
Fターム[5H501GG01]の内容
Fターム[5H501GG01]の下位に属するFターム
負荷検出値をフィードバックするもの (74)
Fターム[5H501GG01]に分類される特許
1 - 20 / 472
モータ制御装置
モータ制御装置
電動機制御装置
電動機の位置制御装置
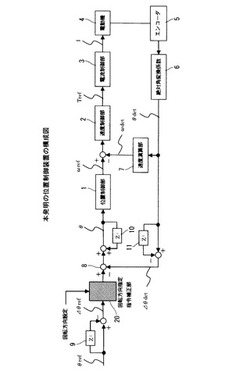
【課題】位置指令と位置検出の差演算に基づいて位置制御すると、任意の回転方向を指定しての位置制御ができず、また検出器の分解能によっては安定に位置制御ができない。
【解決手段】位置指令と1サンプリング分遅延させた信号との偏差信号を求め、この偏差信号と回転方向を設定する信号を入力して回転方向に対応して補正された信号を出力する回転方向指定指令補正部を設ける。回転方向指定指令補正
部により補正された信号と位置検出との偏差信号を求めて位置制御信号とする。
また、位置検出器の出力側に位置座標系変換部を設けることで、任意の座標系で位置制御を可能とする。さらに、分解能補正処理部を設けることにより安定性を向上することを可能としたものである。
(もっと読む)
モーター制御装置、ロボットハンド、ロボット及びモーター制御方法

【課題】回転軸の速度制御をしながらトルク限定値を超えないトルクで回転させるモーターの制御装置を提供する。
【解決手段】モーター5の回転軸5aの回転状況を検出する回転検出器19が出力する角度データ信号24及び回転速度信号29を用いてモーター5を制御する。回転軸5aの速度指令27と回転速度信号29とを用いて回転軸5aの回転速度と速度指令27との差に対応するトルク指令信号37を出力する速度制御部31と、回転軸5aに加えるトルクの最大値を示すトルク限定値を設定する限定値設定部46と、トルク指令信号37により駆動される回転軸5aのトルクをトルク限定値以下に制限するトルク限定制御部38と、を備える。
(もっと読む)
異常検出装置
【課題】 サーボモータによって駆動される被駆動部の異常部位を特定可能な異常検出装置を提供する。
【解決手段】 本発明の異常検出装置は、サーボモータの位置情報が位置検出器から入力される入力部と、位置情報を周波数変換する周波数変換部と、周波数変換された所定周波数における振幅と被駆動部の異常を判定する閾値とを比較する比較判定部と、を有し、比較判定部は、所定周波数における振幅が被駆動部の異常を判定する閾値以上となる周波数から被駆動部の異常部位を特定する。
(もっと読む)
モータ制御装置、及びモータ制御方法
【課題】コアを有するモータを制御する際の位置決め精度を向上させるモータ制御装置、及びモータ制御方法を提供する。
【解決手段】コイルが巻回されたコアを有するモータを制御するモータ制御装置は、前記モータの可動子の位置から電気角を算出する電気角算出部と、前記電気角算出部が算出した電気角に応じた制御ゲインを用いて、前記モータの駆動を制御する制御部とを具備する。
(もっと読む)
モータ制御装置及び画像形成装置
【課題】高速且つ高精度に駆動対象を目標位置に停止可能とする。
【解決手段】モータ制御ユニットは、モータに入力可能な電流上限値を推定し、この上限値に対応する駆動電流でモータを駆動する第一制御処理(S140,S150)を実行する。また、第二制御処理(S210,S220)では、電流上限値よりも小さい偽の電流上限値を、電流上限値の算出式に用いる係数を切り替えることで算出し、その偽の電流上限値に対応する駆動電流でモータを駆動する。そして、第三制御処理(S300)では、第二制御処理終了時の駆動対象の位置P及び速度Vに基づき、定速区間及び減速区間の目標プロファイルを設定し、駆動対象の位置及び速度が、目標プロファイルが示す位置及び速度を追従するように、モータに対する電流指令値を調整する。これによって第三制御処理の初期に電流指令値が電流上限値を超えないようにモータ制御を実行し、駆動対象を目標位置に停止させる。
(もっと読む)
主軸駆動用モータの制御装置
【課題】主軸にかかる負荷が大きい場合はモータと主軸との間にスリップが発生し、主軸位置検出結果をモータ速度のフィードバック制御に利用するとモータ速度の制御が不安定になるという問題が生じていた。
【解決手段】本発明の制御装置は、位置指令値に従って速度指令値を出力する位置制御部と、前記速度指令値に従って電流指令値を出力する速度制御部と、モータに流れる電流を検出する電流検出部と、電流に基づいてモータの第1速度を推定する第1速度推定部と、センサにより検出される主軸位置に基づいて算出される主軸速度及び変速比に基づいてモータの第2速度を推定する第2速度推定部と、モータ負荷の値を算出する負荷演算部と、を有し、速度制御部は、モータ負荷の値が所定の値以上の場合は第1速度を用い、所定の値未満の場合は第2速度を用いて電流指令値を算出する、ことを特徴とする。
(もっと読む)
電動機制御装置
【課題】駆動機構における慣性モーメント又は慣性質量、及び多慣性モデルのいずれも未知もしくは変動し得る場合でも、各種パラメータを調整することなくロバスト性の高い電動機の駆動制御を可能にする。
【解決手段】電流制御系ループにおいて、慣性変動抑制部3が第1外乱オブザーバ31を用いて推定した電動機200の外乱トルクを、第1トルク指令に加算して第2トルク指令を出力する。また、慣性変動抑制部3において外乱トルクを推定する第1外乱オブザーバ31が、電動機200の電動機速度に対応して駆動機構500の機械共振の影響を抑制した理想電動機の加減速トルク信号を出力する共振抑制モデル43を備えている。第1外乱オブザーバ31が、この理想電動機の加減速トルク信号を利用して外乱トルクを推定することで、慣性変動抑制部3は駆動機構500の機械共振に起因する振動を生じることなく駆動機構の慣性モーメントの変動を抑制する。
(もっと読む)
モータ制御装置
【課題】単相のエンコーダ信号によって三相スイッチング制御を実行する。
【解決手段】エンコーダ8は、二相のエンコーダ信号PA、PBを出力する。二相制御手段17は、両方のエンコーダ信号PA、PBに同期して励磁相を切換える。ひとつのエンコーダ信号だけが失われると、単相制御手段18によってモータ7が制御される。単相制御手段18は、失われたエンコーダ信号に代わって切換時期を推定する推定手段23を備える。単相制御手段18は、初期にオープン制御手段25によるオープン制御を実行する。オープン制御によってモータ7の回転が安定すると、単相フィードバック制御手段24による制御へ移行する。単相フィードバック制御手段24は、正常なエンコーダ信号と、推定された切換時期との両方に応答して励磁相を切換える。この結果、単相だけでもモータ7の制御が実行される。
(もっと読む)
モータ制御装置
【課題】基準位置を設定する壁当て制御の回数を抑制する。
【解決手段】壁当て制御手段23は、マニュアルレバー4をP壁5に押し付けることによってモータ7を制御するための基準位置を設定する。壁当て制御は、初期化条件の成立に応答して実行される。初期化条件は、電源スイッチ31のオン操作、および外部電源33の接続である。禁止手段は、初期化条件が非成立となってから、利用者が車両10から所定の閾値Dthを越えて離れるまで、初期化条件が再び成立しても、壁当て制御を禁止する。この結果、再度の壁当て制御を回避することができる。
(もっと読む)
フィードバック制御系の振動検出装置及び振動検出装置を備えたモータ制御装置
【課題】モータまたは負荷の慣性モーメントの値がずれても振動状態を精度良く検出し、素早く異常を察知して騒音や機械系の損傷等を防止することができるフィードバック制御系の振動検出装置および振動検出装置を備えたモータ制御装置を提供する。
【解決手段】負荷を連結したモータを制御対象とする制御装置の振動検出装置であって、制御装置は、制御対象をフィードバック制御してモータを制御する制御器部と、制御装置の出力の上下限ピーク値とそれらの発生時刻に基づいて、振動の発生を判断する振動状態判断部と、を備えた。
(もっと読む)
車両用の電動式ブレーキ装置
【課題】車両用の電動式ブレーキ装置において、電気モータの長寿命化を図る。
【解決手段】車両用の電動式ブレーキ装置は、アクセルペダルが操作量減少側に移動している際の速度であるアクセル減少速度を検出するアクセル減少速度検出手段(ステップ108)と、アクセル減少速度検出手段により検出されているアクセル減少速度が小さいほど電気モータに小さな電流を通電して、ブレーキ操作部材が操作される前に制動部材と被制動部材との隙間を第1隙間所定値になるまで小さくするモータ制御手段(ステップ108〜112,124)と、を備えている。
(もっと読む)
制御装置及び撮像装置及びその制御方法
【課題】PWM駆動制御による出力不感帯においても、フィードバック制御を正確に行うことができ、手ぶれ補正処理の精度向上をより一層図ることのできる撮像装置を提供する。
【解決手段】本発明の撮像装置は、撮像素子101を有して撮影光軸に直交する方向にモータにより可動される可動部1251と、撮像素子の位置を検出値として検出する位置検出部1252と、手ぶれによる撮像装置本体の振れ量に対応する目標値を検出する目標値算出部1241と、PWM駆動制御を用いてフィードバック制御を行うために検出値と目標値との差を演算してデューティ比を求める演算部1043と、モータ1255にデューティ比に応じた電流を流すことにより可動部1251を駆動する駆動部1254とを有する。演算部1043には、検出値と目標値との差により求められたデューティ比を補正することにより出力不感帯を除去する補正部1043Hが設けられている。
(もっと読む)
建設機械
【課題】電子制御系の異常判定に係る誤判定及び検出漏れの発生を抑制できる建設機械を提供すること。
【解決手段】旋回体と、旋回体を駆動する電動モータと、操作信号を操作量及び操作方向に応じて出力する操作装置と、操作信号に基づいて生成された制御信号に基づいて電動モータを制御するインバータ装置と、電動モータの速度を検出するための位置センサと、制御信号が規定する電動モータの速度指令V*から速度Vを減じた値の符号と、電動モータの加速度の符号とが異なる状態を第1条件とし、速度指令と速度の偏差が基準値Vthより大きく、かつ、加速度が基準値βthより大きい状態を第2条件としたとき、第1条件及び第2条件のうち少なくとも一方が成立するか否かを判定する第2コントローラとを備える。
(もっと読む)
モータ駆動装置
【課題】速度制御から位置制御への切替をシームレスに行い、機械伝達系に衝撃を与えないモータ駆動装置を提供する。
【解決手段】モータ駆動装置から前記上位コントローラ1への伝送遅れ時間の間のモータ移動量と、前記上位コントローラからモータ駆動装置への伝送遅れ時間の間のモータ移動量と、前記上位コントローラ1からモータ駆動装置への伝送遅れ時間の間のモータ移動量とを現在位置35に加算して前期の速度制御時指令位置37とし、速度制御から位置制御への切替時において、前回の前記速度制御時速度指令28から算出される位置偏差量を位置偏差24の初期値とするとともに、前記位置指令生成手段2において、前記位置偏差量を現在位置35に加算したものを位置制御時指令位置36の初期値として設定した後、前記目標位置指令21による位置制御を行うモータ駆動装置である。
(もっと読む)
モーター駆動方法、モーター駆動装置およびロボット
【課題】ロボットアームなどの被駆動部を高速で動作させることができるモーターの駆動方法、駆動装置およびロボットを提供する。
【解決手段】モーターの駆動トルク計測データと回転数計測データと、を取得する駆動データ取得工程と、前記駆動トルク計測データと前記回転数計測データと、を前記モーターの回転数/トルク特性テーブルと比較する比較工程と、前記比較工程の比較結果において、前記駆動トルク計測データと前記回転数計測データとが、前記回転数/トルク特性テーブルの駆動可能領域境界にある場合、前記モーターの駆動電圧を昇圧させる昇電圧工程と、を備えるモーター駆動方法。
(もっと読む)
位置検出装置及びサーボモータ
【課題】アクチュエータ毎に補正データを記憶するメモリを備える必要のない位置検出装置を提供する。
【解決手段】レゾルバ2がモータ1の回転位置情報を電気信号として出力し、その電気信号を電気ケーブル3で位置検出装置4のレゾルバデジタルコンバータ6に伝送し、レゾルバデジタルコンバータ6は電気信号からモータ1の回転位置情報を検出し、メモリ7に記憶されている電気ケーブルの情報に基づいて、演算装置8が検出されたモータ1の回転位置情報を補正することにより、レゾルバ2が設けられるモータ1毎に補正データを記憶するメモリを備える必要がない。また、電気ケーブル3の長さに対するインピーダンスの差による精度誤差情報を電気ケーブルの情報として記憶することにより、レゾルバ2で検出されるモータ1の回転位置の位置情報を正確に補正することが可能となる。
(もっと読む)
モータ駆動装置
【課題】最適なゲイン設定ができるゲイン切換判定手段を有したモータ駆動装置を提供する。
【解決手段】トルク指令25どおりにモータを駆動させるよう制御する電流制御手段3と、ゲイン切換信号34で選択されたゲインで制御する速度フィードフォワード手段4と、ゲイン切換信号34で選択されたゲインで制御するトルクフィードフォワード手段5と、モータ速度30を算出する速度検出手段6と、位置指令速度31を算出する位置指令速度検出手段7と、ゲイン切換信号34をオン/オフするゲイン切換判定手段8と、判定遅延時間設定手段9と、判定閾値設定手段10とを有し、ゲイン切換判定手段8にて判定遅延時間32経過後の位置指令速度31の絶対値が判定閾値33以下であればゲイン切換信号34をオンし、判定閾値33より大きい場合はゲイン切換信号34をオフのままとする。
(もっと読む)
1 - 20 / 472
[ Back to top ]