
Fターム[5H303DD07]の内容
位置、方向の制御 (6,897) | アクチュエータ、伝動手段、機械要素 (843) | 流体を利用したもの (41) | 油圧回路 (8)
Fターム[5H303DD07]に分類される特許
1 - 8 / 8
アクチュエータ駆動式且つフィードフォワード制御式の太陽追尾システム
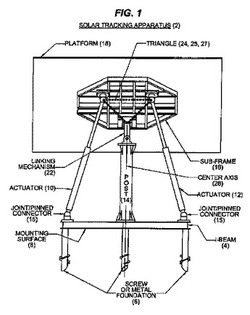
アクチュエータ駆動式且つフィードフォワード制御式の太陽追尾システムは、少なくとも1枚のソーラーパネルを支持するサブフレームと、サブフレームを支持する支柱と、サブフレームと支柱とを連結するリンク型連結機構とを備えている。リンク型連結機構は、第1枢軸と、第2枢軸と、ボディ部材とを含んでいる。リンク型連結機構の第1枢軸と第2枢軸とは、それらの延在方向が実質的に互いに直交しており、ボディ部材によって離隔されている。このシステムは更に、少なくとも2つの直動型アクチュエータと、それらアクチュエータとサブフレームとを連結する回転ジョイント型連結機構と、それらアクチュエータを駆動する駆動系とを備えている。このシステムは更に、フィードフォワード制御系を備えている。フィードフォワード制御系はコンピュータを含み、このコンピュータは、複数のデータ点を入力として用いて直動型アクチュエータの目標動作位置を算出し、そして、駆動系とコミュニケートして直動型アクチュエータを駆動する。このシステムは更に、フィードバック制御系を備えている。フィードバック制御系は、センサデバイスによって収集された情報をフィードフォワード制御系へ中継し、フィードフォワード制御系とフィードバック制御系とは統合された1つの制御系として機能する。 (もっと読む)
位置決めテーブル、位置決めクランプ装置、及びメインボディ用位置決め装置。

【課題】多段階の位置決めが可能であり、故障や停電等の電気系統のトラブルが発生した際の復旧が極めて容易な汎用位置決めテーブルを提供する。
【解決手段】汎用位置決めテーブル1は、一方向に摺動可能なテーブル11と、当該一方向と平行をなす軸を中心に回転可能なシャフト131と、シャフト131の側面上に設けられた、摺動するテーブル11を停止させるための複数のストッパ132と、を備えている。ここで、摺動するテーブル11は、複数のストッパ132のうちシャフト131の回転により切り替え可能な一のストッパ132に当接することで停止させられる。
(もっと読む)
流体船積みおよび/または荷降ろしシステム用の直接制御、特に比例制御および/または直線的制御式装置
本発明は、海洋船積みシステム(2)用の結合器の動きと位置決めのための制御装置に関する。前記海洋船積みシステムは、ベースに固定されているライン端部を有する少なくとも1つの流体移送ラインと、目標ダクトへの接続用に適合されている結合器が設けられている可動ライン端部とを備え、前記システムは、ベースに対して少なくとも3自由度を結合器が有するように、複数の機械的接続部を更に有しており、制御装置は、それぞれが自由度においてシステムの動きを比例的に制御する少なくとも3つの比例式制御アクチュエータ(27、28、29)と、各自由度を追尾するシステムの位置センサ(30、31、32)と、結合器を動かすコマンドを入力するためのコマンド入力インタフェース(60)と、結合器の瞬間的位置を、センサから提供される情報から計算し、コマンド入力インタフェースの動きコマンド入力から、アクチュエータの組み合わされた動きが、コマンド入力インタフェースにおいてオペレータにより提供される動きコマンドに対応する結合器の動きとなるように、アクチュエータのそれぞれに与える同時制御指令を計算する計算機(41)と、を備える。 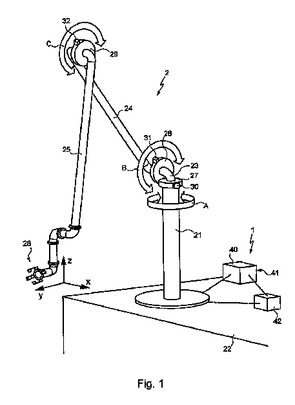 (もっと読む)
(もっと読む)
スライド駆動装置
【課題】複数のスライド部が同期してスライド駆動可能なスライド駆動装置を提供する。
【解決手段】スライド駆動装置1では、可動プレート106とスライドブロック11におけるフランジ113、114との間にワイヤ131、132が張設されている。また、可動プレート106とスライドブロック12におけるフランジ123、124との間にワイヤ141、142が張設されている。ワイヤ131、132、141、142は、プーリ151〜153、161〜163などを介して張設されている。可動プレート106が一の方向に移動するとき、ワイヤ131、141およびワイヤ132、142の一方に引っ張り力が作用し、他方が送出されることにより、可動プレート106の移動量に応じたストロークをもってスライドブロック11、12がY軸方向にスライドする。
(もっと読む)
パワーアシストロボット
【課題】操作者の操作力を増幅して操作者の作業をアシストするパワーアシストロボットの利便性を向上させる。
【解決手段】パワーアシストロボット10は、駆動源11と、操作者によって操作される操作部12と、対象物に力を与える作業部13と、操作部12に入力された操作力を増幅し、増幅した力を駆動源11を介して作業部13に供給する増幅部14と、作業部13が操作部12の操作に追従するように制御を行う制御部16と、作業部13が操作部12の操作に追従しているか否かを表す状態であるパワーアシスト状態を判断するパワーアシスト状態判断部17と、パワーアシスト状態が不安定であるときに操作者等に対して所定の提示を行う状態提示部20と、を備えている。
(もっと読む)
自給式液圧アクチュエータ・システム
【課題】 駆動方向を容易に変更できる液圧線形アクチュエータ・システムを提供する。
【解決手段】 本発明の液圧線形アクチュエータ・システムは、ほぼ一定の速度で一方向に回転するよう構成されたポンプを有する。その方向とシステムを通る流体の速度は、ポンプのロータとステータとの間の位置関係を調節することによる制御される。この位置関係は、順方向流状態と、非流通状態と、逆方向流状態の間で調節可能である。液圧線形アクチュエータは、システムを通る流体の流れに反応して、ポンプの順方向流状態による第1方向とポンプの逆方向流状態による第2方向に移動する。
(もっと読む)
シリンダの位置計測装置
【課題】
シリンダチューブが厚く磁気シールドとして機能している場合であっても、簡単な構造で低コストをもって、磁力センサで磁力線を検出しやすくして、シリンダの位置計測を精度を向上させる。
【解決手段】
ピストン201に磁石350を設ける。シリンダチューブ250の外側、磁石350で生成された磁力を検出する磁力センサ301、302を設ける。磁性材料で構成され、磁力センサ301、302を覆うひさしであって、磁石350を起点とする磁力線が磁力センサ301、302を通り磁石350に戻る経路を形成するような形状、大きさに形成されているひさし310を設ける。磁力センサ301、302は、磁性体で構成されたバンドであって、シリンダチューブ250の外周に圧接されて固定されたバンド320に、装着される。
(もっと読む)
位置制御システム
【課題】 油圧アクチュエータにより動作制御される制御対象の位置制御を行う位置制御システムにおいて、ポペット型電磁弁を用いて油の流量制御を行い、弁からの油漏れを抑制すると共に制御対象の位置制御を精度よく行うことのできる位置制御システムを提供する。
【解決手段】油圧アクチュエータ101により動作制御される制御対象105の位置制御を行う位置制御システム100であって、前記油圧アクチュエータ101の駆動制御を行う電磁弁1〜4と、前記電磁弁1〜4を介して前記油圧アクチュエータ101に油を供給するポンプ8と、前記電磁弁1〜4の開閉動作をパルス幅変調制御により行う弁作動手段12、13と、前記制御対象105の位置を検出する位置検出手段6と、前記電磁弁1〜4に供給される油の温度を検出する油温度検出手段10と、前記位置検出手段6が検出した位置及び前記油温度検出手段10が検出した油温度に基づき前記弁作動手段12、13が制御するパルス幅のデューティ比を決定する制御計算手段20とを備える。
(もっと読む)
1 - 8 / 8
[ Back to top ]