
Fターム[5H501BB20]の内容
Fターム[5H501BB20]に分類される特許
1 - 20 / 342
電力変換装置
アクチュエータ制御装置及び方法
モータ駆動制御装置及び集積回路装置
モータ制御装置、歩行補助装置及びモータ制御方法
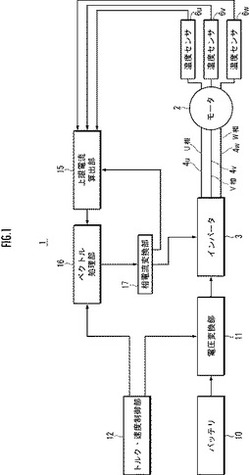
【課題】モータコイルの過熱を防止するモータ制御装置において、コイル温度が上限を超えないことを保証しつつ、コイル温度の上限を保証上限温度に十分近い値に設定して、コイル電流の制限に因るモータ性能の低下を抑止する。
【解決手段】上限電流算出部15は、温度センサ6u,6v,6wが検出した各相コイルの温度に基づいて各相において第1の所定時間後のコイル温度が上限温度以下に留まる上限値を、第1の所定時間より短い第2の所定時間の経過ごとに算出する。ベクトル処理部16は、目標コイル電流に対応する目標ベクトルの長さを、上限電流算出部15が算出した各相の上限値の内の最小のものに対応する長さ以内になるように補正する。相電流変換部17は、補正後の目標ベクトルに基づいて各相電流値を算出し、インバータ3を介してモータ2の各相電流を制御する。
(もっと読む)
球面モータの制御装置および球面モータの制御方法

【課題】3自由度以上の回転が可能な球面モータの動作制御を直感的に把握し易い状態で行う。
【解決手段】任意の方向に回転が可能な概球回転体の運動に係る信号出力に基づき、球面モータ300のロータを動作させるために、球面モータ300の界磁コイル309への通電パターンを生成する界磁コイル通電パターン生成部201と、前記通電パターンに基づく駆動信号を出力する駆動信号出力部202とを備える。
(もっと読む)
モータ制御装置及び画像形成装置
【課題】高速且つ高精度に駆動対象を目標位置に停止可能とする。
【解決手段】モータ制御ユニットは、モータに入力可能な電流上限値を推定し、この上限値に対応する駆動電流でモータを駆動する第一制御処理(S140,S150)を実行する。また、第二制御処理(S210,S220)では、電流上限値よりも小さい偽の電流上限値を、電流上限値の算出式に用いる係数を切り替えることで算出し、その偽の電流上限値に対応する駆動電流でモータを駆動する。そして、第三制御処理(S300)では、第二制御処理終了時の駆動対象の位置P及び速度Vに基づき、定速区間及び減速区間の目標プロファイルを設定し、駆動対象の位置及び速度が、目標プロファイルが示す位置及び速度を追従するように、モータに対する電流指令値を調整する。これによって第三制御処理の初期に電流指令値が電流上限値を超えないようにモータ制御を実行し、駆動対象を目標位置に停止させる。
(もっと読む)
負荷駆動装置
【課題】負荷電流検出手段により検出された負荷電流を用いてリーク故障を確実に検出する。
【解決手段】駆動回路33a、33bの出力端子Ta2、Tb2から電源線6に至る還流経路内にシャント抵抗9a、9bを接続し、電源線5と給電分岐点Nsとの間に共通のシャント抵抗24を接続する。駆動制御回路32は、MOSFET7a、7bをPWM駆動し、負荷電流検出回路12a、12bから負荷電流Ia、Ibを入力し、総電流検出回路23から総電流Isを入力する。検出負荷電流Ia、Ibに対しそれぞれ対応するPWM駆動信号のオフ駆動期間をマスク処理し、マスク処理した検出負荷電流Iam、Ibmを加算した加算電流Icmと検出総電流Isとを比較する。両者が等しい場合には正常状態と判定し、異なる場合にはショート故障またはリーク故障が生じたと判定する。
(もっと読む)
負荷制御システムおよび負荷駆動システム
【課題】負荷駆動のためのアクチュエータ等の負荷駆動要素を複数制御する場合、その制御システム構築が容易となる負荷制御システムを提供する。
【解決手段】負荷駆動のための複数の負荷駆動要素のそれぞれを駆動制御するために、該複数の負荷駆動要素に対応して設けられる複数のドライバを含む負荷制御システムであって、複数のドライバのそれぞれは、自ドライバに直接関連付けられた負荷駆動要素を制御する制御部を有する。そして、複数のドライバのそれぞれは、負荷制御システムにおいて、自ドライバの制御部から該自ドライバを除く他のドライバの全部または一部の対象ドライバの制御部に対して、該対象ドライバに直接関連付けられた負荷駆動要素の駆動制御を行うための指令信号の送信が可能となる相互制御通信状態が形成されるように、互いに電気的に接続される。
(もっと読む)
負荷駆動装置
【課題】駆動電流を制御するスイッチ素子をより高い周波数で動作させることができ、且つ駆動電流の異常をより正確且つ安定的に検出することが可能な負荷駆動装置を提供する。
【解決手段】負荷駆動装置1は、スイッチ素子T1に対してオン信号を周期的に出力し、且つ各周期におけるオン信号の出力期間の長さを所定の変動範囲内で変更するように制御を行う信号制御回路と、通電路における駆動電流の状態を検出する検出回路と、検出回路によって検出される駆動電流の状態に基づいて異常判定を行う異常判定回路と、異常判定回路によって異常と判定されることを条件として駆動電流を抑制する保護動作を行う保護回路とを備えている。そして、異常判定回路は、信号制御回路により、オン信号の出力期間の長さが変動範囲における最小長さよりも長い所定長さに設定されるときに、検出回路の検出結果に基づいて異常判定を行っている。
(もっと読む)
回転機装置
【課題】SRモータ1の出力の増加が可能な回転機装置を提供する。
【解決手段】ステータコア3の半径方向の一方における各ステータティース2を相巻線A、B、CによりN極に励磁し、その範囲をN極励磁範囲Nとする。また、ステータコア3の半径方向の他方における各ステータティース2を相巻線A、B、CによりS極に励磁し、その範囲をS極励磁範囲Sとする。さらに、相巻線A、B、Cとは別にアシスト巻線αを設け、アシスト巻線αによってN極励磁範囲NをN極に励磁するとともに、S極励磁範囲SをS極に励磁する。このアシスト巻線αの励磁によって、各ステータティース2の磁束量を増加させることができるため、SRモータ1の出力を増加させることができる。
(もっと読む)
燃焼装置
【課題】設置条件によるファンの負荷の相違に応じて、目標燃焼量に対するファンの回転速度の補正条件を精度良く設定する燃焼装置を提供する。
【解決手段】ガス給湯装置1に電源が投入されたときに、バーナ2への燃料供給を停止した状態でファン4を負荷検出用回転速度で作動させ、負荷検出用回転速度でファン4が作動しているときの電流検出部51による検出電流と、負荷検出用回転速度に対応する基準電流ラインでの通電電流である基準電流との相違度合に応じて、基準電流ラインを補正する基準電流ライン補正部55を備える。
(もっと読む)
故障情報伝達装置、およびモータ装置
【課題】簡易に故障状態を知らせることができる故障情報伝達装置、およびモータ装置を提供する。
【解決手段】故障情報伝達装置は、モータおよびモータ駆動装置の少なくとも一方が故障したとき、その故障の種類を伝達する。故障情報伝達装置は、故障が発生したとき、非正弦波形からなる故障識別信号3aを伝達する伝達部を備え、伝達部は、非正弦波形中の波の数、および非正弦波形の休止期間の少なくとも一方を、故障の種類に応じて異ならせる。
(もっと読む)
車両用駆動制御装置
【課題】駆動系の機械共振を適切に抑制する。
【解決手段】アクセル開度および速度に基づく要求駆動力に応じて走行用モータに対するトルク指令を出力するトルク指令生成部41と、トルク伝達系の固有振動周波数成分を減衰させるようにして、トルク指令に減衰フィルタ処理を行なって処理後のトルク指令を出力するトルク指令ノッチフィルタ42と、処理後のトルク指令に応じたトルクを発生させるように走行用モータを制御する動力指示部と、調整パラメータ演算部43とを備え、調整パラメータ演算部43は、走行用モータの回転数が所定回転数以下かつトルクが所定トルク以上である場合にトルク指令ノッチフィルタ42の減衰フィルタ処理の減衰特性を同定する。
(もっと読む)
電動モータスタータ部品の組立
【課題】部品の手作業による組立は、組立コストを著しく増加させ得る。
【解決手段】回路部品のトップダウンアセンブリによって、自動化を増大させ、かつアセンブリを減少させることを可能し、回路部品のロボットによる配置、接続および固定を可能にする、電動モータスタータ300接続パッケージのアッセンブリのシステムおよび方法を含む。接続パッケージは、1つのユニットとしてパッケージされた、電動モータスタータと、任意の過負荷プロテクタを含む。モータスタータは、トライアック、変流器、正温度係数(PTC)素子、抵抗およびコンデンサを有する電気回路を含むことができる。接続パッケージのカバー400およびベース200は、回路基板もしくは充填材料を必要とすることなく、接続された回路素子を囲い、しっかりと固定する。この装置設計は、ハウジングによって包囲された後に、モータスタータ回路および回路素子の迅速なテストを可能にする。
(もっと読む)
色素増感太陽電池を使用したモーター回路
【課題】本発明の目的は、色素増感太陽電池を使用し、屋内のような低照度条件でも、所望の間隔でモーターを駆動させることができるモーター回路を提供することにある。
【解決手段】モーター回路10は、光電変換をおこなう色素増感太陽電池12、発電された電力を蓄電するキャパシタC1、モーターM、および発光を制御する制御回路14を備える。キャパシタC1の内部抵抗が小さいことが好ましい。モーターMにファンを取り付け、ファンを回転させることができる。
(もっと読む)
電気自動車のモータ制御装置
【課題】車両統合制御ユニットから運転指令を受けられなくなったとしても、車両を安全な状態へ移行して危険を回避できるモータ制御装置を提供すること。
【解決手段】車両各部の情報を集約する車両統合制御ユニット(100)から運転指令を受けてモータ制御する電気自動車のモータ制御装置(10)において、モータ制御が継続できない状態であるか否かを自己判定し、モータ制御を継続できない状態であると判定した場合にモータ(110)を異常停止させるための異常停止モードに切換えるモード切換え機能部(11a)と、モード切換え機能部(11a)によって動作モードが異常停止モードに切換えられると、段階的にトルク制限が厳しくなるようにトルク制限するトルク制限機能部(11b)と、を具備したことを特徴とする。
(もっと読む)
回転力発生装置
【課題】全節巻型リラクタンスモータから大きな出力トルクを得ることができる回転力発生装置を提供する。
【解決手段】先に通電を開始した「先通電コイル」の通電期間中に、異なる相の「後通電コイル」の通電を開始する際、制御装置は「先通電コイル」の供給電流を一時低下させ、その直後に「後通電コイル」の通電開始とともに「先通電コイル」の供給電流を増加させる。「先通電コイル」の供給電流を一時低下させることにより「後通電コイル」の通電開始時における相互インダクタンスの影響を抑えることができ、「後通電コイル」の通電開始時において「先通電コイル」と「後通電コイル」の両方へ多くの電流を流すことができる。その結果、特に中高速回転域において全節巻型リラクタンスモータの出力トルクを増大させることができる。
(もっと読む)
制御装置及び撮像装置及びその制御方法
【課題】PWM駆動制御による出力不感帯においても、フィードバック制御を正確に行うことができ、手ぶれ補正処理の精度向上をより一層図ることのできる撮像装置を提供する。
【解決手段】本発明の撮像装置は、撮像素子101を有して撮影光軸に直交する方向にモータにより可動される可動部1251と、撮像素子の位置を検出値として検出する位置検出部1252と、手ぶれによる撮像装置本体の振れ量に対応する目標値を検出する目標値算出部1241と、PWM駆動制御を用いてフィードバック制御を行うために検出値と目標値との差を演算してデューティ比を求める演算部1043と、モータ1255にデューティ比に応じた電流を流すことにより可動部1251を駆動する駆動部1254とを有する。演算部1043には、検出値と目標値との差により求められたデューティ比を補正することにより出力不感帯を除去する補正部1043Hが設けられている。
(もっと読む)
モーター駆動方法、モーター駆動装置およびロボット
【課題】ロボットアームなどの被駆動部を高速で動作させることができるモーターの駆動方法、駆動装置およびロボットを提供する。
【解決手段】モーターの駆動トルク計測データと回転数計測データと、を取得する駆動データ取得工程と、前記駆動トルク計測データと前記回転数計測データと、を前記モーターの回転数/トルク特性テーブルと比較する比較工程と、前記比較工程の比較結果において、前記駆動トルク計測データと前記回転数計測データとが、前記回転数/トルク特性テーブルの駆動可能領域境界にある場合、前記モーターの駆動電圧を昇圧させる昇電圧工程と、を備えるモーター駆動方法。
(もっと読む)
モータ駆動装置
【課題】速度制御から位置制御への切替をシームレスに行い、機械伝達系に衝撃を与えないモータ駆動装置を提供する。
【解決手段】モータ駆動装置から前記上位コントローラ1への伝送遅れ時間の間のモータ移動量と、前記上位コントローラからモータ駆動装置への伝送遅れ時間の間のモータ移動量と、前記上位コントローラ1からモータ駆動装置への伝送遅れ時間の間のモータ移動量とを現在位置35に加算して前期の速度制御時指令位置37とし、速度制御から位置制御への切替時において、前回の前記速度制御時速度指令28から算出される位置偏差量を位置偏差24の初期値とするとともに、前記位置指令生成手段2において、前記位置偏差量を現在位置35に加算したものを位置制御時指令位置36の初期値として設定した後、前記目標位置指令21による位置制御を行うモータ駆動装置である。
(もっと読む)
1 - 20 / 342
[ Back to top ]