
Fターム[5H301KK19]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 集中監視制御 (930) | 制御信号、検出信号の伝送手段の限定 (229) | 移動体と直接送受信するもの (118)
Fターム[5H301KK19]に分類される特許
1 - 20 / 118
自動搬送システム
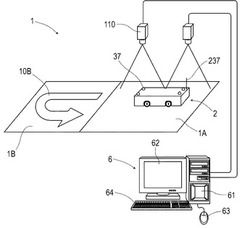
【課題】コストを抑制しつつ、走行経路の変更要求に柔軟に対応できる自動搬送システムを提供すること。
【解決手段】操舵可能な駆動輪を含む駆動ユニット、及び駆動ユニットを制御する制御ユニットを備えた自動搬送車2と、自動搬送車2の位置を検知する位置検知手段と、を備え、予定された経路に沿って自動搬送車2を移動させる自動搬送システム1では、自動搬送車2が移動するエリアとして、位置検知手段による検知位置を利用して自動搬送車2が制御される誘導走行エリア1A、及び自動搬送車2の位置が検知されないエリアであって検知位置を利用することなく自動搬送車2が制御される自律走行エリア1Bが設定されている。
(もっと読む)
リモートコントロール方法及びリモートコントロールシステム

【課題】コスト高を招くことなく、目視できない状況下でも、移動体を直感的に操縦できるリモートコントロール方法及びリモートコントロールシステムを提供する。
【解決手段】移動体20、は、常に操縦者HMの視線方向(基準方向)と平行に、その前方を向けており、よって例えば視線方向に対して右に角度δの方向に進行したい場合、それに応じた操舵量だけ進行方向を操作する操縦装置のスティックを視線方向に対して右に角度δの方向に倒せばよい。
(もっと読む)
搬送車システム、速度決定方法
【課題】環状の軌道上を一方通行で走行する搬送車を備える搬送車システムにおいて実荷状態で走行する搬送車の状況を把握し、搬送車システムの搬送効率を向上させる。
【解決手段】環状の軌道101と、搬送車102と、ステーション103とを備え、さらに、荷物を搬送する計画を示す情報である搬送計画を取得する搬送計画取得部104と、ステーション103、および、セグメントのレイアウト情報であるマップを取得するマップ取得部105と、搬送計画とマップとからセグメント毎に荷物を積載した状態で搬送車が通過する回数である実荷通過度数を算出する度数算出部106と、周回方向において実荷通過度数が連続的に増加するセグメントの区間である増加区間を特定する増加区間特定部107と、増加区間の実荷通過度数の低いセグメントにおける搬送車102の速度を低下させる制御部108とを備える。
(もっと読む)
搬送車システム
【課題】各搬送車に対する搬送要求の割り当てを効率よく行うことのできる搬送車システムを提供すること。
【解決手段】複数のステーション120に沿って設けられた一方通行の経路105と、複数の台車140と、コントローラ110とを備える搬送車システムであって、コントローラ110は、数の搬送要求を複数の台車140に通知する要求通知部112を有し、複数の台車140のそれぞれは、複数の搬送要求を受信する要求取得部142と、先行搬送車から、複数の搬送要求のうちの、先行搬送車が実行を予定する搬送要求を示す先行車情報を受信する受信部144と、先行車情報を参照することで特定される、複数の搬送要求のうちの当該搬送車が実行可能な1以上の搬送要求の中から、当該搬送車が実行する搬送要求である実行要求を決定する決定部146と、実行要求を示す情報を、後続搬送車に送信する送信部148とを有する。
(もっと読む)
搬送システム
【課題】搬送車両の充電作業が搬送作業に与える影響を従来よりも低減すると共にバッテリの大型化を抑制する。
【解決手段】蓄電池によって駆動され、電力を外部から受電及び外部に給電する複数の搬送車両3と、搬送車両3が走行する複数の走行軌道1A,1Bと、ある走行軌道1Aと他の走行軌道1Bとが隣接するエリアであって、ある走行軌道1Aを走行する搬送車両3と他の走行軌道1Bを走行する搬送車両3とが給電/受電する受給電エリアKa,Kbとを具備する。
(もっと読む)
操舵制御装置
【課題】搬送車両に多数の車軸が設けられている場合でも、その搬送車両を走行経路に沿って円滑に走行させることができる操舵制御装置を提供すること。
【解決手段】本実施形態では、各走行装置5a〜5lの車軸6aに対して操舵角θ1〜θ12を設定する場合に、操舵角設定テーブル72cから、各操舵角θ1〜θ12を取得している。よって、計算式により各操舵角θ1〜θ12を算出する場合よりも、演算量を少なくできるので、CPU71の演算時間も短くできる。従って、本実施形態のように、走行装置5a〜5lの数が多い場合でも、CPU71に掛かる負担が大きくならず、演算時間も長くならない。故に、各操舵角θ1〜θ12の設定を短い周期で実行することができ、走行経路R上に沿って無人搬送車両1を円滑に走行させることができる。
(もっと読む)
電波計測システム
【課題】屋内エリアの地図データを作成し、作成した地図データに基づいて管理者により指定された経路を自律的に移動しながら電波環境データを測定する。
【解決手段】周囲の壁面までの距離を方位毎に測距する測距センサ207と、屋内エリア内に設置されたアクセスポイントからの電波の受信電力を予め定めた一定の時間間隔で測定する受信電力測定部203と、受信電力測定部203で測定された受信電力データの大きさを判定する受信電力判定部215と、測距センサ207により測距された測距データから屋内エリアの地図データを作成する地図データ作成部217と、サーバから与えられる走行データにより指定される走行経路に沿って自律的に自ロボットを走行させる走行手段208、209と、受信電力判定部215の判定結果に基づいて走行手段を構成するモータ209の回転速度を制御して自ロボットの移動速度を制御するモータ回転制御部216とを備える。
(もっと読む)
搬送用走行体の走行制御方法
【課題】走行速度可変の自走式搬送用走行体1を作業区間WAに一定の作業速度VLまで減速させた状態で進入させること。
【解決手段】各搬送用走行体1には、前後に隣り合う搬送用走行体1間でデータ通信を行うデータ通信手段13,14が設けられ、作業区間WAの上手側走行経路中には、計測起点P1が設定され、作業区間WAへ高速で接近する後ろ側搬送用走行体1Zとその前方の作業速度VLで走行する前側搬送用走行体1Yには、計測起点P1からの走行距離に相当する現在位置情報を持たせ、後ろ側搬送用走行体1Zでは、自体の現在位置情報と前記データ通信手段を介して受け取った前側搬送用走行体1Yの現在位置情報とに基づいて前側搬送用走行体1Yとの間の距離を演算させると共に当該距離の漸減変化に基づいて減速制御を行わせ、前記距離が設定値に達したドッキング完了時に後ろ側搬送用走行体1Zが作業速度VLで自走しているように制御する。
(もっと読む)
搬送用走行体の走行制御方法
【課題】地上側から作業区間WA内の全ての搬送用走行体1に対して走行可信号を確実に伝送する手段のコストダウン、実施の容易化を図る。
【解決手段】各搬送用走行体1には、作業区間WA内において前後に隣り合う搬送用走行体1間でデータ通信を行うデータ通信手段13,14と、地上側通信装置との間でデータ通信を行う機上側通信装置15が設けられ、前記作業区間WAの一端部には、通過する搬送用走行体1の前記機上側通信装置15に走行可信号を送信する地上側通信装置18a,18bが配設され、この地上側通信装置18a,18bから受信した走行可信号を、作業区間WA内を走行する他の全ての搬送用走行体1に前記データ通信手段13,14を介して伝送し、作業区間WA内の各搬送用走行体1を、受信した走行可信号に基づいて作業速度で自走させる。
(もっと読む)
無人車両の走行システムおよび走行経路生成方法
【課題】経由点を最適な地点に設定する。
【解決手段】走行経路10上にあって積込点12の手前のスイッチバック点13を、積込点12の位置移動に応じて位置移動する移動地点としてその初期位置情報を指示する。指示されたスイッチバック点13の初期位置情報と、積込点12の位置情報とに基づいて、積込点12とスイッチバック点13との相対位置関係Aの情報を生成する。積込点12の位置が移動すると、当該位置移動後の積込点12´の位置情報と、当該積込点12´における無人車両20´の向きの情報と、相対位置関係Aの情報とに基づいて、当該相対位置関係Aを維持できる位置に新たなスイッチバック点13´を設定し、新たなスイッチバック点13´を経て位置移動後の積込点12に至る走行経路10´を生成する。
(もっと読む)
搬送車システム
【課題】複雑な処理を行うことなく搬送車の集中を防ぎ、搬送車を効率良く運用することができる搬送車システムを提供する。
【解決手段】第一ステーションエリア20と第二ステーションエリア30との間の搬送経路を走行し物品の搬送を行う複数の搬送車200と、複数の搬送車200を制御する制御装置100とを備える搬送車システム10であって、制御装置100は、ステーション21への物品の搬出に向かう搬送車200であって、搬送経路内の所定区間を走行する搬送車200である対象搬送車の台数を計測する計測部110と、計測部110が計測した台数が所定の値を超えた場合に、対象搬送車に含まれる少なくとも1台の搬送車に、ステーション21への物品の搬出後に、ステーション22からの物品の搬入を行わせる搬出入指示部120とを備える。
(もっと読む)
無人搬送車および走行制御方法
【課題】作業番地への停止において、精度の高いコンベアへの横付けが可能な無人搬送車および走行制御方法を提供することを目的とする。
【解決手段】コンベア12に設置されている反射板11へ光を照射し、反射板11から反射した信号光を受光することによって物体の存在を検出する光電センサを、無人搬送車1の側面前後にそれぞれ1つづつ備えるとともに、無人搬送車1とコンベア12とを検知する手段を備え、無人搬送車1の側面前後に備えられている光電センサの双方が反射板から反射した信号光を受光すると、操舵輪をコンベア12方向へ操舵し、無人搬送車1とコンベア12との距離が所定の距離となるまで無人搬送車1をコンベア12方向へ走行させることを特徴とする。
(もっと読む)
搬送車システム
【課題】 搬送車に効率的に充電できるシステムを提供する。
【構成】 蓄電部材を電源として走行する複数台の搬送車を、所定の走行経路に沿って、地上側コントローラの制御下に走行させる。走行経路は搬送車の蓄電部材への充電設備を備えた充電エリアを備え、搬送車は位置と蓄電部材の残容量とを地上側コントローラへ報告する。地上側コントローラは、蓄電部材の残容量が閾値以下の搬送車を充電エリアへ走行させて、蓄電部材に充電させると共に、搬送要求に応じて充電エリア内の搬送車を充電エリア外の位置へ走行させる。
(もっと読む)
自律走行体移動システム
【課題】他の通信端末からの発呼があっても機能を維持可能な自律走行体移動システムを提供する。
【解決手段】自律走行体移動システムは、自律走行体と、エレベータ制御装置と、第1中継装置と、を備える。自律走行体は、エレベータが設置された建物において、エレベータ籠に乗降して目的階に移動可能である。エレベータ制御装置は、自律走行体から受信した信号に基づいてエレベータを制御可能である。第1中継装置は、自律走行体とエレベータ制御装置との間で送受信される信号を中継しており、通信端末との接続が確立された時点から予め設定した時間内に特定の信号を受信できない場合に、当該接続を切断する。
(もっと読む)
自律走行体移動システム
【課題】送信出力が高い信号を用いることなく、エレベータと自律走行体とを連携して動作させる自律走行体移動システムを提供する。
【解決手段】自律走行体移動システム1は、自律走行体40とエレベータ制御装置21と第1中継装置22と第2中継装置32とを備える。エレベータ制御装置21は、自律走行体40の信号に基づいてエレベータを制御する。第1中継装置22は、自律走行体40がエレベータ籠31の外部に位置するときに当該自律走行体40と無線による信号の送受信を行い、自律走行体40とエレベータ制御装置21との間で送受信される信号を中継する。第2中継装置32は、自律走行体40がエレベータ籠31の内部に位置するときに、当該自律走行体40と無線による信号の送受信を行う。第2中継装置32は、更に、第1中継装置22と有線による信号の送受信を行い、自律走行体40とエレベータ制御装置21との間で送受信される信号を中継する。
(もっと読む)
無人走行車両の誘導装置及び無人走行車両の誘導方法
【課題】GPSが使用できない場所でも無人走行車両を精度良く目標地点へ到達させることができる誘導装置及び誘導方法を得ることを目的とする。
【解決手段】誘導装置は、ステップ102において、無人走行車両が有するカメラで撮影された撮影画像から指定された複数の教示点Pn、及び無人走行車両が移動する移動領域を平面で示した移動地図から指定された複数の教示点Qnに基づいて無人走行車両の現在位置を導出する。そして、誘導装置は、ステップ116において、無人走行車両が導出された現在位置を起点として目標地点まで自律走行している途中で、計測手段による計測誤差の累積値が所定値に達した場合に、無人走行車両が有するカメラで新たに撮影された撮影画像から指定された複数の教示点Pn、及び移動地図から指定された複数の教示点Qnに基づいて無人走行車両の現在位置を再び導出する。
(もっと読む)
移動可能領域抽出装置および移動可能領域抽出方法
【課題】移動体が移動する移動領域内の障害物を検出する際に、人や他の自律移動ロボットなど、移動経路上から移動する移動体を障害物として抽出することなく、移動体が目的地まで効率良く移動することができる移動経路を生成するための移動可能領域抽出装置および移動可能領域抽出方法を提供する。
【解決手段】第1の距離センサが観測した距離の情報に基づいて、障害物の領域を表す第1の障害物領域を検出する第1の障害物検出手段と、第2の距離センサが観測した距離の情報に基づいて、障害物の領域を表す第2の障害物領域を検出する第2の障害物検出手段と、第2の障害物領域に基づいて継続的に移動している障害物を移動物として検出し、第1の障害物領域から、該検出した移動物の領域を表す第1の障害物領域を除いた領域を、移動体が移動することができる移動可能領域として抽出する障害物領域抽出手段と、を備える。
(もっと読む)
ロボット掃除機、並びにロボット掃除機を用いた遠隔監視システム及びロボット掃除機を用いた遠隔監視方法
【課題】掃除又は走行時に作成した掃除地図を提供し、特定の位置又は領域の監視画像を提供するロボット掃除機を備えることにより、掃除地図上の特定の位置又は領域にロボット掃除機を移動させたり、該当領域の掃除を行わせたりするように制御することができ、該当領域の監視画像を提供することにより、遠隔監視効率及びシステムの運用効率を向上させ、ユーザの利便性を向上させることができるロボット掃除機、並びにそれを用いた遠隔監視システム及びその遠隔監視方法を提供する。
【解決手段】ロボット掃除機100は、掃除領域を撮影して監視画像を生成する少なくとも1つの監視カメラ110と、ロボット掃除機100を駆動し、掃除領域を探索して掃除地図を作成する制御ユニット130と、監視画像及び掃除地図を外部装置に送信し、外部装置から制御命令を受信する通信サーバ120と、を有する。
(もっと読む)
無人搬送車走行方法及び無人搬送車走行システム
【課題】合流点や交差点での無人搬送車の待ち合わせの発生を抑えることができる無人搬送車走行方法及び無人搬送車走行システムを提供する。
【解決手段】無人搬送車走行システム1は、複数台の無人搬送車(AGV)2と、コントローラ6と、メモリ8とを備えている。無人搬送車2は、予め決められた走行経路に沿って走行し、移載装置に荷物を搬送する。メモリ8には、無人搬送車2が走行する走行経路を複数のブロックに分割してなる走行経路ブロックデータが設定記憶されている。コントローラ6は、無人搬送車2により搬送される荷物が移載装置に到着する予定時刻を計算し、出発地ブロックから目的地ブロックまでの各ブロックにおける無人搬送車2の通過時刻を、目的地ブロックから出発地ブロックに向かって順次予約していき、無人搬送車2が走行を開始する時刻を求め、その走行開始時刻のデータを当該無人搬送車2に送信する。
(もっと読む)
物品搬送装置
【課題】低コストの簡易な制御手段であっても制御できるように制御条件を簡素化することができる物品搬送装置を提供すること。
【解決手段】複数台のトラバーサ4a,4b,4cが同一のレール5に沿って走行されるとともに、このレール5の複数箇所に設けられるコンベヤ14〜18にて、各トラバーサ4a,4b,4cにコンテナ2が移載されるようになっており、所定の制御条件に基づいて、トラバーサ4a,4b,4cをコンベヤ14〜18に移動させる制御を行う制御手段が設けられる物品搬送装置1であって、制御条件によって、各コンベヤ14〜18が各トラバーサ4a,4b,4cの配置に対応させて予めグループ化されており、制御手段は、各トラバーサ4a,4b,4cが対応するグループS1〜S3のコンベヤ14〜18に向かう動作を互いに同期させる制御を行う。
(もっと読む)
1 - 20 / 118
[ Back to top ]