
Fターム[5H501LL01]の内容
Fターム[5H501LL01]の下位に属するFターム
アナログ値で検出するもの (71)
デジタル値で検出するもの (383)
センサレスで検出するもの (103)
Fターム[5H501LL01]に分類される特許
1 - 20 / 402
アクチュエータ制御装置及び方法
モータ制御装置及びモータ制御方法
回転機の制御装置
モータ駆動制御装置及び集積回路装置
回転力発生装置
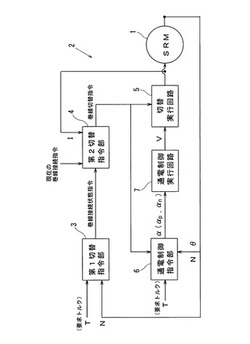
【課題】相巻線における巻線の接続状態を切り替えても、トルク波形の変動が生じない回転力発生装置を提供する。
【解決手段】トルクTと回転数Nを用いて相巻線の「直列接続→並列接続」または「並列接続→直列接続」の切替えを実施する際に、相巻線の通電状態が非通電のタイミングで切替えを実施するとともに、相巻線の電流波形を制御して切替え直前と直後のトルク波形を略同一波形に揃える。これにより、SRモータ1は、広い運転領域において高出力を得ることができるとともに、相巻線の通電中に巻線組の切替えが実施されることで生じるトルク変動を回避でき、さらに、巻線組の切替えが行われて巻線組のインダクタンスが変化することによるトルク波形の変動も回避することができる。
(もっと読む)
金属ストリップの破断検知システムおよび破断検知方法

【課題】張力実績値を取得することが難しく、また各種センサを設置することが難しい環境下にある製造ラインの処理セクションであっても、金属ストリップが破断した状態であることを検知することができる金属ストリップの破断検知システムおよび破断検知方法を提供する。
【解決手段】破断状態判定部27は、トルク電流実績値実績値Iから算出されたロールの回転速度変化率α´(mpm/s)と、ロールの回転速度実績値V(mpm)から算出された回転速度変化率α(mpm/s)との差の絶対値(回転速度変化率Δα(mpm/s))が、破断状態判定閾値記憶部26に記憶されている破断状態判定閾値Kを超えた場合に、製造ライン上の金属ストリップSが破断した状態であると判定する。
(もっと読む)
モータを制御するための方法およびシステム
【課題】DCバス電圧利用率を確保するために、可能な限り大きなモータトルクを確保する電圧振幅および電圧位相角の適した点を迅速に決定する方法およびシステムを提供する。
【解決手段】モータ10を制御するための方法は、モータの電気信号を信号ユニット60によって入手するステップを含む。電気信号は、モータトルクおよび角速度を含む。電圧ベクトルの電圧位相角を計算機器によって計算するステップをさらに含む。コマンドトルクTcmd、モータトルク、角速度、および電圧ベクトルの電圧振幅が、計算機器の入力である。方法は、インバータ20を制御するスイッチング信号へと電圧位相角および電圧振幅を変調器40によって変調するステップをさらに含む。方法は、スイッチング信号にしたがって電圧ベクトルへと直流電圧をインバータによって変換するステップ、およびモータへ電圧ベクトルを印加するステップをさらに含む。
(もっと読む)
電気モータ制御装置
【課題】固定容量型のポンプを使用しつつ、レバーの操作量に応じた速度でアクチュエータを駆動する。
【解決手段】電気モータの回転速度を制御する電気モータ制御装置であって、ポンプの吐出圧が最高負荷圧よりも所定の設定圧だけ高くなるように、最高負荷圧に基づいて電気モータの暫定目標回転速度を算出し(S74)、ポンプの吐出圧に基づいて、電気モータの出力トルクがその吐出圧のときに出力可能な最大トルクとなる電気モータの回転速度を上限回転速度として算出し(S75)、暫定目標回転速度と上限回転速度とのうち、低いほうを電気モータの目標回転速度として算出し(S76)、電気モータの回転速度が目標回転速度となるように、電気モータの回転速度を制御する(S77)ことを特徴とする。
(もっと読む)
スイッチドリラクタンスモータの駆動装置及びその方法
【課題】本発明は、スイッチドリラクタンスモータの駆動装置及びその方法に関する。
【解決手段】本発明によると、電源部と、N対のコイルと、前記N対のコイルのそれぞれのコイル上部に直列連結されたN個の共通スイッチ素子と、前記N対のコイルのそれぞれのコイル下部に直列連結されたN対の下位スイッチ素子と、第1フリーホイールダイオードと、第2フリーホイールダイオードと、前記N個の共通スイッチ素子及びN対の下位スイッチ素子に制御信号を提供して、N対のコイルに順に電流が供給されるようにするスイッチ駆動部と、を含むスイッチドリラクタンスモータの駆動装置及びその方法が提供される。
(もっと読む)
制振制御装置
【課題】フィルタへの余剰トルク成分の蓄積を抑制する制振制御装置を提供する。
【解決手段】車両に設けられたモータを制振させる制振制御装置において、車両の車両情報を入力として、車両へのトルク入力と前記モータの回転速度の理想伝達特性のモデルGm(s)と、車両へのトルク入力とモータの回転速度の実伝達特性のモデルGp(s)とを用いたモデルGm(s)/Gp(s)を含むフィルタにより第1トルク目標値を算出する第1トルク目標値算出手段と、モータの回転速度を検出するモータ回転速度検出手段と、モデルGp(s)を含むフィルタを用いて、トルク指令値及び回転速度検出手段により検出された検出回転速度に基づいて、第2トルク目標値を算出する第2トルク目標値算出手段と、第1トルク目標値と前記第2トルク目標値とを加算してトルク指令値を算出する加算手段と、トルク指令値に基づいて、モータを制御するモータ制御手段とを備える。
(もっと読む)
スイッチドリラクタンスモータの駆動装置及びその方法
【課題】本発明は、スイッチドリラクタンスモータの駆動装置及びその方法に関する。
【解決手段】本発明は、電源部と、N対のコイルと、前記N対のコイルそれぞれのコイルの上部に直列連結されたN対の上位スイッチ素子と、前記N対のコイルそれぞれのコイルの下部に直列連結されたN対の下位スイッチ素子と、2N個の第1フリーホイールダイオードと、2N個の第2フリーホイールダイオードと、前記N対の上位スイッチ素子とN対の下位スイッチ素子に制御信号を提供してN対のコイルに順に電流が供給されるようにするスイッチ駆動部と、を含むスイッチドリラクタンスモータの駆動装置とその方法を提供する。
(もっと読む)
球面モータの制御装置および球面モータの制御方法
【課題】3自由度以上の回転が可能な球面モータの動作制御を直感的に把握し易い状態で行う。
【解決手段】任意の方向に回転が可能な概球回転体の運動に係る信号出力に基づき、球面モータ300のロータを動作させるために、球面モータ300の界磁コイル309への通電パターンを生成する界磁コイル通電パターン生成部201と、前記通電パターンに基づく駆動信号を出力する駆動信号出力部202とを備える。
(もっと読む)
電動過給機の異常検出装置と検出方法
【課題】電動機の経時劣化を迅速かつより正確に検出する電動過給機の異常検出装置と異常検出方法を提供することを目的とする。
【解決手段】電動機によりコンプレッサを駆動して内燃機関の過給を行う電動過給機の異常検出装置であって、直流電源から前記電動機に供給される電力または電流に対して、電動機の定格回転速度を定める電動機定格回転速度導出手段(61,62)と、前記定格回転速度と実回転速度との差分が閾値以上の場合に異常検出信号を発生する異常有無判定手段(63)と、を備える。
(もっと読む)
モータ制御装置及び画像形成装置
【課題】高速且つ高精度に駆動対象を目標位置に停止可能とする。
【解決手段】モータ制御ユニットは、モータに入力可能な電流上限値を推定し、この上限値に対応する駆動電流でモータを駆動する第一制御処理(S140,S150)を実行する。また、第二制御処理(S210,S220)では、電流上限値よりも小さい偽の電流上限値を、電流上限値の算出式に用いる係数を切り替えることで算出し、その偽の電流上限値に対応する駆動電流でモータを駆動する。そして、第三制御処理(S300)では、第二制御処理終了時の駆動対象の位置P及び速度Vに基づき、定速区間及び減速区間の目標プロファイルを設定し、駆動対象の位置及び速度が、目標プロファイルが示す位置及び速度を追従するように、モータに対する電流指令値を調整する。これによって第三制御処理の初期に電流指令値が電流上限値を超えないようにモータ制御を実行し、駆動対象を目標位置に停止させる。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】通電不良の発生に伴う二相駆動時のモータ回転を円滑化して安定的に高い出力性能を確保することのできるモータ制御装置及び電動パワーステアリング装置を提供すること。
【解決手段】マイコンは、所定のサンプリング周期で取得した各電流センサの出力信号に基づいて、モータの各相電流値を検出する。そして、今回の検出値とともに少なくとも前回の検出値が保持される。そして、当該二相駆動時には、今回の電流検出時における回転角と前回の電流検出時における回転角との間に漸近線に対応する所定の回転角を挟む場合には、その保持された今回の検出値及び前回の検出値について、その絶対値がより大きな値となるように補正する。
(もっと読む)
回転機の制御装置
【課題】電流センサの出力値に実際の電流の振幅に対して所定の比率(≠1)だけ相違する誤差であるいわゆるゲイン誤差が含まれる場合、これに起因してモデル予測制御の制御性が低下するおそれがあること。
【解決手段】偏差算出部40,44では、予測電流ide,iqeのそれぞれと同位相の実電流id,iqとの差が算出される。フィードバック制御部42,46のそれぞれでは、偏差算出部40,44の出力値をゼロにフィードバック制御するための操作量(補償量idcomp,iqcomp)が算出される。これら補償量idcomp,iqcompによって、予測部33によって予測される予測電流ide,iqeが補正される。
(もっと読む)
主軸駆動用モータの制御装置
【課題】主軸にかかる負荷が大きい場合はモータと主軸との間にスリップが発生し、主軸位置検出結果をモータ速度のフィードバック制御に利用するとモータ速度の制御が不安定になるという問題が生じていた。
【解決手段】本発明の制御装置は、位置指令値に従って速度指令値を出力する位置制御部と、前記速度指令値に従って電流指令値を出力する速度制御部と、モータに流れる電流を検出する電流検出部と、電流に基づいてモータの第1速度を推定する第1速度推定部と、センサにより検出される主軸位置に基づいて算出される主軸速度及び変速比に基づいてモータの第2速度を推定する第2速度推定部と、モータ負荷の値を算出する負荷演算部と、を有し、速度制御部は、モータ負荷の値が所定の値以上の場合は第1速度を用い、所定の値未満の場合は第2速度を用いて電流指令値を算出する、ことを特徴とする。
(もっと読む)
電動パワーステアリング装置
【課題】モータロックを防止することにより、システムの安定的な停止が図れ、安全な電動パワーステアリング装置を提供する。
【解決手段】
マイコン17は、短絡異常検出フラグがオンの場合には、短絡異常判定検出中と判断して、積算判定を実行する。そして、マイコン17は、短絡異常確定フラグがオンの場合には、通電不良発生相以外の二相を通電相とするアシスト力を発生中に、通電不良発生相が、通電不良発生相以外の二相のうちの一相と短絡異常確定となったと判断して、アシスト力の発生を停止する。
(もっと読む)
電動機制御装置
【課題】駆動機構における慣性モーメント又は慣性質量、及び多慣性モデルのいずれも未知もしくは変動し得る場合でも、各種パラメータを調整することなくロバスト性の高い電動機の駆動制御を可能にする。
【解決手段】電流制御系ループにおいて、慣性変動抑制部3が第1外乱オブザーバ31を用いて推定した電動機200の外乱トルクを、第1トルク指令に加算して第2トルク指令を出力する。また、慣性変動抑制部3において外乱トルクを推定する第1外乱オブザーバ31が、電動機200の電動機速度に対応して駆動機構500の機械共振の影響を抑制した理想電動機の加減速トルク信号を出力する共振抑制モデル43を備えている。第1外乱オブザーバ31が、この理想電動機の加減速トルク信号を利用して外乱トルクを推定することで、慣性変動抑制部3は駆動機構500の機械共振に起因する振動を生じることなく駆動機構の慣性モーメントの変動を抑制する。
(もっと読む)
過大速度制御装置
【課題】システム安定性を損なわず、かつ設定回転速度を下げることなく制御できる過大速度制御装置を提供する。
【解決手段】油圧モータ13の容量可変部13aに過大速度制御装置21を連結する。この制御装置21は、回転速度センサ19により検出した回転速度から過大速度制御指令値Vreを演算する過大速度制御指令演算部22と、過大速度制御指令値Vreと操作指令値Vopとの指令偏差を演算して油圧モータ13の容量可変部13aに出力する指令偏差演算部24とを備えている。上記演算部22は、実際のモータ回転速度Vと通常時のモータ設定回転速度Vsとの速度偏差を演算し、実際の速度Vから過大速度制御機能を作動させるONトリガ点と過大速度制御機能を停止させるOFFトリガ点とを判定し、ONトリガ点と判定したときは上記指令値Vreを出力するとともにOFFトリガ点と判定したときは上記指令値Vreの出力を停止する。
(もっと読む)
1 - 20 / 402
[ Back to top ]