
Fターム[5H303EE07]の内容
位置、方向の制御 (6,897) | 位置の設定内容、設定方法、設定手段 (374) | 任意の位置が設定可能であるもの (87)
Fターム[5H303EE07]の下位に属するFターム
Fターム[5H303EE07]に分類される特許
1 - 20 / 78
不感帯処理部を備えた電動機の制御装置
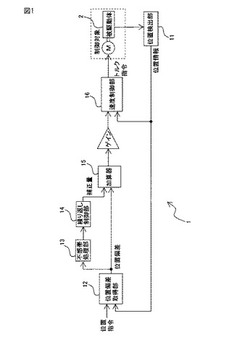
【課題】被駆動体を電動機によって同一動作パターンの繰り返し制御を行う場合において、被駆動体を停止させるために電動機の位置指令をゼロにしたときに発生し得る被駆動体の振動を抑制することができる電動機の制御装置を実現する。
【解決手段】電動機Mの制御装置1は、被駆動体2の位置を検出する位置検出部11と、電動機Mに与えられる位置指令と位置検出部11で検出した被駆動体2の位置との位置偏差をサンプリング周期毎に取得する位置偏差取得部12と、位置偏差取得部12により取得した位置偏差が所定の不感帯範囲内に含まれる場合は当該位置偏差をゼロに置き換えて出力する不感帯処理部13と、不感帯処理部13から出力された位置偏差がゼロになるような補正量を算出する繰り返し制御部14とを備え、位置偏差取得部12により取得した位置偏差と繰り返し制御部14により算出された補正量とに基づいて、電動機Mを制御する。
(もっと読む)
ステージ移動装置及び無接点充電器

【課題】可及的に安価で、モータ制御が簡単なステージ移動装置を提供する。
【解決手段】ステージ移動装置1を、1個の正・逆回転可能なモータ100と、互いに直角に交差して配置され、交差部分にステージ600を保持するX軸方向キャリッジ400X及びX軸方向キャリッジ400Xと、モータ100の回転力をX軸方向キャリッジ400XをX軸方向に移動させる経路に伝達するか、Y軸方向キャリッジ400YをY軸方向に移動させる経路に伝達するかをステージ600の移動目標に応じて切り替える動力伝達経路切替手段と、モータ100の回転軸の回転運動をX軸方向キャリッジ400Xの直線往復運動又はY軸方向キャリッジ400Yの直線往復運動に変換する運動方向変換手段と、X軸方向キャリッジ案内手段及びY軸方向キャリッジ案内手段と、ステージ600の移動目標に応じてモータ100の回転方向及び回転角度を制御するモータ制御装置とで構成した。
(もっと読む)
機器移動システム
【課題】機器移動システムにおいて、所定の移動面に沿って任意の機器を任意方向に自律的に移動可能とする。
【解決手段】機器移動システム1は、所定の移動面Sに沿って移動することができる移動ユニット2を備える。移動ユニット2は、任意の機器10が搭載される移動体11と、移動体11に一体的に設けられたアクチュエータ3と、移動体11を移動面Sに拘束する拘束装置13とを備える。アクチュエータ3は、電磁力に基づく衝撃を発生し、移動体11を衝撃力の方向に移動させる。拘束装置13は、移動ユニット2を移動面Sに対して移動自在かつ摩擦力が発生するように機械力または電磁気力により拘束する。機器10が受電機器に給電する給電用1次コイルであり、受電機器が移動面Sの上方の任意位置に載置されると、移動ユニット2が受電機器の下部に移動し、給電用1次コイルを受電機器の位置に移動して給電でき、給電場所に融通性を持たせることができる。
(もっと読む)
太陽追尾装置
【課題】出力を簡易に検出できる太陽追尾装置を提供すること。
【解決手段】太陽の方位に対応して回転可能に構成される第1軸7及び太陽の高度に対応して回転可能に構成される第2軸8により、太陽光を受光する受光部9が支持されている。第1軸7は重力軸Gに対して回転軸心Oが傾斜して配置されているので、第1軸7が回転すると、第1軸7に固定された第1傾斜センサ41は重力軸Gと検出軸Dとの角度を変えながら、即ちセンサ出力を変えながら回転軸心Oの回りを回転する。第1軸7の回転角と第1傾斜センサ41のセンサ出力とを対応させることにより、出力を簡易に検出できる。第1軸7に連係して回転される第2軸8や受光部9に第1傾斜センサ41が固定されるときも同様に、出力を簡易に検出できる。
(もっと読む)
追尾装置
【課題】大きな角速度を必要とせず、全天に渡り目標の自動追尾を可能とする。
【解決手段】追尾装置は、球状胴体と、第1から第3ジンバルと、可動体と、球体駆動部と、駆動保持部と、目標位置認識部と、第1から第4角度センサと、回転バネ駆動部と、制御部と、を備えている。駆動保持部は、第3ジンバルと可動体とを接続し、球体駆動部を球状胴体に押圧した状態に保持する。目標位置認識部は、可動体に支持され、目標の位置データを出力する。第1から第3角度センサはそれぞれ、第1から第3ジンバルの第1から第3回転角度を検出する。第4角度センサは、第3ジンバルに対する可動体の第4回転角度を検出する。回転バネ駆動部は、第3ジンバルを回転中心に戻す。制御部は、位置データ、及び第1回転角度から第4回転角度までを使用して、目標を追尾するように球体駆動部を制御する。
(もっと読む)
線形運動デバイスの制御装置
【課題】検出磁場と線形運動デバイスの位置とにずれがある場合でも、線形運動デバイスを正確に位置決めすることができる線形運動デバイスの制御装置を提供する。
【解決手段】デバイス11の磁石19が発生する磁場を検出し、検出された磁場の値に応答する出力信号VMOを出力する磁場センサ113、制御信号VCM[2:0]と出力信号VMOの振幅とを関連付けた電圧指令信号VCOを生成する電圧信号生成回路114、出力信号VMOと電圧指令信号VCOとの偏差を増幅して出力信号VEOを生成する差動増幅器115、出力信号VEOの値に応じて線形運動デバイス11を駆動する出力ドライバ112と、出力信号VEOを、磁場センサ113から出力される出力信号VMOの振幅に応じて補正し、出力ドライバ112への入力信号を生成するゲイン補正回路116によって制御装置を構成する。
(もっと読む)
弁開度制御システム
【課題】開又は閉指令を、開度に対応した時間、出力することで、弁を目標開度に操作する場合、目標開度近くで開/閉方向の反転動作を頻繁に繰り返すことなく、目標開度とすることが可能な弁開度制御システムを提供する
【解決手段】弁11を所望の開度に開閉制御する弁開度制御システムであって、弁11の開閉速度に基づき、設定された所望の目標開度に達するまでの開又は閉指令の出力時間を出力時間演算手段17で求め、 この出力時間の間、出力手段と18により弁11に開又は閉指令を出力する。この際、弁11の実測開度を開度制御手段19に入力し、この実測開度と目標開度との差が、予め設定した不感帯の範囲に入ると、弁11に対する開又は閉指令の出力を停止させる。
(もっと読む)
演算ユニット、出力制御方法、およびプログラム
【課題】装置機差の微調整および電子カム動作中における従軸の動作の変更を容易に実現可能なPLCの演算ユニットを提供する。
【解決手段】PLCのCPUユニットは、モーション制御とシーケンス制御とを実行する。CPUユニットは、カムテーブルを用いたモーション制御を行なうための制御プログラムと、カムテーブルとを格納している。マイクロプロセッサは、複数の位相のうちのいずれかの位相および当該位相に対応付けられた変位の少なくともいずれかを変更するための指令を受け付けると、カムテーブルにおける当該位相および変位の少なくともいずれかを当該指令に基づいた値に変更する。マイクロプロセッサは、上記変更が行なわれると、変更された後のカムテーブルを用いて制御プログラムを実行し、当該実行結果を制御対象機器に出力する。
(もっと読む)
移動制御装置及び移動制御方法、並びにコンピューター・プログラム
【課題】マニピュレーターのリーチング動作や移動ロボットの移動など、自動機械の移動を好適に制御する。
【解決手段】自動機械の現在位置及び最終目標位置をパラメトリック曲線の端末とみなし、これら2点を結ぶパラメトリック曲線を内分比r:1−rで内分する内分点を、仮想バネ・ダンパ系の平衡点、すなわち仮目標位置として算出する。そして、この仮目標位置を2次のフィルターで鈍らせ、目標位置xdの生成を行なう。複雑な経路への追従制御が実現されるとともに、ベースとなるオンライン目標位置整形の特徴である対外乱適応能力を両立した移動制御器を構成できる。
(もっと読む)
位置制御装置
【課題】簡素な構成で可動部材の位置を高精度に検出するとともに、高精度に停止位置の制御ができる位置制御装置を提供する。
【解決手段】直流電気モータ39〜42と、電気モータによって可動部材を移動させる移動手段2と、ブラシとコミュテータとの間の断続によって電気モータへの供給電流に発生するリップル成分を抽出してパルス化したリップルパルスを出力するパルス検出部38と、可動部材が移動されるときの現在位置を示す現在位置情報をリップルパルスに基づいて演算し記憶する現在位置情報記憶部44と、電気モータ39〜42に供給される電流が0となる前に可動部材が停止するように電流を低下させる電流制御装置45と、を備える。
(もっと読む)
加工を高精度化するサーボ制御システム
【課題】角度同期方式の長所を生かしつつ、基準角度が与えられない場合でも角度同期方式の学習制御の適用を可能にするサーボ制御システムの提供。
【解決手段】サーボ制御システム10は、各軸を駆動するX軸サーボモータ12、Y軸サーボモータ14及びZ軸サーボモータ16をそれぞれ制御するX軸サーボ制御装置18、Y軸サーボ制御装置20及びZ軸サーボ制御装置22を有する。またX軸サーボ制御装置18及びY軸サーボ制御装置20は、上位制御装置24から送られる各軸指令に基づいて、単調増加又は一方向に変化する基準信号θを作成する基準信号生成部28及び32をそれぞれ有し、学習制御器26及び30は該基準信号に基づいて学習制御を行う。
(もっと読む)
太陽光発電装置
【課題】対環境性能が高く最低限の発電量を確保して発電量の低下や変動を抑えることができるとともに、大電力を確保するために多数の太陽電池モジュールを設置する必要がある場合においてもコストを抑えることができる太陽光発電装置を提供する。
【解決手段】複数の太陽電池モジュールと、複数の太陽電池モジュールが設置された場所の環境条件を測定する環境測定装置5と、環境測定装置5により測定された環境条件に基づいて、複数の太陽電池モジュールの各々がなすべき目標仰角を算出する演算装置6と、演算装置6により算出された目標仰角に基づいて、複数の太陽電池モジュールの各々の仰角を制御する方向制御装置7とを備える。
(もっと読む)
位置決め制御装置及びその方法
【課題】処理対象物の特定箇所に処理部を位置決めさせることを、コストを抑制しつつ、より簡易的に実施可能な位置決め制御装置及びその方法を提供する。
【解決手段】位置決め制御装置のコントローラ17は、可動体8の検知部9が処理対象物を検知することにより出力されるセンサ信号及びサーボモータ15の駆動に用いられるパルス信号を受信する手段と、可動体8を処理対象物の横断方向に移動させてセンサ信号が出力される間におけるパルス信号に関する情報と処理対象物のタイプとの関係を定めたテーブルを用いて、処理対象物のタイプを特定する手段と、特定した処理対象物のタイプに基づき、処理対象物のタイプと被処理部の位置との関係を定めたテーブルを用いて、処理対象物の被処理部の位置を特定する手段と、当該特定に基づくパルス列を生成してモータドライバ16に送信する手段とを有することを特徴とする。
(もっと読む)
同期制御装置
【課題】 複数のモータで同一方向の座標軸を駆動する機械に対して、汎用的な電機品を用いて各軸間相互に加わる無効反力を抑制すると共に、作業位置に対する同期制御を高精度に行なう同期制御装置を提供する。
【解決手段】 位置指令121を生成する位置指令生成部21と、2台の位置情報131,141に基づいてXY軸座標系である作業位置122を演算し、位置指令121と作業位置の一方の軸座標系位置122との差に基づいて新たな位置指令125を演算する第1の位置制御系を有する指令装置2と、新たな位置指令125と位置情報131,141との差に基づいてモータを駆動する指令を演算する第2の位置制御系をそれぞれ有する2台のモータ制御装置3,4と、を備える。
(もっと読む)
太陽発電装置
【課題】 平面に略沿った受光面を有する複数の太陽電池パネル全ての受光面を、太陽の移動に追従し太陽光の照射方向に略垂直に向けることができる簡単な構造の太陽発電装置を提供する。
【解決手段】複数の太陽電池パネルを第1直線に略平行なパネル回動軸を中心に受光面が互いに略平行な状態を保ちつつそれぞれ回動可能に支持するパネル支持手段と、パネル支持手段を固定物に対し、第1直線と交わる第2直線に略平行な支持手段回動軸を中心に回動可能に支持する回動支持手段と、複数の太陽電池パネルをパネル回動軸を中心に連動して回動させるパネル回動手段と、パネル支持手段を支持手段回動軸を中心に回動させる支持手段回動手段と、を備えてなり、支持手段回動手段によるパネル支持手段の回動と、パネル回動手段による複数の太陽電池パネルの回動と、の両回動のみにより、太陽の移動に追従し、複数の太陽電池パネル全ての受光面を太陽光の照射方向に略垂直に向けるものである、太陽発電装置である。
(もっと読む)
太陽光集光システム及び太陽光集光システムの反射鏡調整方法
【課題】稼動状態を停止させる必要なく反射鏡の向きを容易に調整することが可能な太陽光集光システム及び太陽光集光システムの反射鏡調整方法を提供する。
【解決手段】太陽光集光システム101は、地表面に設けられ、太陽光線を反射させる反射鏡と、地表面上方に配置され、反射鏡により反射された太陽光線が入射する入射部を有する受光手段と、該受光手段の入射部の外縁に、少なくとも互いに対向する二箇所に設けられた光量センサ45と、反射鏡を少なくとも一軸回りに回転自在とする回転機構52と、該回転機構52を駆動させて反射鏡を回転させながら互いに対向する光量センサ45それぞれで検出される光量を取得し、該光量に基づいて反射鏡の角度を調整する方向制御部62とを備える。
(もっと読む)
モーションコントロール装置
【課題】 システムの固有振動角周波数をωnとした場合、指令の払い出し時間がπ/ωn以下、且つ、振動を励起しない指令を容易に生成でき、更に、機械を高速に位置決めすることができる指令を生成するモーションコントロール装置を提供する。
【解決手段】 任意の第1の時間幅と正規化された振幅とを有する第1の基本波形p1と、任意の第2の時間幅と正規化された振幅とを有する第2の基本波形p2と、を発生する波形発生器1,2と、前記第1の基本波形の振幅に第1の所定ゲインA1を乗じて出力し、前記第2の基本波形の振幅に第2の所定ゲインA2を乗じて出力する振幅調整器3,4と、前記第2の所定ゲインを乗じた信号に所定遅延時間を加えて出力する遅延器6と、前記第1の所定ゲインを乗じた信号から前記遅延器の出力信号を減算する減算器5と、を備える。
(もっと読む)
ステージ装置およびその制御方法
【課題】試料と副ステージを確実に密着させても、試料を破損する危険の少ないステージ装置の制御方法を提供する。
【解決手段】試料9を載置する主基台1と、主基台1に対向配置された副基台7と、副基台7上のアクチュエータ6と、副基台7からバネで吊り下げられるアクチュエータ6によって制御される副ステージ8と、副基台7と前記副ステージ8との間の距離を計測する距離センサとを備え、試料9の厚さ方向の公差を接触時最大位置決め誤差と定義したとき、アクチュエータ6の各出力推力制限値FL[p]を、予め求めた試料が存在しない場合の各出力推力に試料9が許容する押し当て力を加えた値とするステップと、副ステージ8の位置許容偏差を副ステージ8に設定された位置許容偏差に接触時最大置決め誤差を加えた値とするステップ等の5ステップより試料9にアクチュエータ6が接触したと判断する。
(もっと読む)
位置決め制御ユニット、位置決め制御方法および位置決め制御プログラム
【課題】位置決め過程の位置精度を向上させる位置決め制御ユニット、位置決め制御方法および位置決め制御プログラムを提供する。
【解決手段】位置決め制御ユニット100は、特定の位置決め速度に基づいて1制御周期あたりの操作量を算出する操作量算出部121と、算出された操作量を出力する出力制御部123と、出力された操作量をデジタル信号からアナログ信号へ変換するD/A変換部124と、を備え、アナログ信号により圧電素子を駆動させ、位置検出を伴う閉ループでステージの位置決めを制御する。1制御周期あたりの操作量を制御することで、位置決め動作による振動を抑制することができる。その結果、位置決めの精度を向上させることができる。
(もっと読む)
XYステージ
【課題】負荷の質量や、負荷とX軸駆動部との距離が変化した場合でも、安定して機械共振および反共振を吸収できるXYステージを実現する。
【解決手段】X軸方向に移動制御される第1部材と、この第1部材上に直交して結合しY軸方向に移動制御されると共に、前記第1部材との結合位置より所定距離を隔てて負荷が搭載された第2部材よりなるXYステージにおいて、
X軸指令値に基づいて前記第1部材を移動制御するX軸制御系と、
Y軸指令値に基づいて前記第2部材を移動制御するY軸制御系と、
前記X軸フィードバック制御系に挿入され、この制御系で発生する機械共振および反共振を吸収するようにパラメータが設定されているフィルタ手段と、
を具備し、
前記フィルタ手段は、前記Y軸制御系における前記負荷の情報を取得し、前記パラメータの設定値を更新する動的パラメータ設定部を備える。
(もっと読む)
1 - 20 / 78
[ Back to top ]