
Fターム[5H303DD28]の内容
位置、方向の制御 (6,897) | アクチュエータ、伝動手段、機械要素 (843) | チェーン、ベルト、ワイヤ、ロープ、プーリ (21)
Fターム[5H303DD28]に分類される特許
1 - 20 / 21
同期制御装置及び画像形成装置
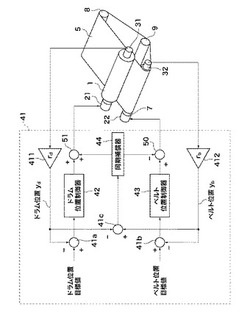
【課題】像担持体と中間転写体との間の同期誤差を低減して、色ずれ等の画像不良の発生を低減する。
【解決手段】像担持体と中間転写体とを同期制御する際、同期補償器44は像担持体の検出位置と中間転写体の検出位置との間の同期誤差に応じて像担持体及び中間転写体を駆動する際の第1及び第2のトルク補償量を求める。ドラム位置制御器42は像担持体の検出位置とその目標位置との偏差である第1の位置偏差に応じて第1のフィードバック量を生成する。ベルト位置制御器43は中間転写体の検出位置とその目標位置との偏差である第2の位置偏差に応じて第2のフィードバック量を生成する。加算器51は第1のトルク補償量と第1のフィードバック量とに応じて像担持体を駆動制御する。減算器50は第2のトルク補償量と第2のフィードバック量とに応じて中間転写体を駆動制御する。
(もっと読む)
アライメントステージ及び処理装置

【課題】駆動効率及び動作速度を確保できるとともにコンパクトに構成でき、しかも、製造コストを低減することのできるアライメントステージ及び処理装置を提供する。
【解決手段】本発明のアライメントステージ10は、第1の回転駆動手段と、第2の回転駆動手段と、第1の回転軸線11xを中心に回転可能に軸支されるとともに第1の回転駆動手段により回転駆動される第1の回転体11と、第1の回転体に対して第1の回転軸線と平行な第2の回転軸線12xを中心に回転可能に軸支されるとともに第2の回転駆動手段により回転駆動される第2の回転体12と、第2の回転体と一体に構成され、或いは、第2の回転体に固定若しくは連結された移動ステージ13と、を具備し、第2の回転駆動手段は、第1の回転軸線を中心に回転する第2の回転駆動軸4と、第2の回転駆動軸と第2の回転体との間に接続された第2の回転伝達機構9と、を有することを特徴とする。
(もっと読む)
補正用治具
【課題】レーザ測長機等の高度な装置や複雑な手間を要することなく、しかも部品実装装置のX軸およびY軸の座標の補正を行う補正用治具を提供する。
【解決手段】マウントヘッドをX軸方向およびY軸方向に移動させて目標位置に部品を実装する部品実装装置の、X軸方向およびY軸方向の移動の補正値を求めるための補正用治具75であって、部品実装装置のX軸およびY軸にそれぞれ沿って配置される辺を有する矩形状の表面を有するガラスからなる本体部と、表面に形成され、マウントヘッドに搭載されたカメラでそれぞれ認識される、本体部の辺に沿ってX軸方向およびY軸方向にそれぞれ1列で配置された複数の観測点77,78と、を含み、表面内で1列に配置された複数の観測点77,78よりも内側の領域には他の観測点が設けられていない。
(もっと読む)
平面的拡張が容易な軽量薄型の太陽光集光器
【課題】太陽光集光器を大規模化する為に、各部材の応力と曲げモーメントを低減化する。太陽光集光器は小さな基礎モデルで成り立つ構成でも、大規模化すると構成部材の強度に支障が生じがちである。
【解決手段】反射板重量負荷を支える支持点を反射板列の中心線近傍に複数設ける事によって、各構成部材にかかる重量負荷を分散化させる事を、解決手段とする。主な構成物である反射板1を支えるには、反射板1の中心点で支持するのが最適である。さらに支持点が増えれば増えるほど太陽光集光器全体の重量は分散されるので、大規模化しても重量負荷がかさむことがない。
(もっと読む)
位置検出システム及びケーブルユニット
【課題】単純なシステムで位置制御を可能とし、設備費用を低減できる位置検出システム及びケーブルユニットを提供する。
【解決手段】位置検出システムは、所定の移動経路10に沿って移動可能な移動機20と、位置情報を記憶するとともに前記移動経路10に沿って並列配置された複数のICタグ34と、移動機20側に設けられ、対応する読取範囲A1に配された前記ICタグ34の位置情報を読み取る第1アンテナ26と、を備える。
(もっと読む)
駆動制御装置
【課題】運動伝達機構の経年劣化等を原因として、運動伝達率の値が変動した場合には、実際の運動伝達率に合わせて設定パラメータの値を変更することができると共に、設備の更新や部品交換等により、運動伝達機構が当初の運動伝達率を回復した場合には、直ちに、設定パラメータの値を初期状態へと簡単に復帰させる。
【解決手段】メモリの設定パラメータ格納領域には、運動伝達機構の初期状態及び経年状態に対応する運動伝達率に対応する単位変換比率の生成に必要な設定パラメータを格納するための第1及び第2の設定パラメータ格納領域が設けられ、それらの領域に格納された設定パラメータを参照することにより、所定の単位変換演算式にしたがって、標準単位系から駆動単位系へと単位変換を行う。
(もっと読む)
搬送制御装置、搬送装置の制御方法、及び観察装置
【課題】駆動機構の搬送量誤差と原点センサーの位置検出誤差を個別に加味した制御動作を実行する搬送制御装置を提供する。
【解決手段】本発明に係る搬送制御装置は、往復移動体を駆動する駆動機構と、原点センサー5と、駆動機構2の駆動量を検出する駆動量検出手段と、往復移動体が静止状態から移動状態に移行した時点を光学的に検知する移動検知手段とを具え、原点センサー5が第1出力状態から第2出力状態となるまで往復移動体を一方向に移動させた後、原点センサー5が第2出力状態から第1出力状態となるまで往復移動体を逆方向に移動させ、原点センサー5が第2出力状態となった後に往復移動体が静止状態から移動状態へ移行するまでの第1の駆動量と、往復移動体が移動状態へ移行した後に原点センサーが第1出力状態となるまでの第2の駆動量とを取得する。
(もっと読む)
位置決め制御システム
【課題】従来のビルの清掃作業手法に比べ、清掃用ゴンドラを上下駆動できる装置を簡単に設置することができ、しかも、作業が終了すれば簡単に撤去することができ、さらに、清掃用作業員が効率的に清掃作業を行うことができ、そして、安全で、安価に提供できる位置決め制御システムを提供することを目的としている。
【解決手段】位置決め制御システムは、夫々モータ3で回転駆動される複数のプーリー6と、該各プーリー6に夫々巻回されてなる索体7と、該各プーリー6に巻回されてなる少なくとも2本の索体7を使用して上方向に支持されてなる作業装置12と、前記各モータ3の回転駆動を夫々制御するモータ制御装置2と、前記各モータ制御装置2に前記モータ3の回転駆動量を指令する制御装置1とからなるものとしている。
(もっと読む)
スライド駆動装置
【課題】複数のスライド部が同期してスライド駆動可能なスライド駆動装置を提供する。
【解決手段】スライド駆動装置1では、可動プレート106とスライドブロック11におけるフランジ113、114との間にワイヤ131、132が張設されている。また、可動プレート106とスライドブロック12におけるフランジ123、124との間にワイヤ141、142が張設されている。ワイヤ131、132、141、142は、プーリ151〜153、161〜163などを介して張設されている。可動プレート106が一の方向に移動するとき、ワイヤ131、141およびワイヤ132、142の一方に引っ張り力が作用し、他方が送出されることにより、可動プレート106の移動量に応じたストロークをもってスライドブロック11、12がY軸方向にスライドする。
(もっと読む)
XY位置決め装置の駆動制御装置
【課題】複数のモータ軸を用いて1つの負荷を駆動する際に、モータ軸同士の干渉を抑えながら、最適な位置決め制御を可能とする。
【解決手段】複数のモータ軸を用いて1つの負荷Lを駆動するXY位置決め装置において、各モータ軸の制御系内に設けられた外乱オブザーバ68L、68Rと、該外乱オブザーバの出力部分に設けられた、位置偏差を監視し、位置偏差の量に応じて外乱オブザーバの出力を制限するオブザーバ出力調整部70L、70R、70と、を備え、位置偏差の量が多い場合には外乱オブザーバの出力を多く戻して積極的に補償を行ない、位置偏差の量が少ない場合には外乱オブザーバの出力を制限する。
(もっと読む)
位置決め制御装置とその制御方法
【課題】 機械位置のフルクローズドループ制御でありながら、モータ位置を制御した時と同等の応答性と機械位置を制御したときと同等の精度を得ることができる位置制御装置とその制御方法を提供する。
【解決手段】 位置指令とモータ位置信号とのモータ位置偏差から速度指令を生成する位置制御部(1)と、速度指令とフィードバック速度信号との速度偏差からトルク指令を生成する速度制御部(2)と、トルク指令に基づいてモータを駆動するトルク制御部(3)と、モータ位置信号からモータ速度信号を生成するモータ速度信号生成部(4)と、モータ速度信号をフィードバック速度信号とするフィードバック速度信号生成部(5)と、を備えた位置決め制御装置において、位置指令と機械位置信号との機械位置偏差から補正位置指令を生成する補正位置制御部(6)と、補正位置指令をオンするスイッチと、オンオフされた補正位置指令と位置指令を加算して新たな位置指令を生成する加算器(17)と、を備えた。
(もっと読む)
無端移動部材駆動制御装置
【課題】画像形成装置において、温度変化が大きい環境でも、制御誤差の増加を抑えて、各色画像の重ね合わせの精度を高める。
【解決手段】ベルト1のマーク5を、2つのマーク検出手段A、Bで検出した2値化信号の位相差を求める。マーク検出手段の固定部材6の周囲温度を測定し、温度変化を計測する。温度変化と固定部材6の線膨張係数とマーク検出手段の間隔と目標速度から、固定部材6の熱膨張による位相差の計測誤差量を計算する。位相差初期値と計測位相差に基づいて、パルス周期の計測結果を補正する。位相差の計測誤差量を用いて、補正されたパルス周期の計測結果をさらに補正する。補正されたパルス周期の計測結果に基づく制御信号を用いて、速度制御や位置制御を行う。
(もっと読む)
モータ制御装置
【課題】基準信号が異常状態になっても、移動体を直ちに停止させないで目標の位置まで滑らかに、かつ安全に動作させることができるモータ制御装置を提供する。
【解決手段】ライン基準位置指令器44は、基準信号に基づく経過時間に対する位置の指令信号であるライン基準位置指令を設定し、異常検出器82は、ライン基準位置指令またはライン基準速度指令が異常であるとき、異常信号を出力する。擬似ライン基準位置指令発生器49は、異常発生前のライン基準位置指令に基づいて推測した擬似ライン基準位置指令を出力する。第1の切替器50は、異常が無い場合にライン基準指令信号を出力し、異常が有る場合に疑似ライン基準位置指令を出力する。
(もっと読む)
XYテーブルの原点復帰方法およびプログラム
【課題】X軸テーブルおよびY軸テーブルで原点センサを共用した場合にも、原点復帰処理を短時間に行うことを課題とする。
【解決手段】X軸スライダおよびY軸スライダを原点近傍センサに向かって原点方向に同時に移動させる復帰移動工程と、復帰移動工程の最終段階で、原点近傍センサが「ON」したら、X軸テーブルおよびY軸テーブルを駆動停止させた後、Y軸被検出子が原点近傍センサから外れるようにY軸スライダを反原点方向に所定の距離移動させて待機位置に位置させる停止・往動工程と、停止・往動工程により、原点近傍センサの「ON」が維持されたら、X軸テーブルの原点探査およびY軸テーブルの原点探査の順でX−Y原点探査を実行し、原点近傍センサが「OFF」したら、Y軸テーブルの原点探査およびX軸テーブルの原点探査の順でY−X原点探査を実行する原点探査工程とを備えた。
(もっと読む)
モータ制御方法及びモータ制御装置
【課題】 駆動対象を駆動するモータを速度フィードバック制御するにあたり、減速期間中の再加速の発生を防ぎ、再加速発生に起因して生じる騒音の発生を防止する。
【解決手段】 定速駆動状態から減速させて停止させるまでの減速期間において、速度フィードバック制御部へ入力する速度指令として、位置フィードバック制御により得られた速度指令ではなく、減速期間開始時からの経過時間の関数である減速関数を用いて得られた減速指令を用いる。この減速関数は、それ自体が単調減少するものであって、且つ、その導関数が単調関数若しくは定数となるような関数である。このような減速関数に基づいて生成される減速指令によりキャリッジを駆動させると、減速中に再加速することがなく、安定して速度が低下していく。そのため、キャリッジのメカ的なガタに起因する騒音発生も防止される。
(もっと読む)
デジタル速度制御装置、デジタルモータ制御装置、紙搬送装置、デジタル速度制御方法、その方法をコンピュータに実行させるプログラム、コンピュータ読み取り可能な記録媒体、および画像形成装置
【課題】正確な制御が可能なデジタル速度制御装置を提供する。
【解決手段】デジタル速度制御装置10は、搬送ベルト301の変位量を標本化周期に対応する最小単位の変位量の整数倍によって取得する移動距離検出装置500と、標本化時刻に基づいて搬送ベルト301の目標速度を算出する目標速度算出部101と、搬送ベルト301の現在速度を変位量および標本化時刻の差分で算出する現在速度算出部102と、目標速度が所定値よりも小さいか否かを判定する目標速度判定部105と、目標速度は所定値よりも小さく、かつ、現在速度は標本化周期あたり最小単位の変位量であると算出された場合、現在速度を設定値に置き換える速度補正部106と、置き換えた設定値と目標速度との誤差を算出する速度誤差算出部103と、速度誤差に基づいて駆動モータ200を制御する調節計部104と、を備える。
(もっと読む)
ガントリ型XY位置決め装置
【課題】種々の移動パターンにおいて最適な位置決め制御を行うことのできるガントリ型XY位置決め装置を提供する。
【解決手段】 X軸フレーム16のY軸フレーム14A、14B上の位置及び移動対象18のX軸上の位置を制御することにより、該移動対象18をX−Y平面内で移動・位置決め可能としたガントリ型XY位置決め装置GP3において、前記X軸フレーム16のY軸フレーム14A、14B上の位置を制御するためのY軸モータ20A、20Bの制御系内に、X軸フレーム16上での移動対象18の移動等に起因してY軸モータ20A、20Bが受ける外乱トルク相当分を推定するオブザーバ演算部80A、80Bを備え、該オブザーバ演算部80A、80Bでの推定値Teに基づいて、Y軸モータ20A、20Bの駆動指令値Itp(It)を補正する。
(もっと読む)
機械位置制御装置
【課題】 電動機による負荷の駆動系の剛性が低い場合でも、負荷位置信号をフィードバックして行う負荷の位置制御を、電動機位置信号だけをフィードバックするセミクローズ制御と同等の安定性で行えるようにすることで、高精度の負荷の位置制御を可能とする。
【解決手段】 負荷20の現在位置の計測値である負荷位置信号xlに対して、位相遅れに対する補償を安定化補償回路80において行ったあと、位置信号合成回路90において高調波部分は電動機20の現在位置の計測値である電動機位置信号xmに置き換て制御対象位置信号xfbとして、この制御対象位置信号xfbを位置制御回路110にフィードバックして、電動機30が負荷20を駆動するトルクの目標値を示すトルク指令信号を出力するように構成した。
(もっと読む)
位置決め制御装置
【課題】状態フィードバック制御により駆動ローラまたは用紙搬送ベルトの高速且つ確実な位置決めが可能な位置決め制御装置を提供する。
【解決手段】この位置決め制御装置は、用紙搬送ベルト駆動機構の位置決め制御を行うものであり、モータと減速機構を含む駆動側慣性体と、用紙搬送ベルトとこれを支えるローラ群とを含む従動側慣性体とが柔結合される2慣性体近似で構成される機構の場合に、従動側慣性体の軸に角度検出器を設けて、この角度検出器の出力を基に用紙搬送機構を状態フィードバック制御するものである。
(もっと読む)
駆動制御装置および画像形成装置
【目的】 エンコーダのディスク偏心により発生する無端移動部材の回動速度変動の安定化を簡易な構成で確実に行えるようにする。
【構成】 制御コントローラ部40は、目標角変位生成部30から受け取った目標角変位とエンコーダ31から出力合成回路700経由で受け取った検出角変位(実際にはエンコーダ31の出力信号に基づいて算出する)との差e(n)をとり、その差e(n)に基づいてパルス出力器37経由で駆動モータ32を駆動制御する。出力合成回路700は、エンコーダ31内の2つのセンサ(180度ずれた位置関係にある)の出力信号を合成し、その合成信号を1/2逓倍して出力する。
(もっと読む)
1 - 20 / 21
[ Back to top ]