
Fターム[5H301HH10]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体の操舵態様 (687) | 駆動輪の回転差を用いた操舵 (225)
Fターム[5H301HH10]に分類される特許
1 - 20 / 225
無人走行体の遠隔操縦システム
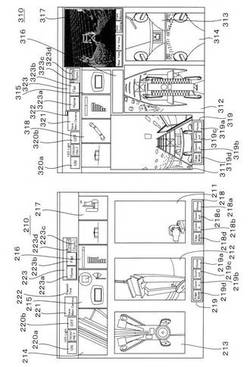
【課題】2台の無人走行体を容易かつ安定に遠隔操縦することが可能な無人走行体の遠隔操縦システムを提供する。
【解決手段】第1の表示装置202を第2の表示装置302の左側に配列し、第1の表示装置202の駆動制御画面210中に表示される撮影カメラ85,86の撮影映像を、駆動制御画面210の右側辺に沿って設けられた表示部211に表示すると共に、第2の表示装置302の駆動制御画面310中に表示されるメインカメラ113の撮影映像を、駆動制御画面310の左側辺に沿って設けられた表示部311に表示する。
(もっと読む)
無人走行体を用いた環境情報の取得システム

【課題】粉塵、煙又は水蒸気が立ち込める劣悪な環境下においても鮮明な環境情報を取得可能な無人走行体を用いた環境情報の取得システムを提供する。
【解決手段】遠隔操縦装置305を用いてオペレータにより遠隔操縦される無人走行体5に、走査式二次元測距装置105と、前方監視用の光学カメラ(メインカメラ)113を搭載する。また、安全な場所には、遠隔操縦装置305を備えた制御装置本体301を設置する。制御装置本体301は、遠隔操縦装置305の操作内容に応じた制御信号を出力して無人走行体5の走行制御を行いながら、走査式二次元測距装置105の検出データを1走査毎に、制御装置本体301に接続されたUSBメモリ306に記憶する。また、光学カメラ113の撮影映像もUSBメモリ306に記憶する。
(もっと読む)
無人走行体の遠隔操縦システム
【課題】通常のカメラによっては鮮明な環境情報を取得することが困難な環境に無人走行体が投入された場合にも、無人走行体を正確、容易かつ高能率に遠隔操縦可能な遠隔操縦システムを提供する。
【解決手段】無線無人走行体5に、レーザ光走査式三次元測距装置106と、往路前方カメラ112と、メインカメラ113と、復路前方カメラ115と、俯瞰カメラ118とを搭載する。安全な場所に設置された表示装置に、レーザ光走査式三次元測距装置106により検出された三次元画像と、各カメラ112,113,118により撮影された映像を表示する。オペレータはこれらの三次元画像及びカメラ画像を参照しながら、無線無人走行体5の遠隔操縦を行う。
(もっと読む)
無人走行体の遠隔操縦システム
【課題】簡単かつ安価な構成で、無人走行体の活動範囲を延長可能な無人走行体の遠隔操縦システムを提供する。
【解決手段】LANケーブル1を介して接続された第1及び第2の操作卓2,3と、第1操作卓2から出力される制御信号により遠隔操縦される有線無人走行体4と、第2操作卓3から出力される制御信号により遠隔操縦される無線無人走行体5と、第2操作卓3と有線無人走行体4とを接続する通信ケーブル6,7と、通信ケーブル6と通信ケーブル7との間に配置された無線中継装置8と、有線無人走行体4と無線無人走行体5とを接続する無線通信装置9と、通信ケーブル6を巻回したケーブルリール10とをもって、無人走行体の遠隔操縦システムを構成する。
(もっと読む)
ロボット掃除機及びその制御方法
【課題】ロボット掃除機及びその制御方法を提供する。
【解決手段】ロボット掃除機の制御方法は、第1の掃除モードに従って、前記ロボット掃除機の位置を基準にして多数の掃除領域を定義すること;及び定義された前記掃除領域別に順次掃除を行うこと;を含む。本発明のロボット掃除機及びその制御方法によると、繰り返しモードが開始され、ロボット掃除機の位置を基準にして多数の掃除領域を定義し、掃除領域別に順次掃除を行うとき、基準壁面の検出可否によってロボット掃除機が属した掃除領域を再設定し、再設定された掃除領域内で走行経路に沿って移動しながら掃除を行うので、掃除が1回も行われていない領域や掃除の重複領域を減少させることができる。また、掃除が1回も行われていない領域や掃除の重複領域を減少させることによって、ロボット掃除機の掃除効率を向上させることができる。
(もっと読む)
走行ロボット
【課題】巻取装置を使用して急傾斜の階段でも安定した昇降が可能であり、且つ階段の踊り場のような狭い場所でも旋回が可能な走行ロボットを提供する。
【解決手段】階段200を上昇又は下降するときに、ワイヤ7若しくはケーブル70の一端を階段200の上方部に固定し、車体1が階段200を降下するときはワイヤ7若しくはケーブル70を送り出し、車体1が階段200を上昇するときはワイヤ7若しくはケーブル70を巻取るように巻取装置5を制御し、且つ、角度検出器9が検出した車体1の角度に基づいて巻取りの停止及び巻取りの開始を制御するようにした。
(もっと読む)
ロボット操作入力用グリップ及びそれを備えた案内用ロボット
【課題】被案内者が手首を捻らずに把持して入力操作を行うことが可能なロボット操作入力用グリップと、そのロボット操作入力用グリップを備える案内用ロボットを提供する。
【解決手段】基体2の上面に取り付けられ、且つ被案内者によるロボット操作入力用グリップ26への入力操作を検出する入力操作検出部と、入力操作検出部が検出した入力操作に応じて基体2を移動させるための駆動力を発生する移動用アクチュエータを備えた案内用ロボット1であって、ロボット操作入力用グリップ26が備えるグリップ本体部30は、入力操作検出部よりも上方に配置されており、グリップ本体部30が備える十個所のグリップ側凹部32は、グリップ本体部30を回転軸の方向から見て、少なくとも案内用ロボット1の前進方向を含む方向へ放射状に伸びている。
(もっと読む)
走行装置
【課題】自律歩行が困難な歩行者を安全に先導することができる歩行支援装置を提供する。
【解決手段】移動方向を入力する操作入力部17を有するとともに、走行部を有して任意の方向に走行可能な自走体2と、前記操作入力部で入力された移動方向に基づいて前記自走体の走行を制御する走行制御手段51と、前記自走体の周囲の障害物の位置を検出する障害物検出手段52と、前記障害物検出手段で検出した障害物の位置情報と前記走行制御手段の指令値とに基づいて自走体の前記障害物への接触の有無を判定する障害物接触判定手段53と、該障害物接触判定手段の判定結果に基づいて前記走行制御手段の走行方向を補正する走行方向補正手段54とを備えている。
(もっと読む)
ロボット掃除機及びその制御方法
【課題】補助掃除ユニットの誤作動を検出し、該検出結果に基づいてロボット掃除機の走行を制御し、補助掃除ユニットに誤作動が発生した場合にも隅部分を効率的に掃除できるロボット掃除機及びその制御方法を提供する。
【解決手段】このロボット掃除機は、前記ロボット掃除機の下部に突出及び収納可能に装着される補助掃除ユニット100と、前記補助掃除ユニットの突出、収納または回転状態を感知する感知部300と、前記感知部の感知結果に基づいて前記補助掃除ユニットが正常に動作するか否かを判断し、前記判断結果に基づいて前記ロボット掃除機の走行を制御する制御部200と、を備える。
(もっと読む)
移動ロボット
【課題】距離計測部を用いて高精度に位置決めを行う。
【解決手段】周辺物体までの距離と方向を計測する距離計測部3と、前記距離計測部が計測した周辺物体までの距離と方向を用いて目標物体の停止地点に対する当該移動ロボットの相対位置と相対方向を検出する相対姿勢検出部4と、前記相対位置と前記相対方向を用いて、前記移動機能部を制御する制御部5と、を備え、前記相対姿勢検出部は、前記目標物体を特定する線分を求めることにより、前記相対位置と前記相対方向を検出する。
(もっと読む)
搬送車、搬送車の制御方法及びプログラム
【課題】搬送サイクルタイムを短縮することができる搬送車、搬送車の制御方法及びプログラムを提供する。
【解決手段】搬送車は、第一誘導線に対応する方向と異なる方向に対応する第二誘導線を検出した場合、車体に配設された複数の駆動輪の駆動を停止する。搬送車は、複数の駆動輪を第一誘導線に対応する方向から第二誘導線に対応する方向に旋回する。搬送車は、第一誘導線に対する側方向の別と、走行方向前後の複数の位置における第一又は第二誘導線に対する車体の各位置偏差とに基づいて、駆動停止を継続する一つの駆動輪及び駆動を開始する他の駆動輪を決定する。
(もっと読む)
移動体の走行制御装置、走行制御方法、走行制御プログラム
【課題】移動体が外部環境との衝突を回避しながら走行するのに必要となる計算コストを抑制する技術を提供する。
【解決手段】自立走行ロボット1の走行を制御する走行制御部6は、進行方向側に存在する外部環境と、基準点Aと、の間の距離を計測して複数の距離データを生成する距離データ生成部60と、複数の距離データのうち、基準点Aから見て進行方向右側に分類されるものであって、最も小さい距離データを右側最短距離データDminRとして抽出し、複数の距離データのうち、基準点Aから見て進行方向左側に分類されるものであって、最も小さい距離データを左側最短距離データDminLとして抽出する、最短距離抽出部61と、自立走行ロボット1が外部環境との衝突を回避するのに必要となる旋回角θRAを決定する旋回角決定部62と、を備える。
(もっと読む)
倒立型移動体、その制御方法及びプログラム
【課題】倒立型移動体の操作性を向上させること。
【解決手段】倒立型移動体1は、搭乗者の重心移動に応じて倒立状態を維持して走行する。倒立型移動体1は、搭乗者が把持し上下方向へ伸縮可能なハンドル2と、ハンドル2の伸縮動作をロック状態及びロック解除状態にする第1ロック手段と、倒立状態を維持しつつ所望の走行を行うように制御する通常制御モードと、倒立状態を維持しつつ目標位置に停まるように制御する位置制御モードと、を有する制御手段と、第1ロック手段のロック状態及びロック解除状態の切替えと、前記制御手段のモード切替えと、を連動して実行させる切替手段と、を備える。
(もっと読む)
環境地図を用いた掃除ロボット
【課題】簡単に操作でき、自動的に環境内を掃除する掃除ロボットを提供する。
【解決手段】本発明は、コンピュータ18により駆動制御する走行制御部34と、車輪センサ36と、環境との接触を検出する接触センサ38を有し、環境を掃除する掃除ロボットにおいて、環境地図を保存する環境地図記憶部25と、オドメトリ情報から得られるロボット座標を保存するロボット座標記憶部21と、多数のパーティクルの座標を保存するパーティクル座標記憶部22と、前記環境地図とパーティクル軌道を保存するパーティクル掃引地図記憶部23と、前記多数のパーティクルの尤度を演算して最適軌道を導出する最適軌道導出手段と、前記最適軌道を前記掃除ロボットの軌道として保存するロボット掃引地図記憶部23と、小尤度のパーティクルを消去するリサンプリング手段と、前記掃除ロボット及び前記パーティクルを回転反射させる反射手段を有する掃除ロボットである。
(もっと読む)
自動搬送車及びそれを用いた自動搬送車システム
【課題】自動搬送車や移動ロボットを用いる搬送システムにおける搬送の効率を向上するために、システム中の自動搬送車や移動ロボットに被搬送物として台車を連結し、牽引させた場合、自動搬送車ないし移動ロボットの本体と台車が接触するなどの干渉をおこし、従来よりも搬送の効率を低下させる場合がある、という問題がある。本発明では、上記の問題を解決することを課題とする。
【解決手段】上記課題を解決するために、本発明の自動搬送車100は、自機を移動させる移動機構101と、台車200と連結および切り離しができる連結機構106と、台車200が連結されているか否かを検出する連結検出センサ107と、自機の周囲の情報を取得する外界センサ104と、上記移動機構101の制御を行う制御装置105と、を備え、台車200が連結されている場合には、台車200が連結されていない場合と異なる走行経路を走行することを特徴としている。
(もっと読む)
倒立型移動体制御装置、及びその制御方法
【課題】倒立型移動体の安全性を向上させる。
【解決手段】倒立型移動体の状態量を検出する状態検出手段123と、操作情報に応じた操作指令値を算出する指令入力手段122と、倒立型移動体の状態量に基づいて搭乗者の姿勢状態を推定する状態推定手段131と、倒立型移動体の状態量と駆動手段に対するトルク指令値とに基づき走行状態を判定する判定手段132と、推定された搭乗者の姿勢状態と判定された走行状態とに基づき走行状態毎に状態量、姿勢状態及びトルク指令値を調整する際の優先順位を設定し、優先順位に応じて制御パラメータの重みを算出する重み演算手段133と、判定された走行状態と算出された操作指令値とに基づいて判定された走行状態毎に検出される状態量の目標値となる指令値を算出する指令演算手段134と、算出された操作指令値と指令値と制御パラメータの重みとに基づいてトルク指令値を算出するトルク指令演算手段135とを備える。
(もっと読む)
移動ロボット及び移動ロボットの制御方法
【課題】制御コストの低減を図ったうえで、所定の移動経路に沿って確実に往復移動し得る移動ロボット及び移動ロボットの制御方法を提供する。
【解決手段】移動ロボット本体2と、移動ロボット本体2を全方向に移動させると共に超信地旋回させる駆動機構4と、移動ロボット本体2の前部及び後部にそれぞれ配置されて、移動面に設定された移動経路Rを検出する前部センサ部5F及び後部センサ部5Rと、往路移動時において、前部センサ部5Fの3個のセンサ5Fl,5Fc,5Frと移動経路Rとの位置関係に応じて駆動機構4を制御することで、移動ロボット本体2を移動経路Rにトレースさせ、復路移動時において、後部センサ部5Rの3個のセンサ5Rl,5Rc,5Rrと移動経路Rとの位置関係に応じて駆動機構4を制御することで、移動ロボット本体2を移動経路Rにトレースさせる制御部10を有している。
(もっと読む)
重心角推定方法及び同方法によって制御される倒立車輪型走行体
【課題】倒立車輪型走行体において、必要最小限のセンサを用いて、倒立状態及び補助輪接地状態の両状態における重心角(搭乗者や搭載物と倒立車輪型走行体との合成重心角)を推定する方法を提供する。
【解決手段】補助輪が接地せず駆動輪のみで倒立する倒立状態と補助輪が接地する補助輪接地状態とを有する搭乗可能な倒立車輪型走行体について、倒立状態及び補助輪接地状態の各運動方程式に基づいて状態オブザーバを設計し、補助輪接地状態の状態オブザーバの状態方程式にはアフィン項を導入し、倒立状態及び補助輪接地状態の各状態オブザーバを用いて、両状態での搭乗者又は搭載物に起因する倒立車輪型走行体全体の重心角の変動分及び外乱、及び補助輪接地状態での床反力を推定する。
(もっと読む)
車両および車両制御プログラム
【課題】自車両の走行を自動で制御しつつ、搭乗者の意思に沿って走行経路を決定できる車両および車両制御プログラムを提供すること。
【解決手段】車両1が、予め設定された走行軌道に沿って自動走行を行っている場合に、搭乗者がジョイスティック13を傾斜操作すると、走行制御装置100は、その傾斜方向(操作角度δ)に基づいて進行すべき道路を選択し、その道路へ進入するための走行軌道を走行軌道メモリ93bに格納する。これにより、搭乗者の意思に基づいて指示された車両1の進行すべき方向に基づいて走行軌道が設定され、その走行軌道に沿って車両1の走行を制御できる。よって、自車両の走行を自動で制御しつつ、搭乗者の意思に沿って走行軌道を決定できる。
(もっと読む)
自律移動装置及び自律移動制御方法
【課題】 目標物の捕捉が中断された場合であっても、確実に特定の目標物の追従を再開することができるようにする。
【解決手段】 移動する目標物に追従して自律的に移動する自律移動装置において、第1の認証情報を入力する第1の入力手段と、第1の認証情報を記録する認証情報記録手段と、目標物を捕捉する捕捉手段と、捕捉された目標物に追従するように走行させ、捕捉手段による目標物の捕捉が不能となった場合に停止させる走行制御手段と、目標物の捕捉が不能となった場合に、第2の認証情報を入力する第2の入力手段と、第2の認証情報と認証情報記録手段により記録された第1の認証情報とが一致するかを照合する照合手段とを具備し、走行制御手段は、照合手段により第2の認証情報と第1の認証情報とが一致すると照合された場合に、再度、捕捉手段により捕捉された目標物に追従するように走行させる。
(もっと読む)
1 - 20 / 225
[ Back to top ]