
Fターム[5H501LL06]の内容
Fターム[5H501LL06]の下位に属するFターム
パルスエンコーダを用いるもの (343)
ホール素子を用いるもの (11)
Fターム[5H501LL06]に分類される特許
1 - 20 / 29
誘導電動機の制御装置及び制御方法
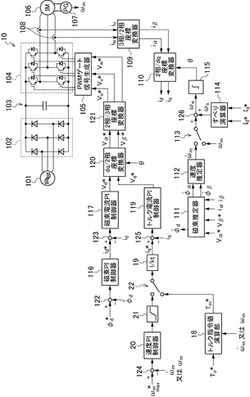
【課題】誘導電動機の回転速度を把握し、その回転速度よりトルク指令値を演算した後、そのトルク指令値で誘導電動機を制御することでトルクモータと同等の回転速度−トルク特性が得られるようにすることができる誘導電動機の制御装置又は制御方法を提供する
【解決手段】誘導電動機の制御装置10は、基本トルク指令値と誘導電動機106の検出速度又は速度推定部112からの推定速度とからトルク指令値を演算するトルク指令値演算部18と、トルク指令値に基づいて、トルク電流指令値を演算するトルク電流指令値演算部19とを備える。
(もっと読む)
モータ制御回路

【課題】モータの速度を可変制御するモータ制御回路において、設定されるモータの速度に応じた適切な制御ゲインを自動的に設定可能なモータ制御回路を提供する。
【解決手段】本発明に係るモータ制御回路10は、速度検出手段FGから入力される検出信号の周期FG_countと外部から入力される基準信号EXCの周期EXC_countとの差に応じた周期誤差信号を出力する周期誤差信号出力手段20と、周期誤差信号に速度ゲインを乗算して得られる速度誤差信号を出力する速度誤差信号出力手段22と、基準信号EXCの周期EXC_countに対する補正基準周期Ref_countの比を補正量とし、その補正量を2乗して速度誤差信号出力手段22が備える所定の速度ゲインKfに乗算することにより、所定の速度ゲインKfを補正するゲイン補正手段28、30とを備えている。
(もっと読む)
モータ制御回路
【課題】簡素なデジタル回路を用いて構成され、広範な制御レンジでゲインを調整可能なモータ制御回路を提供する。
【解決手段】モータ駆動制御部90は、トルク指令データと第3の基準クロックとに応じて、モータ100を駆動する。トルク指令データは、第1の基準クロックとFG信号とに応じて速度誤差検出部40が出力する速度誤差データと第2の基準クロックとFG信号とに応じて位相誤差検出部60が出力する位相誤差データとが加算回路80で加算されて生成される。速度誤差データ及び位相誤差データは、それぞれ、速度検出用値設定部51及びカウント値設定部53、又は位相検出用値設定部71及びカウント値設定部73により設定される所定の範囲で出力される。第3の基準クロックの周波数を固定したままの広範な制御レンジで、第1及び第2の基準クロックの周波数を調整することによって、制御ゲイン及び制御範囲を設定できる。
(もっと読む)
モータ駆動制御装置
【課題】回転数が安定な通常動作時だけでなく回転数が急変したときにも、モータの回転を検出する位置センサの出力に基づいてモータの回転数を正確に認識してモータを駆動制御する。
【解決手段】回転加速度算出部12の制御により、位置センサ7の基準信号(Z相の信号)より周期が短いパルス信号(A相、B相のパルス信号)に基づいて急変回転数算出部9が追従応答性よく算出した回転数の増減の変化量が所定値を超えない通常動作時には、前記基準信号に基づいて通常回転数算出部10が駆動モータ2の実際の回転の細かな変動の影響を受けることなく算出した回転数を認識回転数として選択部11からインバータ制御部13に出力し、急変回転数算出部9が算出した前記変化量が所定値を超えると、急変回転数算出部9が算出した回転数を認識回転数として選択部11からインバータ制御部13に出力し、インバータ制御部13により認識回転数に基づいてインバータ3を制御する。
(もっと読む)
指針型表示器のモータ制御装置
【課題】機械式のアナログ式表示器に用いられ、指針を滑らかに移動させることによって見た目に違和感のない指針型表示器を実現するモータ制御装置を提供する。
【解決手段】モータ駆動制御部11は、所定時間毎に順次入力されるデータDaをデータ受信部10が複数受信すると、受信した複数のデータDaのうち少なくとも最初に受信したデータDaと最後に受信したデータDaから指針の回転量を算出するとともに、最初のデータDaを受信してから最後のデータDaを受信するまでの時間を指針の移動時間に設定する。またモータ駆動制御部11は、上記移動時間で上記回転量だけ指針を連続的に回転させる回転速度であって、上記移動時間の中間期間に比べて上記移動期間の開始期間及び終了期間が低速となる回転速度を算出し、指針が上記回転速度で回転するようにモータ駆動部12を制御する。
(もっと読む)
モータの回転速度制御回路
【課題】 積分回路を用いることなくモータの回転速度を安定させる。
【解決手段】 モータの回転速度に応じた周波数を有する速度パルス信号と前記モータの目標回転速度に応じた周波数を有する基準パルス信号との周期差を第1のクロックでカウントした第1のカウント値を出力する第1の周期差検出回路と、前記速度パルス信号と前記基準パルス信号との周期差を前記第1のカウント値に応じた周波数の第2のクロックでカウントした第2のカウント値を出力する第2の周期差検出回路と、前記第2のカウント値に応じたデューティ比のパルス幅変調信号を生成し、前記モータの駆動電流を出力する出力回路に供給するパルス幅変調回路と、を有する。
(もっと読む)
回転数検出装置
【課題】回転体の回転に応じてスイッチング素子をオン/オフさせることにより電流変動を生じさせることで回転数信号を生成するに際し、当該電流変動を小さくする。
【解決手段】スイッチング素子14に並列に抵抗素子16を設け、スイッチング素子14がオフ状態のときにも電源24からプルアップ抵抗21、接続点25、ワイヤ30、および抵抗素子16を介してグランド17に電流が流れるようにする。これにより、スイッチング素子14がオン状態のときに接続点25に流れる電流とオフ状態のときに接続点25に流れる電流との差が小さくなり、ひいては電流変動が小さくなる。
(もっと読む)
電子装置およびファンの制御方法
【課題】ファンの回転速度を目標回転速度で回転させること
【解決手段】入力される制御信号のデューティ比に応じて回転速度が変化するモータを有し、モータの回転速度を計測する回転速度検出部を有するファン27と、温度を計測する温度検出ユニット26と、温度検出ユニットによって測定された温度に対応する目標回転速度を複数格納する不揮発性メモリ253と、ファンに入力された制御信号のデューティ比と回転速度検出部によって計測された回転速度との組み合わせを複数組取得し、デューティ比と回転速度との特性を示す関数を演算する特性関数演算モジュール303と、モータを目標回転速度で回転させるために、関数に基づいて当該目標回転速度に対するデューティ比を演算するデューティ比演算モジュール304と、デューティ比演算モジュールによって演算されたデューティ比の制御信号をファンに出力する回転制御部307とを具備する。
(もっと読む)
モータ制御装置
【課題】モータの制御を行う専用LSIを有する制御回路からの不要輻射ノイズを抑制することができる安価で小型軽量のモータ制御装置を提供する。
【解決手段】各機能を消費電流量に基づいて複数に分割した機能ブロックAから機能ブロックDは、消費電流の平均化を図ったもので、予め動作時間を固定しておく。また、動作タイミングを検知してから機能ブロックAから機能ブロックDが順次起動するように、別々の起動遅延時間を設定しておき、各機能ブロックの重複動作を防止する(図2b)。各機能ブロックの動作が重複しないため、低い電流が一定期間流れ続ける構成となり、電流量のピークが平均化され(図2c)、不要輻射ノイズの発生が抑制される。
(もっと読む)
PMモータの制御装置及び制御方法
【課題】周期的な外乱であるトルクリプルを精度よく抑制することができるPMモータの制御方法及び制御装置を提供すること。
【解決手段】本制御装置は、モータ角速度ω、非線形摩擦補償トルクTf(ω)、及びモータトルク指令値Tref等からトルクリプル値を推定するトルクリプル推定手段と、第1のスイッチを外乱1周期の間のみオンにして、トルクリプル推定手段によって推定したトルクリプル値から繰り返し補償信号を生成し、かつ、周期外乱データをメモリに保存し、第2のスイッチをオンにして、周期外乱データを、1サンプル先の予見値を与える外乱補償信号として順番に出力することで補償を行う周期信号発生器とを備えている。
(もっと読む)
電動機の制御装置
【課題】負荷機械の慣性モーメントが変化する場合でも、速度制御応答を可変にしたり、外部コントローラによりトルク補償を行ったりすることなく、速度制御系の応答を一定に保持することができ、ドライブ調整内容を簡略化できる電動機の制御装置を得る。
【解決手段】理想速度ω0を出力する機械系モデル7と、速度指令SP_Ref及び理想速度ω0の偏差に基づきトルク信号τ0を出力するモデルASR8と、電動機速度ω1及び理想速度ω0の偏差に基づき補償トルク信号τ1を出力するASR9とを備える。そして、負荷機械3の慣性モーメントが変化した場合は、トルク信号τ0を出力するための速度制御ゲイン及び補償トルク信号τ1を出力するための速度制御ゲインを変更することなく、負荷追従するようにトルク補償を行う。
(もっと読む)
周波数同期ループ回路、速度ディスクリミネータ回路、モータ駆動装置
【課題】本発明は、REFCLKの逓倍を要しないFLL回路の提供を目的とする。
【解決手段】本発明に係るFLL回路12は、FGエッジが到来したときにICLKのカウントを開始し、カウント値C1がSTOP1に達したときにカウントを終了するカウンタ回路X10と;カウンタ回路X10がカウント終了したときにICLKのカウントを開始し、カウント値C2がSTOP2に達したときにカウントを終了するカウンタ回路X20と;REFCLKの一周期中に含まれるICLKのパルス数をカウントする基準カウンタY1と;REFCLKの一周期毎に基準カウンタY1のカウント値C0を格納する基準レジスタY2と;基準レジスタY2のレジスタデータREG0を分配してSTOP1とSTOP2を設定する終了カウント値設定部Y0と;カウンタ回路X10、X20の動作状態に応じて周波数誤差信号(U1、D1)を生成する論理ゲート部X30と;を有する。
(もっと読む)
モータ駆動制御装置及び画像形成装置
【課題】安定した品質性能が得られ、部品点数も低減されたモータ駆動制御を実現する。
【解決手段】モータ1012の回転速度を制御するモータ駆動制御装置10であって、モータ1012を回転駆動するモータドライバ1011と、第2転写ローラ113の回転速度を検出するエンコーダ1014及びカウンタ711と、当該検出された第2転写ローラ113の回転速度と、予め設定されている転写ローラ回転速度との差を算出する速度差算出部71と、速度差算出部71によって算出された速度差に対応する速度制御信号を生成し、当該生成した速度制御信号をモータドライバ1011に出力する速度制御部72とを備える。
(もっと読む)
モータ制御回路
【課題】モ―タ制御回路の全体をデジタル回路で構成することができ、構成の簡略化およびゲイン設定と回転数設定を容易に設定できることを目的とする。
【解決手段】モ―タの回転数は回転指令クロックCLKsetの周期により設定し、第3の基準クロックCLK3および第4の基準クロックCLK4の周波数を変えることにより、PWM基準信号PWMrefと速度偏差Sdifと速度判別信号Sjに応じて得られる速度偏差PWM駆動信号PWMsdifと、位相偏差Pdifと位相判別信号Pjに応じて得られる位相偏差PWM駆動信号PWMpdifのデューティを変更して、モータのPWM駆動信号PWMdrvのゲインを設定する。
(もっと読む)
異常診断装置、画像形成装置およびプログラム
【課題】製造コストを上昇させずに、モータやモータに接続された負荷(例えば、トナー補給機構など)の劣化や異常発生を早急に検知し、二次的な破損が発生する前にモータを停止させることができる異常診断装置を提供する。
【解決手段】モータMの起動時に、回転速度のフィードバック制御を行うための回転速度検出部21から出力される回転速度検出信号を用いてモータMの回転速度(モータMの駆動にかかる制御信号のパルス幅)を基に異常診断部25で異常診断を行うようにする。これにより、モータMの起動時において、モータMやモータMに接続された負荷の劣化や異常発生による負荷トルクの変動があった場合におけるわずかな劣化や異常発生を検知することができるようになるので、モータMの回転開始直後に異常発生判定を行うことができ、二次的な破損が発生する前にモータMを停止させることができる。
(もっと読む)
モータ駆動装置
【課題】可動部が他の部材と接触したことを挟み込みと誤検出することなく、挟み込みを的確に検出できるモータ駆動装置を提供する。
【解決手段】 1個のパルスP1の周期と、次パルスP2の周期との比(P2/P1)を、150回分にわたり積算した値(積分値:150)が、所定しきい値(160)を超えるか否かに基づきシートバックによるによる挟み込みを検出する。このため、シートバックが隣接するシートのシートバックと擦れて、短期間だけ急激にモータ速度の低下する、所謂"セリ"を挟み込みと誤検出せず、実際に挟み込みが起こったことを確実に検出することが可能となる。
(もっと読む)
サーボ制御装置およびこの制御装置の電流検出方法
【課題】本発明は、停止時の電流検出の分解能を上げるとともに、停止時の振動を抑えることができる方法を提供することを目的とする。
【解決手段】ΔΣ方式のA/D変換器による電流検出手段を備えたサーボ制御装置の電流検出方法において、前記サーボ制御装置は、フィルタ10のフィルタリング時間が切替えられる切換手段11を備えたものである。
(もっと読む)
電動機の位置制御装置
【課題】一定加速中にも回転角指令信号と実回転角信号との偏差を小さくする電動機の位置制御装置を得る。
【解決手段】速度フィードフォワード信号演算回路7は、回転角指令信号θmsから速度フィードフォワード信号ωffを算出。機械系模擬回路4は、トルク伝達機構、負荷機械及び直流電動機11を近似し、トルク信号τ2から模擬速度信号ωa及び模擬回転角信号θaを出力。第2の位置制御回路5は、θms及びθaから速度信号ω2を出力。第1の速度制御回路9は、速度信号ω3及び実速度信号ωmからトルク信号τ1を出力。第2の速度制御回路6は、ω2、ωa及びωffからτ2を出力。制御手段は、τ1とτ2に基づいて電動機11のトルクを制御する。
(もっと読む)
信号出力装置および洗濯機
【課題】生産設備に費やすコストの増加や生産効率の低下を防止する。
【解決手段】 マイクロコンピュータ42は、I/O510と、発振回路508と、CPU500とを含む。I/O510は、信号を入力したり出力したりする。発振回路508は、一定の周波数で第1の信号を生成する。CPU500は、I/O510を制御する。I/O510に入力される信号は、第1の物理量に対応する信号を含む。CPU500は、発振回路508が生成したクロック信号の数に基づいて、間隔時間を算出する。CPU500は、第2の物理量に基づいて間隔時間の補正値を算出する。CPU500は、その補正値に対応する信号を出力するように、I/O510を制御する。
(もっと読む)
エンコーダ通信回路
【課題】通信異常発生時にエンコーダに代えて使用して、異常個所を特定するエンコーダ通信回路を提供すること。
【解決手段】エンコーダ20、30により位置情報等をフィードバックして、制御装置10によりサーボモータ16を制御してテーブル17を移動させる加工装置において、エンコーダ20と通信回路装置14との間で通信異常が発生したとき、エンコーダ20に代えてエンコーダ通信回路50を使用して、異常発生個所を特定する。エンコーダ通信回路50は、制御装置10に通信ケーブル13を介して接続されると、予め決められた位置あるいは速度データとアラームデータとからなるエンコーダデータを前記制御装置に出力する。
(もっと読む)
1 - 20 / 29
[ Back to top ]