
Fターム[5H309CC09]の内容
非電気的変量(レベル、濃度等)の制御 (519) | 被制御変量の種類 (68) | プロセス変量 (59) | レベル、液位 (26)
Fターム[5H309CC09]に分類される特許
1 - 20 / 26
液位制御システム
【課題】 水位検出器の出力値調節作業が容易であり、かつ、精度の高い液位の制御が可能な液位制御システムを提供する。
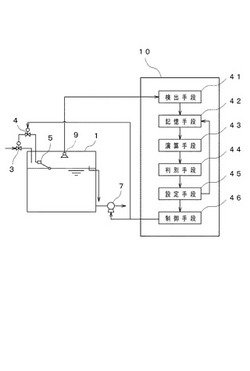
【解決手段】 下限水位と上限水位とに対する、水位検出器9からの各検出値と基準液位に対応する液比率とは、記憶手段42にて記憶されている。そして、水槽1における制御すべき制御水位に対応する水位検出器9からの特定検出値は、検出手段41に送られ、記憶手段42にて記憶された後、演算手段43に送られ、下限水位と上限水位との相関関係に対応した液比率に演算される。演算された特定検出値に基づく液比率は、判別手段44にて各設定水位と水位制御アルゴリズムに基づいて比較判別され、設定手段45を経て、制御手段46から電磁弁4及び送水ポンプ7の各構成機器に制御信号を送り、水槽1内の水の貯留及び供給を制御する。
(もっと読む)
汚水流入量算出方法及び汚水流入量算出装置

【課題】汚水の揚水量が大きく変化した場合であっても汚水流入量を正確に算出すること。
【解決手段】制御装置10が、所定時間毎の汚水揚水量Q0の積算値を利用して導出された所定時間毎の汚水流入量Qiの変化を示す1次関数を利用して任意の時間tにおける汚水流入量Qi1を算出し、任意の時間tにおける汚水揚水量Q0と汚水4の水位Lとを利用して任意の時間における汚水流入量Qi2を算出し、算出された汚水流入量Qi1と汚水流入量Qi2との重み付け和を任意の時間tにおける汚水流入量Qiとして算出する。これにより、汚水4の揚水量が大きく変化した場合であっても汚水流入量Qiを正確に算出することができる。
(もっと読む)
液面制御装置及び液面制御方法
【課題】より精度の高い液面制御が可能となり、無駄な調整を低減することができる液面制御装置及び液面制御方法を提供する。
【解決手段】液が貯留される容器20と、供給路10と、払い出し路30と、供給路10及び払い出し路30の流量を調節するコントロール弁12及び払い出しポンプ32と、容器20の液面がH,Lに達しているかを検知するレベルスイッチ20H,20Lとを備える液面制御装置1において、制御部40が、レベルスイッチ20H,20Lの検知結果から供給量と排出量との差であるΔWを演算し、ΔWが0に収束するように供給路10及び払い出し路30の流量を調節することにより、容器20の液面の高さを制御する。このため、供給量及び排出量の変化等の外乱に対する追従性がより良く、より精度の高い液面制御が可能となり、無駄な調整を低減することができる。
(もっと読む)
加湿チャンバ用フロート
【課題】加湿チャンバのための改良されたフロートを提供する。
【解決手段】加湿チャンバ10用のフロート62は、熱可塑性エラストマ材料をフロートにオーバーモールドすることによって適所に形成された順応性を有する封止部90を有する。フロートは、フロートの浮力によって規定された水位より上方であるとともに、充填されているときの加湿チャンバ内の水位よりも上方の高さにおいて互いに封止状態に結合されたセクションを備える。
(もっと読む)
水位制御装置および水位制御方法
【課題】下流側ダムの水位のハンチングを抑えつつ、目標とする水位に安定させることができる水位制御装置および水位制御方法を提供する。
【解決手段】下流側ダム3に貯留された水の水位と、上流側ダム2の発電機2Gの出力とを監視して前記下流側ダム3の水位を制御する水位制御装置4であって、前記水位制御装置4は、前記発電機2Gの目標出力Pmを演算する目標出力演算部41と、前記目標出力演算部41で演算された前記目標出力Pmに基づいて、前記発電機2Gの出力を調整する発電機出力調整部42と、前記発電機2Gの出力を記憶する記憶部44と、を備え、前記目標出力演算部41は、前記下流側ダム3の現在水位Hbと、前記記憶部44に記憶された前記発電機2Gの過去の出力とに基づいて、前記目標出力Pmを演算する。
(もっと読む)
配水池浄水供給システムの浄水供給量算出方法およびそのプログラム、配水池浄水供給システム
【課題】配水池への予め設定された流入量の変動許容幅を守った上で流入量の変動回数を最小限に抑えた準最適な流入量を求める。
【解決手段】本発明の配水池浄水供給システムSの浄水供給量算出方法は、配水池1319への流入量の計画方法として、ある時刻の流入量が変動無く維持できる期間において、流入量を変動できる全ての時刻で流入量の変動を試み、その変動後の流入量が最も未来まで維持できるものを採用することにより、変動回数を最小限に抑えた配水池1319への流入量を算出し、その流入量を目標値の流入量設定値として配水池1319への流入量を制御する。
(もっと読む)
脈動軽減装置及び検査装置
【課題】ポンプを用いて基台内を循環させる液体を貯留するタンク内の液面が変化してもタンク内の液面を一定の範囲に維持してポンプに起因する脈動を常に確実且つ安定的に軽減することができる脈動軽減装置及び検査装置を提供する。
【解決手段】本発明の脈動軽減装置16は、循環配管12に接続されて空間部を残して冷媒を貯留する第2タンク16Aと、第2タンク16A内の冷媒の液面を検出する第1、第2液面センサ16B、16Cと、第1、第2液面センサ16B、16Cに電気的に接続され且つこれらのセンサ16B、16Cからの検出信号に基づいて作動する空気制御装置16Dと、を備え、第2タンク16Aの空間部を満たす空気等の気体がポンプ13から冷媒を吐出する際の脈動を軽減する緩衝体として働くように構成されている。
(もっと読む)
連続鋳造機のモールド湯面レベル制御装置および制御方法
【課題】非定常バルジングの変動周期を高精度に同定し、制御設定パラメータを安定的に自動供給可能な連続鋳造機のモールド湯面レベル制御装置を提供する。
【解決手段】モールド湯面レベル制御装置は、注湯手段の開度を調節する開度制御部と、金属溶湯をモールドに注湯する際の外乱量推定値を算出する外乱推定部と、外乱量推定値と鋳造速度とを取得するデータ取得部と、外乱量推定値の時系列データを鋳造長に基づくデータに変換して、当該データをオーバーサンプリングしてオーバーサンプリング後データを生成するオーバーサンプリング部と、オーバーサンプリング後データについてFFT解析を行い、非定常バルジング発生ロールピッチの距離周波数スペクトルを算出するFFT処理部と、距離周波数スペクトルのピークを検出して非定常バルジング発生ロールピッチを算出し非定常バルジングの変動周期を算出するピーク検出部と、を備える。
(もっと読む)
給水装置及び液位制御装置
【課題】電極の本数に関わらず設置可能で安価な給水装置を提供する。
【解決手段】受水槽4の水を需要側に供給するポンプ7−1,7−2と、受水槽の液位を検出する液位検出手段3−1,3−2と、を備えた給水装置において、液位検出手段が検出する液位の数に応じた複数の液位制御パターンを記憶する記憶部と、記憶部に記憶された液位制御パターンを決定する決定手段と、決定手段に応じて決定した液位制御パターンと液位検出手段により検出された液位に応じて前記ポンプを回転駆動するポンプ制御手段とを備えた。
(もっと読む)
貯水位情報処理装置及びプログラム
【課題】貯水位の変化の時期を適切に判定すること。
【解決手段】貯水池の貯水位を計測する水位計より入力される計測値に基づいて前記貯水位の変化を検出する貯水位変化検出手段と、前記貯水位変化検出手段によって検出された前記貯水位の変化の継続時間を計測する継続時間計測手段と、第一の貯水位から第二の貯水位、前記第二の貯水位から第三の貯水位へと一定方向に貯水位が変化する過程において、前記第一の貯水位から前記第二の貯水位へ変化し再び前記第一の貯水位へ戻るまでの前記継続時間の中の最大値を貯水位変化確定時間に設定し、前記第三の貯水位の継続時間が前記貯水位変化確定時間に達した時を前記第三の貯水位への変化時とする貯水位変化時期判定手段とを有する。
(もっと読む)
液位制御システム
【課題】 水位検出器の出力値調節作業が容易であり、かつ、精度の高い液位の制御が可能な液位制御システムを提供する。
【解決手段】 下限水位と上限水位とに対する、水位検出器9からの各検出値と基準液位に対応する液比率とは、記憶手段42にて記憶されている。そして、水槽1における制御すべき制御水位に対応する水位検出器9からの特定検出値は、検出手段41に送られ、記憶手段42にて記憶された後、演算手段43に送られ、下限水位と上限水位との相関関係に対応した液比率に演算される。演算された特定検出値に基づく液比率は、判別手段44にて各設定水位と水位制御アルゴリズムに基づいて比較判別され、設定手段45を経て、制御手段46から電磁弁4及び送水ポンプ7の各構成機器に制御信号を送り、水槽1内の水の貯留及び供給を制御する。
(もっと読む)
鋳型内の湯面定在波変動検出方法、湯面定在波制御方法、湯面レベル制御方法および連続鋳造方法
【課題】1つの湯面レベルセンサーから得られる湯面変動から高精度に定在波変動分と体積変動分とを分離し、湯面定在波・湯面レベルを制御する、鋳型内の湯面定在波変動検出方法、湯面定在波制御方法、湯面レベル制御方法および連続鋳造方法を提供することを目的とする。
【解決手段】連続鋳造機の鋳型内の所定位置における湯面レベル変動の定在波変動分の定在波周波数を、鋳型幅から算出し、その周波数で定在波をsin関数とcos関数で記述して、その記述された定在波の係数を測定した湯面レベル変動からオンライン推定することにより、定在波変動分を求める。
(もっと読む)
液位制御システム
【課題】 水位検出器の出力値調節作業が容易であり、かつ、精度の高い液位の制御が可能な液位制御システムを提供する。
【解決手段】 下限水位と上限水位とに対する、水位検出器9からの各検出値と基準液位に対応する液比率とは、記憶手段42にて記憶されている。そして、水槽1における制御すべき制御水位に対応する水位検出器9からの特定検出値は、検出手段41に送られ、記憶手段42にて記憶された後、演算手段43に送られ、下限水位と上限水位との相関関係に対応した液比率に演算される。演算された特定検出値に基づく液比率は、判別手段44にて各設定水位と水位制御アルゴリズムに基づいて比較判別され、設定手段45を経て、制御手段46から電磁弁4及び送水ポンプ7の各構成機器に制御信号を送り、水槽1内の水の貯留及び供給を制御する。
(もっと読む)
水処理供給システム
【課題】水処理装置が詰まったりして下流に水を供給できなくなっても、水使用機器の給水タンクを空にすることなく給水することが可能な水処理供給システムを提供する。
【解決手段】本実施形態に係る水処理供給システム10は、給水ライン4と、脱気装置11と、軟水装置12と、給水タンク5内の水位を測定する水位センサ15と、第1バイパスライン16と、第2バイパスライン17と、開閉弁20,21と、制御回路25と、を備えている。制御回路25は、水位センサ15の出力により、給水タンク5内の水位が第1バイパス給水開始水位B1まで下がると、第1バイパスライン16の開閉弁20を開けて第1バイパス給水を開始するよう制御し、給水タンク5内の水位が第2バイパス給水開始水位B2まで下がると、第2バイパスライン17の開閉弁21を開けて第2バイパス給水を開始するよう制御する。
(もっと読む)
液位制御システム
【課題】 アナログ出力式水位センサの劣化による水位制御の不具合を解決すること。
【解決手段】 水位制御システムであって、特定の高水位および低水位を検出する第一水位センサ16B,16Cと、連続的に水位を検出する第二水位センサ16Aとから構成される水位センサ16と、第一水位センサ16B,16Cが高水位および低水位を検出した時の第二水位センサ16Aの水位検出結果の差が設定値以下の時、第二水位センサ16Aが異常と判定し、第二水位センサ16Aによる水位制御を中止する制御器17とを備える。
(もっと読む)
ハンダ液面制御装置およびハンダ液面制御方法
【課題】 ハンダの不足量の供給が迅速に行えると共に使い勝手に優れるハンダ液面制御装置を提供する。
【解決手段】 検出回路に接続された対の電極16を昇降操作自在に備える。昇降操作する駆動源がサーボモータ25とされる。サーボモータ25を駆動制御するためのエンコーダ24を監視し、電極16の下降時におけるハンダ槽17の液面に接触した際の導通の検出により、その導通を検出した際のエンコーダ24の値からハンダ槽17の液面高さを検出し、予め設定入力された設定液面高さと検出された液面高さとの差を求め、この差に対応する量のハンダ18をハンダ供給手段26によりハンダ槽17に供給する制御部20を備える。
(もっと読む)
非接触式水位制御装置
水位制御装置は、水を貯蔵するタンク側壁の外側面に取り付けられた少なくと1つの静電容量センサを含み、前記タンク内に貯蔵された水の水位が、前記静電容量センサが取り付けられた位置にあるか否かにより、静電容量の変化を検出しており、さらに、前記静電容量センサにより検出された静電容量の変化によって前記タンクに供給される水量を制御するコントローラとを含んでいる。 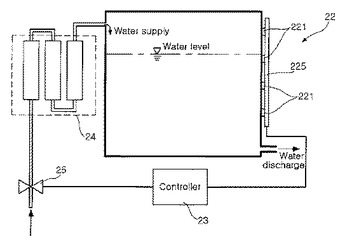 (もっと読む)
(もっと読む)
排水処理装置
【課題】複数の装置から排水される液体を効率良く回収して処理する排水処理装置を提供する。
【解決手段】排水処理装置100は、排水蓄積部10と、水位検出部11と、吸引排水蓄積部20と、低圧力生成部30と、吸引配管41および42と、排水吸引制御部50と、排水処理制御部60と、排水処理配管70とを備える。排水蓄積部10に蓄積される装置200から排水された液体が所定の水位に達すると、水位検出部11においてそのことが検出される。その水位検出部11における検出結果は排水吸引制御部50に供給され、排水吸引制御部50は排水蓄積部10に蓄積された液体を吸引排水蓄積部20に吸引配管41を通じて吸引させて蓄積させる。なお、吸引排水蓄積部20内の圧力は、低圧力生成部30により所定圧力以下の圧力にされているため、吸引配管41の端部付近の液体等を吸引できる。
(もっと読む)
プロセスの制御装置および制御方法
【課題】複数の制御因子を有するプロセスの、プロセス条件を一定範囲に制御するための制御因子のうち、逆方向の効果をもたらす少なくとも2つの制御因子の制御が切り替わる境界におけるハンチングによる不必要なロスを低減でき、かつ、不感帯による制御の不安定を回避できるという優れたプロセスの制御装置および制御方法を提供する。
【解決手段】(1)プロセス条件を一定範囲に制御するための制御因子のうち、逆方向の効果をもたらす少なくとも2つの制御因子に対して独立して制御する手段を含むことを特徴とするプロセス制御装置。(2)プロセス条件を一定範囲に制御するための制御因子のうち、逆方向の効果をもたらす少なくとも2つの制御因子に対して独立して制御する手段を設置して、一定の制御範囲内で少なくとも2個以上の設定値を設定し、制御することを特徴とするプロセス制御方法。
(もっと読む)
連続鋳造機におけるモールド内湯面レベル制御方法
【課題】バルジング発生箇所が変化する場合でも、バルジング周波数を、リアルタイムに、正確に検出し、時々刻々と変化するバルジング性湯面変動をも低減する。
【解決手段】湯面レベルの目標値と検出値との偏差に基づいて、モールド(10)内に流入する溶融金属(4)の流量調節をするPI制御(20)と、バルジング性湯面変動の周波数に基づいて外乱補償器(22)の設定周波数を決定し前記変動に対する外乱補償する制御と、を行う連続鋳造機モールド内湯面制御方法において、前記モールド10から凝固しつつある溶融金属(4)を引き抜くピンチロール12の制御電流を複数箇所で測定し(S2、30)、該電流の変動が最も大きいピンチロール12の箇所をバルジング発生箇所として検出し(S3)、前記バルジング発生箇所のピンチロール12の間隔とピンチロールの速度との比からバルジング性湯面変動の周波数を算出し(S4、32)、前記外乱補償器(22)の設定周波数を決定する(S5)ことを特徴とする連続鋳造機モールド内湯面制御方法。
(もっと読む)
1 - 20 / 26
[ Back to top ]