
Fターム[5H501JJ12]の内容
Fターム[5H501JJ12]の下位に属するFターム
プログラマブルカウンター回路 (4)
Fターム[5H501JJ12]に分類される特許
1 - 20 / 129
モータ制御装置
冷却ファン、制御方法及び電子機器
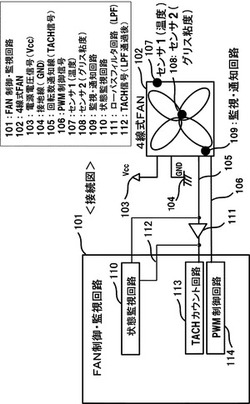
【課題】 冷却ファンなどの寿命部品における保全情報を利用する技術を提供する。
【解決手段】 寿命を予測するために必要な寿命情報を収集するセンサと、この前記寿命情報を他の情報のための信号線に重畳して送出する監視・通知手段とを備える冷却ファンと、前記信号線から前記寿命情報の成分を除くフィルタと、前記寿命情報に基づいて、冷却ファンの寿命を予測する状態監視手段とを備える電子機器。また、寿命を予測するために必要な寿命情報を収集するセンサと、前記寿命情報を他の情報のための信号線に重畳して送出する監視・通知手段とを備える冷却ファン。
(もっと読む)
周期エラー検出方法および周期エラー検出回路

【課題】周期処理の処理時間超過を確実に検出することのできる周期エラー検出方法および周期エラー検出回路を提供する。
【解決手段】実施形態の周期エラー検出方法は、カウンタ11と、レジスタ12とを有するキャプチャタイマ1を備え、周辺回路110から出力される周期トリガをキャプチャトリガCTG1として取得した第1のカウント値cnt1、モジュール120の処理開始時にキャプチャトリガCTG2をかけて取得した第2のカウント値cnt2、モジュール120の処理終了時にキャプチャトリガCTG3をかけて取得した第3のカウント値cnt3を、それぞれレジスタ12に保存する。プロセッサ100は、モジュール120からの完了通知を受け取ると、レジスタ12からcnt1、cnt2、cnt3を読み出し、その値にもとづいてモジュール120の処理時間を算出し、所定周期と比較して周期処理エラーの発生の有無を判定する。
(もっと読む)
位置検出装置、回転式アクチュエータ、および、それを用いたシフトバイワイヤシステム
【課題】パルス信号の出力に関する異常が生じても可動部材の位置の検出を継続可能な位置検出装置を提供する。
【解決手段】エンコーダ40は、モータ軸21が回転するのに応じ、所定の位相差を有する3相のパルス信号を出力する。ECU3は、カウント値を保持し、エンコーダ40が出力する3相のパルス信号のすべてが正常のとき出現する各パルス信号の組み合わせパターンである正常時パターン、および、3相のパルス信号のうち1相のパルス信号が異常のときのみ出現する各パルス信号の組み合わせパターンである異常時パターンに基づき、前記カウント値に対し第1所定値「1」、または、第2所定値「2」を加算または減算する。ECU3は、前記カウント値に基づき、モータ軸21の回転位置を検出する。
(もっと読む)
モータ制御回路及び該回路を実装したサーボ装置
【課題】モータ駆動制御用の駆動周波数を任意に変更して所望の操作感覚でサーボ装置を操縦すること。
【解決手段】受信機20を介して送信機10から制御信号として周波数設定信号を受信すると、予め記憶した駆動周波数設定情報のうち、受信した周波数設定信号に応じた情報を選択する。また、送信機10から制御信号である操縦信号を入力すると、選択された駆動周波数設定情報に基づき、パルス幅比較部34bから差分データタイミング信号に同期して取り込んだ差分データ信号を、選択された駆動周波数に対応するように周波数変換処理する。そして、得られた差分データ変換信号を周波数処理情報に基づき所定のカウント範囲まで使用して駆動信号を生成し、駆動機構32の駆動制御を行う。
(もっと読む)
電動パワーステアリング装置
【課題】モータロックを防止することにより、システムの安定的な停止が図れ、安全な電動パワーステアリング装置を提供する。
【解決手段】
マイコン17は、短絡異常検出フラグがオンの場合には、短絡異常判定検出中と判断して、積算判定を実行する。そして、マイコン17は、短絡異常確定フラグがオンの場合には、通電不良発生相以外の二相を通電相とするアシスト力を発生中に、通電不良発生相が、通電不良発生相以外の二相のうちの一相と短絡異常確定となったと判断して、アシスト力の発生を停止する。
(もっと読む)
駆動装置
【課題】ロータの回転を機械的に停止させて基準位置を求める突当学習時の突当トルクの精度を高める。
【解決手段】通電開始時にロータが回転する状態で電動モータを通電して励磁相の飽和電流値を検出し、検出した飽和電流値に応じて突当学習の実行時のデューティ比を算出して、突当学習を実施する際における電動モータの出力を「予め設定した目標トルク」に低減させる。これにより、諸条件により電動モータの電流の流れ易さが変化しても、突当トルクを目標トルクにコントロールすることができ、突当トルクの精度を高めることができる。突当トルクが与えられる電動アクチュエータの出力系や、パーキング切替機構のディテント機構等の機械的な負担の変動を抑えることができ、シフトバイワイヤ(パーキングバイワイヤ)の耐久性を高めることができる。
(もっと読む)
フィードバック制御系の振動検出装置及び振動検出装置を備えたモータ制御装置
【課題】モータまたは負荷の慣性モーメントの値がずれても振動状態を精度良く検出し、素早く異常を察知して騒音や機械系の損傷等を防止することができるフィードバック制御系の振動検出装置および振動検出装置を備えたモータ制御装置を提供する。
【解決手段】負荷を連結したモータを制御対象とする制御装置の振動検出装置であって、制御装置は、制御対象をフィードバック制御してモータを制御する制御器部と、制御装置の出力の上下限ピーク値とそれらの発生時刻に基づいて、振動の発生を判断する振動状態判断部と、を備えた。
(もっと読む)
射出成形機
【課題】整流部に流れる循環電流を抑制できる、射出成形機を提供すること。
【解決手段】モータと、前記モータを駆動する駆動回路と、前記駆動回路に電力を供給する整流器102と、前記駆動回路と整流器102との間に設けられたコンデンサ301と、前記駆動回路と整流器102との間の直流電力を交流電力に変換するブリッジ回路104と、ブリッジ回路104の交流部側に接続された高調波成分抑制部63と、整流器102に並列接続された回生経路82とを有し、ブリッジ回路104と高調波成分抑制部63とを回生経路82に備える、射出成形機あって、ブリッジ回路104を構成する複数のスイッチング素子は、コンデンサ301の電圧が所定値以上のとき、前記モータの電力を回生するようにオン/オフし、コンデンサ301の電圧が前記所定値未満のとき、全てオフする、ことを特徴とする、射出成形機。
(もっと読む)
位置決め制御装置
【課題】精密測定装置に振動等が発生した場合に位置決め制御装置の制御ゲインを調整する際、その調整時間の短縮化、及び、ゲイン調整に掛かる労力の軽減化を図ること。
【解決手段】位置決め制御装置100は、位置補償部10、速度補償部20、電流補償部30、設定テーブル40及びゲイン選択手段50を有する。位置補償部10は目標位置及び検出位置の位置偏差を得て、これに基づき目標速度を制御する。速度補償部20は、目標速度及び検出速度の速度偏差を得て、これに比例ゲインKpを掛けた値及び速度偏差の積分に積分ゲインKiを掛けた値の加算値をモータの目標電流として出力する。電流補償部30は、目標電流及びモータの検出電流の電流偏差を得て、これに基づいて駆動電流を制御する。ゲインKp、Kiの設定値の組合せが複数通り設定テーブル40に記憶されており、選択手段50で選択された組合せに各ゲインが書き換えられるようになっている。
(もっと読む)
建設機械
【課題】電子制御系の異常判定に係る誤判定及び検出漏れの発生を抑制できる建設機械を提供すること。
【解決手段】旋回体と、旋回体を駆動する電動モータと、操作信号を操作量及び操作方向に応じて出力する操作装置と、操作信号に基づいて生成された制御信号に基づいて電動モータを制御するインバータ装置と、電動モータの速度を検出するための位置センサと、制御信号が規定する電動モータの速度指令V*から速度Vを減じた値の符号と、電動モータの加速度の符号とが異なる状態を第1条件とし、速度指令と速度の偏差が基準値Vthより大きく、かつ、加速度が基準値βthより大きい状態を第2条件としたとき、第1条件及び第2条件のうち少なくとも一方が成立するか否かを判定する第2コントローラとを備える。
(もっと読む)
信号伝達装置及びこれを用いたモータ駆動装置
【課題】ドライバチップの異常検出期間が短過ぎると、異常パルス信号のパルス生成が停止された後、異常判定期間の経過前に異常パルス信号のパルス生成が再開されてしまい、コントローラチップでドライバチップの異常を認識することができなくなるおそれがあり、2つの回路を絶縁しつつ一方の異常を確実に他方に伝達することのできる信号伝達装置、及びこれを用いたモータ駆動装置を提供する。
【解決手段】信号伝達装置100は、第1回路110と第2回路120との間を絶縁しながら信号伝達を行うものであり、第1回路110は、第2回路120から伝達される異常パルス信号Sbを監視して第2回路120の異常有無を判定し、第2回路120は、第2回路120で異常が検出されてから少なくとも第1回路110で第2回路120の異常有無が判定されるまで異常パルス信号Sbを異常状態に保持する。
(もっと読む)
モータ駆動装置
【課題】速度制御から位置制御への切替をシームレスに行い、機械伝達系に衝撃を与えないモータ駆動装置を提供する。
【解決手段】モータ駆動装置から前記上位コントローラ1への伝送遅れ時間の間のモータ移動量と、前記上位コントローラからモータ駆動装置への伝送遅れ時間の間のモータ移動量と、前記上位コントローラ1からモータ駆動装置への伝送遅れ時間の間のモータ移動量とを現在位置35に加算して前期の速度制御時指令位置37とし、速度制御から位置制御への切替時において、前回の前記速度制御時速度指令28から算出される位置偏差量を位置偏差24の初期値とするとともに、前記位置指令生成手段2において、前記位置偏差量を現在位置35に加算したものを位置制御時指令位置36の初期値として設定した後、前記目標位置指令21による位置制御を行うモータ駆動装置である。
(もっと読む)
モータの駆動制御プログラム、駆動制御方法及び駆動制御装置
【課題】従来のモータ制御方法では、モータの制御性を十分に確保することができない問題がある。
【解決手段】本発明にかかるモータ駆動制御プログラムは、モータの回転位置に応じて生成するPWM信号の状態を遷移させる演算コア10と、ドライバ回路3を介して前記PWM信号をモータに出力する出力インタフェース13と、ドライバ回路3がPWM信号に基づき生成した3相の駆動信号から選択した比較対象検出信号SPと3相の駆動信号の中点電圧を示すのセンタータップ電圧CTとを比較するコンパレータ15と、を有するプロセッサにおいて演算コア10で実行されるモータの駆動制御プログラムであって、コンパレータ15の出力信号の値に基づきコンパレータ積分値を増減し、コンパレータ積分値がカウント初期値に達したことに応じてモータの回転位置が遷移したことを検出し、検出結果に応じてPWM信号の状態を次状態に遷移させる。
(もっと読む)
画像形成装置、画像形成装置の制御方法、および画像形成装置の制御プログラム
【課題】装置の小型化を図ることのできる画像形成装置、画像形成装置の制御方法、および画像形成装置の制御プログラムを提供する。
【解決手段】画像形成装置としてのMFPは、縦搬送モータ100と、本体側制御基板200と、センサ1および2とを備えている。縦搬送モータ100において、エンコーダ103は、縦搬送モータ100の回転数に応じた周波数を有するエンコーダ信号405を発生し、センサ信号重畳部113は、センサ1および2の論理状態の入力を受け付ける。センサ信号重畳部113は、センサ1および2の論理状態に基づいて、エンコーダ信号405のデューティ比を変調することにより、エンコーダ信号405にセンサ1および2の論理状態を重畳し、重畳後のエンコーダ信号401を出力する。本体側制御基板200において、センサ信号分離部203は、入力されたエンコーダ信号401を復調することにより、センサ1および2の論理状態を得る。
(もっと読む)
自動扉制御装置、自動扉システム、自動扉制御方法及び自動扉調整方法
【課題】自動扉が傾いた場所に設置された場合であっても、扉の開動作及び閉動作を所定の時間で行うことができる自動扉制御装置、自動扉システム、自動扉制御方法及び自動扉調整方法を提供する。
【解決手段】モータ駆動装置29の駆動制御部41は、カウンタ部44の記憶部Cnt2A、Cnt2B、Cnt4に予め設定された切替条件に従って、移動速度を切り替えながら自動扉の開又は閉動作を行い、自動扉の移動開始位置から移動停止位置までの移動時間をタイマ部45にて測定する。測定した移動時間が仕様などに規定された所定時間より短い/長い場合、減速開始点補正部46にて自動扉の高速移動から減速移動への切り替えを早める/遅らせるよう、切替条件の変更を行う。
(もっと読む)
駆動制御装置、画像形成装置、駆動制御方法及びプログラム
【課題】起動時において、機構のバックラッシュ等のギヤの噛合いで生じる衝撃によってエンコーダ等の検出系が加振され、機構の速度や位置が誤検出された場合であっても、フィードバック制御系が安定となるような駆動制御装置、画像形成装置、駆動制御方法及びプログラムを提供すること。
【解決手段】電動機と、前記電動機の出力を伝達する伝達機構部と、前記伝達機構部に連結することで前記電動機の出力により駆動される従動機構部と、前記電動機、前記伝達機構部又は前記従動機構部のいずれか1つの速度又は位置を検出する検出部と、前記検出部の出力値と目標値との偏差の値に基づき、補償器を用いて所定の演算を行う補償器演算部と、前記補償器演算部の結果に基づいて前記電動機を駆動させる電動機駆動部と、を有する駆動制御装置であって、前記補償器演算部に入力する前記偏差の値に制限をかける偏差制限部を有する駆動制御装置によって解決される。
(もっと読む)
モータの制御装置及び制御方法
【課題】モータの回転速度が変化する場合でも、安定的に精度よくモータを制御することの可能なモータの制御装置を提供する。
【解決手段】所定の周期でモータの回転量を検出するモータ回転量検出手段と、前記モータ回転量検出手段が前記モータの回転量を検出した回数を計測する計測手段(S2)と、計測値が計測間隔を超えたか否かを判定する計測間隔判定手段(S4)と、計測間隔を超えたと判定された場合、検出されたモータの回転量、計測間隔判定手段により計測間隔を超えたと判定された際に検出されたモータの回転量、及び計測間隔判定手段により計測間隔を超えたと判定されてからの経過時間からフィードバック速度を算出する速度算出手段(S5)と、算出されたフィードバック速度と速度指令値とを比較して、いずれか速い方から計測間隔を算出し、計測間隔判定手段に設定する計測間隔算出手段(S6〜S9)とを備える。
(もっと読む)
駆動装置
【課題】モータの回転動力を作動部に伝達する駆動伝達機構の不具合を装置自身で解消し得るようにする。
【解決手段】演算・制御部11は、動力伝達機構4に不具合が生じたときに動力伝達機構4に衝撃を与えてその不具合を解消するための振動手段16を備えている。振動手段16はモータ6の駆動を開始してから所定時間内にエンコーダ8のカウント数が収束状態にならないときに振動動作を実行するよう構成されている。
(もっと読む)
モータ制御装置
【課題】モータの電源電圧の変動等が要因となって、スイッチト・キャパシタ・フィルタのような抽出回路がリプル成分を正確に抽出しなくても、抽出されなかったリプル成分のパルス数を補足できるようにする。
【解決手段】モータ制御装置1が、モータ2と、モータ2の電流信号のリプル成分をパルス信号に変換する抽出回路と、モータ2の電圧を検出するA/Dコンバータ7と、パルス信号を入力する制御部4と、を備える。制御部4が、A/Dコンバータ7によって検出された電圧の変動を検出した場合に、電圧変動の直前の一パルス分又は複数パルス分のパルス周期T_beforeと、電圧変動から所定期間t経過後の一パルス分又は複数パルス分のパルス周期T_afterとの平均周期T_averageを算出し、所定期間tを平均周期T_averageで除して得られる商nを算出する。
(もっと読む)
1 - 20 / 129
[ Back to top ]