
Fターム[5H301JJ02]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体の速度制御、起動・停止時の制御 (362) | 加減速制御を行うもの (340) | 連続的な加減速パターンを有するもの (18)
Fターム[5H301JJ02]に分類される特許
1 - 18 / 18
コークス消火電車の減速停止制御方法及び装置
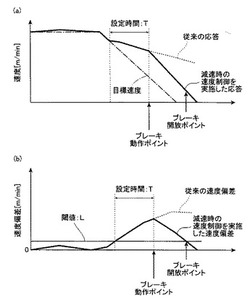
【課題】消火電車の駆動輪のスリップによる消火電車の目標速度と実速度との間の速度偏差が大きくなっても、消火電車の自動運転のダウンタイムの発生を防止又は低減することができ、その結果、コークスの生産量を増加させることができるコークス消火電車の減速停止制御方法及び装置を提供する。
【解決手段】コークス消火電車を駆動する電動機をインバータによって制御して消火電車の自動走行速度制御を行う際に、消火電車を目標停止位置の手前に設けた減速開始点から減速させ、目標停止位置で停止させるコークス消火電車の減速停止制御方法であって、消火電車の減速時において、予め設定された目標速度と測定された実速度との速度偏差を監視し、この速度偏差が設定値を超えた場合には、消火電車のブレーキを動作させて強制的に消火電車を減速し、速度偏差が設定値以下に戻った場合には、消火電車のブレーキを開放し、インバータによる自動走行速度制御に戻すことにより、上記課題を解決する。
(もっと読む)
電波計測システム

【課題】屋内エリアの地図データを作成し、作成した地図データに基づいて管理者により指定された経路を自律的に移動しながら電波環境データを測定する。
【解決手段】周囲の壁面までの距離を方位毎に測距する測距センサ207と、屋内エリア内に設置されたアクセスポイントからの電波の受信電力を予め定めた一定の時間間隔で測定する受信電力測定部203と、受信電力測定部203で測定された受信電力データの大きさを判定する受信電力判定部215と、測距センサ207により測距された測距データから屋内エリアの地図データを作成する地図データ作成部217と、サーバから与えられる走行データにより指定される走行経路に沿って自律的に自ロボットを走行させる走行手段208、209と、受信電力判定部215の判定結果に基づいて走行手段を構成するモータ209の回転速度を制御して自ロボットの移動速度を制御するモータ回転制御部216とを備える。
(もっと読む)
搬送車
【課題】左右の車輪を独立して駆動可能な搬送車において、簡単な構成及び制御による位置決めフィードバックを可能にする。
【解決手段】搬送車3において、第1走行車輪25及び第2走行車輪28は、搬送車本体15の左右に設けられている。第1モータ26及び第2モータ29は、第1走行車輪25及び第2走行車輪28にそれぞれ接続され、さらに、第1モータ制御部63及び第2モータ制御部64にそれぞれ接続されている。速度パターン発生部62は、第1モータ制御部63が第1モータ26を位置決め制御するときに、第1モータ制御部63が生成した速度指令を受信し、次に当該速度指令を第2モータ制御部64に送信する。第2モータ制御部64は、第1モータ制御部63が生成した速度指令を第2モータ29に与える。
(もっと読む)
自律移動ロボットシステム
【課題】自律移動ロボットの操作を通じて、高い移動速度や複雑な移動経路であっても、
それらに適応させた移動を次第に行うことができるようにする。
【解決手段】
自律移動ロボットBの移動態様を指示するための指示情報を生成する指示情報生成手段
65cと、生成した指示情報を自律移動ロボットBに向けて送信するための指示情報送信
手段を遠隔操作装置Cに設ける一方、遠隔操作装置Cからの指示情報の入力頻度を算出す
る指示情報入力頻度算出手段70bと、算出した指示情報の入力頻度に基づき、自律移動
ロボットBの自律移動に関わる自律移動用パラメータを変更する自律移動用パラメータ変
更手段70cと、変更した自律移動用パラメータに基づき、駆動機構によって自律移動ロ
ボットBを移動させる自律移動手段10mとを自律移動ロボットBに設けている。
(もっと読む)
自律移動体、速度設定装置および速度設定プログラム
【課題】
自律移動体の走行速度をスムーズに変化させることができる自律移動体、速度設定装置および速度設定プログラムを提供することを目的とする。
【解決手段】
自律移動体100は、移動環境内の所定範囲を計測する視覚センサ2と、視覚センサによる計測結果から所定範囲内の実際に計測された通路面積を算出する第1の通路面積算出部3と、移動体100の自己位置を推定する自己位置推定部4と、所定範囲に存在する固定された障害物の位置を示す参照マップと自己位置とから算出された通路面積を算出する第2の通路面積算出部5と、第1の通路面積算出部3と第2の通路面積算出部5とから算出された各通路面積の面積比を算出する面積比算出部6と、面積比から移動体100の速度を設定する速度設定部8と、を備える自律移動体である。これにより、急な速度変化を防止し、スムーズな減速が可能である。
(もっと読む)
コークス炉用移動機械の走行制御方法
【課題】コークス炉用移動機械の減速時にスリップが生じてもコークス炉用移動機械が目標停止位置から大きくずれた位置で停止したり、あるいはコークス炉用移動機械が制限速度を超えた速度で速度制限域に進入したりすることなくコークス炉用移動機械の走行を制御することのできるコークス炉用移動機械の走行制御方法を提供する。
【解決手段】コークス消火車などのコークス炉用移動機械の減速時にコークス炉用移動機械の実走行速度VCと目標走行速度VOとの速度偏差ΔVを予め定めた閾値Xと比較し、速度偏差ΔVが閾値Xを超えたときにコークス炉用移動機械の機械的ブレーキ装置を作動させるブレーキ作動信号を送出してコークス炉用移動機械の走行を制御する。
(もっと読む)
移動ロボット
【課題】移動ロボットが段差を乗り越えた後の経路との偏差を設定値以内に抑える。
【解決手段】本発明による移動ロボットは地図入出力部より高さ情報を備えた地図情報を取得し、移動ロボットシステム内に記録されている機構情報を用いて、実際に移動した際にどの程度移動ロボットが経路から外れるかを予測し、その予測が移動ロボットと経路との偏差がどの値まで抑えられるべきかをあらわす許容偏差値を超える場合は、移動速度を抑えるか、経路を段差に対して正対するように修正するかによって移動ロボットと経路との予測される偏差が許容偏差内に収まる経路を生成する。
(もっと読む)
搬送車
【課題】左右の車輪に別個にモータが設けられて独立して車輪を駆動可能な搬送車において、走行挙動の安定化を実現する。
【解決手段】搬送車3は、搬送車本体15と、左右の第1駆動輪25および第2駆動輪28と、第1モータ26および第2モータ29と、第1モータ制御部63と、第2モータ制御部64とを備えている。第1駆動輪25および第2駆動輪28は、搬送車本体15に設けられている。第1モータ26および第2モータ29は、第1駆動輪25および第2駆動輪28にそれぞれ接続されている。第1モータ制御部63は、第1モータ26をPID制御する。第2モータ制御部64は、第2モータ29を制御するのに、PID制御と微分要素を含まないフィードバック制御とを切換可能である。
(もっと読む)
移動体及び移動体の制御方法
【課題】本発明の目的は、走行速度の制御規則を柔軟に変更することが可能な移動体及び移動体の制御方法を提供することである。
【解決手段】移動体の制御方法は、移動体(1)を走行させるべき経路RXを評価した重み値W1(WX)から関数を用いて指令速度VCを計算するステップ(S2)と、前記移動体が前記経路RXを走行するときの走行速度を前記指令速度VCに制御するステップ(S3)とを具備する。前記関数は、所定の下限値WLL、所定の上限値WUL及び所定の指数nvをパラメータとして含む。下限値WLL、上限値WUL又は指数nvを変更することで、走行速度の制御規則を柔軟に変更することが可能である。
(もっと読む)
電磁誘導式自動走行車の停止制御方式
【課題】 停止エリア外では高速での走行が可能であり、停止エリア内では、停止位置の精度に優れた電磁誘導式自動走行車の停止制御方式を提供する。
【解決手段】 電磁誘導式自動走行車が停止エリアに入ったことが検出された場合には、駆動モータ4の回生制動と、ドラムブレーキ10a〜dとを用いて減速し、その後に停止信号が検出された場合には、あらかじめ設定されている走行距離を走行した後に、電磁クラッチブレーキ15を用いて停止をする。そして、あらかじめ設定されている走行距離と、実際の走行距離とを比較し、その差が設定範囲を超えているような場合には、前記電磁クラッチブレーキを解除し、前進又は後退の微調整走行をした後に、再び前記電磁クラッチブレーキを用いて停止をする。
(もっと読む)
車両交通システム及び車両用走行制御装置
【課題】本発明は、閉塞区間毎に敷設される通信装置の敷設範囲を小さくすることができる車両交通システムの提供と当該車両交通システムに適した車両用走行制御装置の提供を目的とする。
【解決手段】自動運転が可能な車両群Xが複数の閉塞区間に分割された走行路を走行する車両交通システムにおいて、車両群Xを停止させる停止信号を送信する通信コイル1及び車両群Xを進行させる進行信号を送信する通信コイル2が閉塞区間毎に敷設され、通信コイル1は通信コイル2の車両群Xの進行方向の手前に所定間隔空けて敷設されており、通信コイル1からの停止信号を受信した車両群Xが通信コイル2からの進行信号を受信可能な範囲に停止するように車両群Xの走行を制御することを特徴とする手段。
(もっと読む)
搬送車の停止位置制御方法
【課題】簡単な制御で長期間にわたって性能を維持することができる搬送車の停止位置制御方法を提供すること。
【解決手段】搬送車の実際の減速開始位置を所定の減速開始位置から前後に離れた位置でそれぞれ減速を行い、この減速開始位置を前後したことにより得られる位置決め評価の観測値と、所定の減速開始位置での減速により得られる位置決め評価の観測値とから最適な減速開始位置を計算し、この計算値に基づいて減速開始位置を補正する。
(もっと読む)
搬送装置の位置決め方法およびそれを適用した搬送装置
【課題】インバータを使用した搬送装置において、センサで停止を検知してから減速開始するまでの遅れ時間での減速分を補正し、停止位置のばらつきを減少させる。
【解決手段】搬送装置の位置決め方法において、センサーの停止指令を入力信号処理クロックでスキャンして停止検出信号を求め、前記停止検出信号を前記減速処理クロックでスキャンして減速開始信号を求め、前記停止検出信号から前記減速開始信号までの遅れ時間t1に相当する減速幅を演算し、次の減速処理クロック周期間には初期設定減速幅と前記減速幅を加算した減速幅で減速し、以降の減速処理クロック周期間には初期設定減速幅で減速する。
(もっと読む)
パターンの実機への実装方法
【課題】位置または速度または加速度の時間変化を示す点列データを、そのまま、自走車両のメモリに記憶させると、メモリを圧迫し大容量化を迫ることになってしまう。
【解決手段】スタッカークレーン1に備えるモータに指令値として与える加速度の時間変化を示す点列データの描くパターン(図2(c))を、スタッカークレーン1の実機に実装する際に、点列データの近似式となる曲線関数を、時刻を独立変数とし、加速度を従属変数とする、項数を有限としたフーリエ級数の形で導出し、この有限項数のフーリエ級数を特定するデータを、スタッカークレーン1に搭載するメモリ5に記憶させる。
(もっと読む)
走行台車システム
【構成】 目標停止位置の手前側に第1のマーク20を設け、マーク20と目標停止位置の間に第2のマーク22を設ける。走行台車8のマークセンサ24で第1のマーク20を検出すると速度パターン生成部26で残走行距離に対する速度パターンを生成し、第2のマーク22を検出すると速度パターン生成部26で速度パターンを再生成して、目標停止位置に停止する。
【効果】 クリープ走行無しで正確に走行台車が目標停止位置に停止できる。
(もっと読む)
走行体の停止位置制御方法
【課題】高速かつ正確に停止位置決めができるとともに、マーカー検出装置の設置コストを安くでき、かつ走行体の停止位置の調整を簡易に行えるようにした走行体の停止位置制御方法を提供すること。
【解決手段】軌道2側の走行体1を停止させる複数の目的位置にマーカー検出装置3A、3B、3C、3Dを、走行体1側に軌道側のマーカー検出装置3A、3B、3C、3Dを検知して位置を検出する位置検出装置を、それぞれ配設し、走行区間を走行しながらマーカー検出装置3A、3B、3C、3Dにて走行体1の位置を補正するようサーボモータに対し位置制御をして定位置にて停止するように制御する。
(もっと読む)
有軌道台車システム
【課題】優れた作業効率を有しながら所望の停止位置に正確に台車を停止させることができる有軌道台車システムを提供することを課題とする。
【解決手段】まず、学習運転時に、台車を高速度Vaで走行させ、ドグセンサが減速用ドグを検知してONする走行位置P1に到達すると台車を低速度Vbに減速し、その状態で光電センサが移載装置を検知してONする走行位置P2から光電センサがOFFする走行位置P3までの台車の走行距離Dをエンコーダで測定し、その半分の値D/2を基準走行距離としてメモリに記憶する。通常運転時には、走行位置P2まで学習運転時と同様に台車を走行し、走行位置P2で光電センサにより移載装置が検知されると、エンコーダによりそこからの台車の走行距離の測定を開始し、測定された走行距離がメモリに記憶された基準走行距離D/2に一致したところで台車の走行を停止する。
(もっと読む)
移動体の停止制御装置
【課題】 制動を開始してから停止するまでの間に生じる振動による目標停止位置に対する誤差を低減し、停止精度を向上する。
【解決手段】 移動体1が停止する目標停止位置を算出する(S102)。目標停止位置に対して、移動体1が制動を開始してから停止するまでの間における変位履歴に基づいて設定されたブレーキ補正値を考慮した手前位置から制動が開始されるように、制動開始位置(S104)を算出する。算出された制動開始位置に基づいて、制動指令(S107)が発せられる。ブレーキ補正値は、変位履歴中における減衰振動の振幅の略中心位置と制動を開始した位置との間の距離に基づいて設定される(S204〜S210)。これにより、機械的なガタ等による振動の影響が考慮され、停止制度を向上させることができる。
(もっと読む)
1 - 18 / 18
[ Back to top ]