
Fターム[5H501BB00]の内容
電動機の制御一般 (20,975) | 目的 (1,961)
Fターム[5H501BB00]の下位に属するFターム
高力率化 (8)
効率化 (100)
省エネ化 (56)
小型化 (118)
騒音、振動を低減するもの (274)
電気ノイズを低減するもの (60)
耐環境性 (45)
高信頼性 (558)
保守、試験 (124)
特性改善をするもの (272)
その他 (342)
Fターム[5H501BB00]に分類される特許
1 - 4 / 4
サーボ制御装置
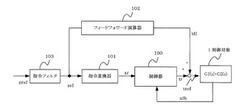
【課題】実際の応答を見ながら複数の演算器のうち最適な構成を選択し、最短時間応答や最小オーバシュートを実現するサーボ制御装置を提供する。
【解決手段】指令にフィルタ処理をする指令フィルタ(103)と、フィルタ処理後の指令を変換し新たな指令を生成する指令変換器(101)と、フィルタ処理後の指令からフィードフォワードトルク指令を生成するフィードフォワード演算器(102)と、を備え、指令変換器は、制御対象のトルク指令から検出値までを近似した伝達関数モデルの特性の一部の特性を演算する演算器を複数備えており、複数の演算器の出力を選択するスイッチを備え、前記フィードフォワード演算器は、制御対象のトルク指令から検出値までを近似した伝達関数モデルの特性の一部の逆特性を演算する演算器を複数備えており、複数の演算器の出力を選択できるスイッチを備えた。
(もっと読む)
同期型ACサーボモータおよびその制御システム

【課題】一つの同期型ACサーボモータに複数の固定子巻線系統を独立して設け、これらの各固定子巻線系統に対して、独立した複数の同期型ACサーボモータの同期駆動と同様の駆動システムを構築する。
【解決手段】1つの回転子26に対して、電気的に独立した固定子巻線系統28、29を複数設けるとともに、回転子26の軸に単一のシリアル通信型位置検出器34を取り付けた同期型ACサーボモータを用い、それぞれ各固定巻線系統の位置制御、速度制御、電流制御を行う複数のサーボ制御回路と、前記各サーボ制御回路を同期して動作させる同期手段と、複数の前記サーボ制御回路のうち、特定の一のサーボ制御回路からのリクエスト信号に応答した前記シリアル通信型位置検出器から同時刻の位置情報を前記各サーボ制御回路に分配する分配器と、から制御システムを構成する。
(もっと読む)
モータ制御装置
【課題】 上位指令装置を必要とせず、毎回同じ開始位置から所定の運転パターンに従ってモータを駆動制御することを可能としたモータ制御装置を提供する。
【解決手段】 トルク指令を出力することによりモータを駆動制御するモータ制御装置であって、指令パターン生成部112により生成された位置指令によって位置制御を開始するに際して、その開始点となる基準位置を設定し、現在位置から基準位置へ移動するための基準位置指令生成部116を備え、基準位置指令生成部116によって求められた基準位置指令に基づいて、現在位置から基準位置への移動が完了した後に、指令パターン生成部112による位置指令に切り替えて位置制御を開始する。
(もっと読む)
アクチュエータの角度伝達誤差補償方法
【課題】波動歯車減速機を備えたアクチュエータの角度伝達誤差に含まれている非線形弾性変形成分を効果的に抑制可能な補償方法を提案すること。
【解決手段】波動歯車減速機付きアクチュエータの角度伝達誤差に含まれる非線形弾性変形成分は、モータ軸の回転方向が変化した際に、可撓性外歯歯車の弾性変形により発生する角度伝達誤差の成分であるので、モータを正弦波状に駆動し解析を行うことができる。この解析結果から得られた非線形弾性変形成分モデル(非線形モデル)を用いて、モータ制御装置内にその補償のための関数あるいはデータを記憶させ、非線形弾性変形成分補償(θHys)をフィードフォワード補償用の補償入力(Nθ*TE)として、モータ軸角度指令(θ*M)に加える。この結果、非線形弾性変形成分(θHys)を効果的に低減でき、アクチュエータの位置決め精度を向上させることができる。
(もっと読む)
1 - 4 / 4
[ Back to top ]