
Fターム[5H303DD08]の内容
位置、方向の制御 (6,897) | アクチュエータ、伝動手段、機械要素 (843) | 流体を利用したもの (41) | 空気圧回路、エアシリンダ (17)
Fターム[5H303DD08]に分類される特許
1 - 17 / 17
位置決め装置
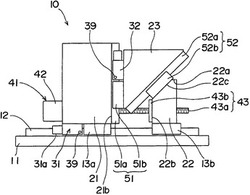
【課題】位置決め対象物を一台の駆動装置により互いに直交する二方向、例えば、水平方向と垂直方向とのそれぞれに移動させて位置決めすることができる位置決め装置を提供すること。
【解決手段】基台11に設けられたレール12の上にそれぞれ摺動可能に立設された第1のスライド部材21と第2のスライド部材22、但し、第1のスライド部材には、レールとの係合により第1のスライド部材を一時的に固定することのできる第1の仮固定機構31が設けられており、また第2のスライド部材には、斜面22cが設けられている;第1のスライド部材の側面21bと第2のスライド部材の斜面22cとにより摺動可能に係合支持された楔状の位置決め対象物支持部材23、但し、対象物支持部材23には、上記係合支持を一時的に固定することのできる第2の仮固定機構32が設けられている;そして、第2のスライド部材のレール上での摺動を駆動する駆動部材41を含む位置決め装置。
(もっと読む)
太陽光パネルユニット

【課題】屋根に作用する荷重を軽減可能で、且つ、設計自由度の高い太陽光パネルユニットを提供すること
【解決手段】回動軸(14)が設けられた太陽光パネル(11a,11b)と、太陽の向きに応じて太陽光パネル(11a,11b)を回動軸(14)の軸周りに回動させる駆動機構(20)とを備えている。駆動機構(20)は、空気圧によって屋根(R)と平行に伸縮変形するエアシリンダ(21,22)と、太陽光パネル(11a,11b)に連結され、エアシリンダ(21,22)の伸縮動作をその変位量よりも大きい変位量となるように屋根(R)の略鉛直方向の動作に変換して太陽光パネル(11a,11b)を回動させるリンク機構(30)とを備えている。
(もっと読む)
ワーク移動装置及び円柱状ワークの調芯装置
【課題】本発明は、位置決めの正確性を低下させずに処理速度を迅速化可能なワーク位置決め装置及び円柱状ワークの調芯装置を提供することを目的としている。
【解決手段】本発明に係わるワーク移動装置は、ワークを一の方向に移動させるためのワーク移動装置であって、ワークを一面に載置する載置手段と、空気圧で押圧され一の方向に移動する推進部材を有するとともに推進部材の先端がワークを望む状態で配置された空気圧アクチュエータと、推進部材に取り付けられた圧電素子と、ワークに当接可能に圧電素子に取り付けられた衝撃体と、ワークの位置を検出する検出手段と、空気圧アクチュエータへ供給される空気の空気圧を調整する空気圧調整手段とを備え、空気圧調整手段は、位置検出手段の検出したワークの位置とワークが位置すべき所望の位置との偏差に基づいて前記一の方向に推進部材を押圧する場合の空気圧を調整することを特徴としている。
(もっと読む)
アクチュエータおよび制御方法
【課題】非線型特性によるサーボ弁の制御性低下を防止する。
【解決手段】中空のシリンダと、シリンダに収容されて、シリンダと共に一対の圧力室を形成しつつ、シリンダに対して相対移動するピストンと、一対の圧力室の各々を、作動流体の圧力源または排気部に対して連通または遮断させる一対の制御弁と、シリンダに対するピストンの位置を検出する位置検出器と、一対の圧力室の少なくとも一方から作動流体を排気させる排気弁と、位置検出器が検出する位置が所与の目標位置に近づくように、制御弁を制御する制御部とを備える。
(もっと読む)
位置決め装置および制御方法
【課題】静止安定性を有する位置決め装置。
【解決手段】対象物を移動させる駆動力を発生する駆動部と、対象物を目標位置に向かって移動させるべく駆動部をサーボ制御する制御部と、対象物を、駆動力よりも大きな固定力で固定する固定部とを備え、移動した対象物が目標位置に到達した後、少なくとも固定部が対象物を固定するまで、制御部は、対象物が移動していた期間のサーボゲインよりも小さなサーボゲインでサーボ制御を継続する。上記位置決め装置において、浮上力を発生させて対象物を浮上させる浮上力発生部を更に備え、浮上力発生部が浮上力の発生を停止した後、少なくとも少なくとも固定部が対象物を固定するまで、制御部は、力発生部が対象物を浮上させていた期間のサーボゲインよりも小さなサーボゲインでサーボ制御を継続してもよい。
(もっと読む)
アクチュエータおよび制御方法
【課題】複動型シリンダを有するアクチュエータの動作を安定させる。
【解決手段】中空のシリンダと、シリンダに収容されて、シリンダと共に一対の圧力室を形成しつつ、シリンダに対して相対移動するピストンと、一対の圧力室の各々を、作動流体の圧力源または排出部に対して連通または遮断させる一対の制御弁と、シリンダに対するピストンの位置を検出する位置検出器と、一対の圧力室の各々における作動流体の圧力を個別に検出する一対の圧力検出器と、位置検出器が検出する位置が所与の目標位置に近づき、且つ、圧力検出器が検出する圧力の平均が所与の目標圧力に近づくように、制御弁を制御する制御部とを備える。
(もっと読む)
位置決めテーブル、位置決めクランプ装置、及びメインボディ用位置決め装置。
【課題】多段階の位置決めが可能であり、故障や停電等の電気系統のトラブルが発生した際の復旧が極めて容易な汎用位置決めテーブルを提供する。
【解決手段】汎用位置決めテーブル1は、一方向に摺動可能なテーブル11と、当該一方向と平行をなす軸を中心に回転可能なシャフト131と、シャフト131の側面上に設けられた、摺動するテーブル11を停止させるための複数のストッパ132と、を備えている。ここで、摺動するテーブル11は、複数のストッパ132のうちシャフト131の回転により切り替え可能な一のストッパ132に当接することで停止させられる。
(もっと読む)
スライド駆動装置
【課題】複数のスライド部が同期してスライド駆動可能なスライド駆動装置を提供する。
【解決手段】スライド駆動装置1では、可動プレート106とスライドブロック11におけるフランジ113、114との間にワイヤ131、132が張設されている。また、可動プレート106とスライドブロック12におけるフランジ123、124との間にワイヤ141、142が張設されている。ワイヤ131、132、141、142は、プーリ151〜153、161〜163などを介して張設されている。可動プレート106が一の方向に移動するとき、ワイヤ131、141およびワイヤ132、142の一方に引っ張り力が作用し、他方が送出されることにより、可動プレート106の移動量に応じたストロークをもってスライドブロック11、12がY軸方向にスライドする。
(もっと読む)
位置決め装置、露光装置およびデバイス製造方法
【課題】 ステージの移動に伴う反力を質量体を駆動して軽減させつつ、質量体の移動ストロークの縮小を図る。
【解決手段】 質量体を駆動する慣性力付与機構を有する位置決め装置であって、慣性力付与機構は、ステージの移動に伴って発生する反力を軽減するための信号を生成して出力する反力補償制御系と、質量体の位置を計測する位置計測手段の出力に基づいて、蓄積された複数の質量体の相対距離を低減するための信号を生成して出力する位置補償制御系と、位置補償制御系の出力の一部を選択して出力する選択手段とを備え、選択手段の出力に基づいて質量体の駆動が制御される。
(もっと読む)
テーブル位置制御装置及びテーブル移動装置
【課題】xyθ移動機構において、x移動、y移動、θ回転の間の干渉による誤差を抑制することである。
【解決手段】テーブル移動装置10は、テーブル移動機構100と、制御回路20とを含んで構成される。制御回路20は、指令取得部22と、指令データにx位置等をフィードバックするための減算器24と、指令データについて制御された出力である移動指令値等に変換する制御アルゴリズム部26と、x移動、y移動、θ回転の間の相互干渉を除去する処理を行う補正部28と、補正された移動指令値等を個々の気体圧制御アクチュエータの電流駆動指令に変換してテーブル移動機構100に供給する駆動信号変換部30と、テーブル移動機構100からの各センサのデータをx座標、y座標、回転角度θに変換して減算器24に入力する位置情報変換部32を含む。
(もっと読む)
位置決め制御システム及びフィルタ
【課題】外乱オブザーバを用いることにより制御精度を向上させるとともに、ワインドアップ現象を防止する。
【解決手段】位置決め制御システム10は、制御対象Pのシリンダ12の進退量Yから外乱Dを推定してフィードバックを行う外乱オブザーバ46と、該外乱オブザーバ46によるフィードバックループ内に設けられた飽和要素48及び低域通過要素Qと、飽和要素48の飽和値Lを偏差εに基づいて変化させる飽和値変更部50とを有する。飽和要素48は正帰還のマイナーループ70内の前向き通路に設けられている。低域通過要素Qは正帰還のマイナーループ70内のフィードバック通路に設けられている。
(もっと読む)
インパクト駆動アクチュエータ
【課題】 設置位置の調整の手間がなく簡単に移動対象物の位置を検知することができるインパクト駆動アクチュエータを提供する。
【解決手段】 インパクト駆動アクチュエータ100は、パルス電圧の印加により急峻な変形を起こし、衝撃的な慣性力を移動対象物21に与えて移動対象物21を移動させる積層型圧電素子110と、該圧電素子110を移動対象物21に接触させるエアシリンダ120と、圧電素子110と一体的に設けられて移動対象物21の位置を検知する接触式の変位センサ140とを有する。
(もっと読む)
気体制御回転移動装置及び気体制御アクチュエータ
【課題】テーブルの気体制御回転移動において、気体制御アクチュエータの先端部と移動対象物との間に気体を導入したときの先端部における実効負荷力を向上させることである。
【解決手段】テーブル50を駆動する気体制御アクチュエータ200は、案内部202に案内されてその軸方向に移動可能な第1可動体204と、その先端の曲面座で底面が支持される第2可動体206とを含む。案内部202の底部には、供給口CP1から駆動気体圧が導かれる。テーブル50のタンク56からは、絞り部58、軸側伝達気体供給路60を介して、矩形軸54の気体受面208と第2可動体206の先端面210との間の隙間に、駆動気体圧より高い伝達気体圧を有する気体が供給される。
(もっと読む)
集積された運動量壁
軸を有するスラット(206)と、スラット(206)に配置された複数のマイクロホイール(204)であって、各マイクロホイール(204)は第1のステータウェーハ(208)と、第2のステータウェーハ(210)と、第1および第2のステータウェーハの間に配置されたロータウェーハ(212)とを有し、第1および第2のステータウェーハ(208、210)はロータウェーハ(212)をスピンさせる構成とされる複数のマイクロホイール(204)と、スラット(206)に接続されかつスラット(206)を少なくとも部分的に軸中心に回転させる構成とされるアクチュエータ(104)とを含むビークル制御システム(200)が提供される。 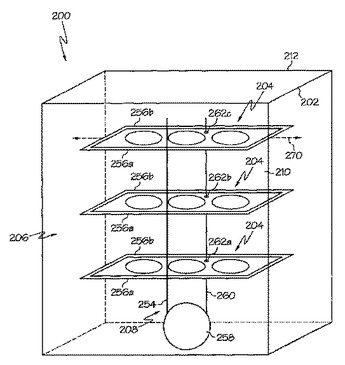 (もっと読む)
(もっと読む)
XYステージ
【課題】 ヨーイング、ピッチング及びローリング、コギング、速度制御におけるループゲイン、デッドタイム発生回路に起因する位置決め精度向上の障害要因に対応した補正手段を備えた、複数のスライダ部を有するXYステージを実現する。
【解決手段】 格子プラテン上のスライダ部を2次元方向に位置制御するXYステージにおいて、
独立に位置制御される複数のスライダ部を有し、これらスライダ部の夫々は、スライダ部をX軸方向及びY軸方向に位置制御する位置制御手段と、スライダ部のZ軸まわりのヨーイングを補正するヨーイング補正手段を備える。
(もっと読む)
弾性体アクチュエータ駆動型可動機構の制御装置及び制御方法
【課題】 弾性体アクチュエータで駆動される可動機構を応答性良くかつ位置決め精度良く制御できる弾性体アクチュエータ駆動型可動機構の制御装置及び方法を提供する。
【解決手段】 流体圧駆動アクチュエータ1の内部圧力を圧力計測手段9で計測し、流体圧駆動アクチュエータにより発生する駆動トルクをトルクセンサー7で計測し、可動機構の変位量を計測し、変位の目標値と計測値とが入力されて位置誤差を位置誤差補償手段12で補償し、位置誤差補償手段の出力と駆動トルクの計測値とが入力されて駆動トルク誤差を駆動トルク誤差補償手段25で補償し、駆動トルク誤差補償手段の出力と圧力差の計測値とが入力され圧力差誤差を圧力差誤差補償手段15で補償する。
(もっと読む)
XYステージ
【課題】 スライダ部の加速時、減速時、定速移動時の振動発生時にピッチング及びローリングを抑制する機能を具備したXYステージを実現する。
【解決手段】 スライダ部を2次元方向に位置制御するXYステージにおいて、スライダ部のピッチング角速度を検出するための信号を出力する第1のZ軸センサと、スライダ部のローリング角速度を検出するための信号を出力する第2のZ軸センサとを有することを特徴とするXYステージである。
(もっと読む)
1 - 17 / 17
[ Back to top ]