前輪は車両の運動の瞬間的な方向に垂直である力により特徴付けられる。モーター作動器は、各々の後輪を駆動し、コントローラは、一律の制御規則に従い、該前輪が該下地表面と接触していても、そうでなくても、該車両を動的に安定化させるように、1つ以上のモーター作動器を支配する。トルクは、車両ピッチまたは運動方向に垂直な前輪にかかる力を基礎として、後輪に適用される。さらに、周期的な回転変調は、後輪に適用され得、車両ピッチまたは前輪にかかる垂直な力のどちらかについて検出された応答に基づいて安定しているトルクが提供される。左右のモーター作動器は、別個に左後輪および右後輪を制御し得、前輪がグランドに接触していても、そうでなくても、ユーザーの操縦により支配される通りにターンを続ける。 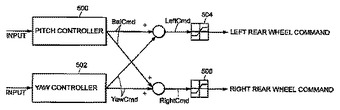 (もっと読む)
(もっと読む)
1 - 6 / 6
[ Back to top ]