
Fターム[5H501MM04]の内容
電動機の制御一般 (20,975) | 保護、補償、監視、表示 (962) | 保護 (490) | 過負荷、過速度、速度低下 (77)
Fターム[5H501MM04]に分類される特許
1 - 20 / 77
過大速度制御装置
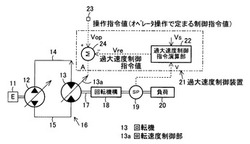
【課題】システム安定性を損なわず、かつ設定回転速度を下げることなく制御できる過大速度制御装置を提供する。
【解決手段】油圧モータ13の容量可変部13aに過大速度制御装置21を連結する。この制御装置21は、回転速度センサ19により検出した回転速度から過大速度制御指令値Vreを演算する過大速度制御指令演算部22と、過大速度制御指令値Vreと操作指令値Vopとの指令偏差を演算して油圧モータ13の容量可変部13aに出力する指令偏差演算部24とを備えている。上記演算部22は、実際のモータ回転速度Vと通常時のモータ設定回転速度Vsとの速度偏差を演算し、実際の速度Vから過大速度制御機能を作動させるONトリガ点と過大速度制御機能を停止させるOFFトリガ点とを判定し、ONトリガ点と判定したときは上記指令値Vreを出力するとともにOFFトリガ点と判定したときは上記指令値Vreの出力を停止する。
(もっと読む)
故障情報伝達装置、およびモータ装置

【課題】簡易に故障状態を知らせることができる故障情報伝達装置、およびモータ装置を提供する。
【解決手段】故障情報伝達装置は、モータおよびモータ駆動装置の少なくとも一方が故障したとき、その故障の種類を伝達する。故障情報伝達装置は、故障が発生したとき、非正弦波形からなる故障識別信号3aを伝達する伝達部を備え、伝達部は、非正弦波形中の波の数、および非正弦波形の休止期間の少なくとも一方を、故障の種類に応じて異ならせる。
(もっと読む)
電動モータスタータ部品の組立
【課題】部品の手作業による組立は、組立コストを著しく増加させ得る。
【解決手段】回路部品のトップダウンアセンブリによって、自動化を増大させ、かつアセンブリを減少させることを可能し、回路部品のロボットによる配置、接続および固定を可能にする、電動モータスタータ300接続パッケージのアッセンブリのシステムおよび方法を含む。接続パッケージは、1つのユニットとしてパッケージされた、電動モータスタータと、任意の過負荷プロテクタを含む。モータスタータは、トライアック、変流器、正温度係数(PTC)素子、抵抗およびコンデンサを有する電気回路を含むことができる。接続パッケージのカバー400およびベース200は、回路基板もしくは充填材料を必要とすることなく、接続された回路素子を囲い、しっかりと固定する。この装置設計は、ハウジングによって包囲された後に、モータスタータ回路および回路素子の迅速なテストを可能にする。
(もっと読む)
圧縮機モータ制御装置
【課題】トルク脈動に対する速度変動により、回転速度・位置推定演算の推定誤差が過大となる状態が発生する。
【解決手段】予め決められた一回転中の複数の各位置において回転速度が限界最低速度を下回った場合の速度補償値を記憶し、記憶された速度補償記憶値により前記複数位置における電流指令を補正する電流指令補正器を備え、回転速度が限界最低速度を下回らないように速度補償を行う。これにより、高調波の影響を抑制し安定した駆動を得られる圧縮機モータ制御装置を提供することができる。
(もっと読む)
駆動装置
【課題】モータの回転動力を作動部に伝達する駆動伝達機構の不具合を装置自身で解消し得るようにする。
【解決手段】演算・制御部11は、動力伝達機構4に不具合が生じたときに動力伝達機構4に衝撃を与えてその不具合を解消するための振動手段16を備えている。振動手段16はモータ6の駆動を開始してから所定時間内にエンコーダ8のカウント数が収束状態にならないときに振動動作を実行するよう構成されている。
(もっと読む)
ドア駆動制御装置及びドア駆動制御方法
【課題】逆転暴走状態を誤認することなく正確に検出可能なドア駆動制御装置、及び、従来よりも安全性を向上させたドア駆動制御方法を提供する。
【解決手段】ドア1の駆動用のモータ2に電力を供給する電力変換器14を備え、ドア1の速度検出値と速度指令値とを用いたフィードバック制御により電力変換器14を運転し、ドア1の速度を制御するドア駆動制御装置に関する。速度検出値を用いてドアの加速度を演算する加速度演算手段と、この加速度演算手段から出力された加速度検出値と前記速度検出値とから所定時間後のドアの速度を予測し、その予測速度が正または負の第3の設定速度を超えた場合に、予測速度異常信号を出力する異常判定手段と、を備える。
(もっと読む)
ハイブリッド式建設機械
【課題】電動モータ、インバータ、蓄電装置等の電動システムが故障して油圧モータ単独で旋回体を駆動する事態が発生した場合でも、電動システムから発生する不測の事故を防止できるハイブリッド式建設機械を提供する。
【解決手段】ハイブリッド式建設機械において、電動モータ25と油圧モータ27の両方を駆動して、旋回体20の駆動を行う油圧電動複合旋回モードと、油圧モータ27のみを駆動して、旋回体20の駆動を行う油圧単独旋回モードとの切替えを行う制御装置80を備え、制御装置80は、電動システムに故障又は異常が発生した場合に油圧単独旋回モードに切り替える制御切替え手段85と、油圧単独旋回モードにおいて、各温度センサからの検出値が予め設定している制限規定値以内になるように油圧モータ27の回転数を制限するために原動機22の回転数を制限制御する監視制御手段84とを備えた。
(もっと読む)
サーボ制御装置および画像形成装置、並びにサーボ制御プログラム
【課題】サーボ機構のジャム判定において、制御対象を駆動する駆動力に対して閾値を設けたジャム判定を実現すること。
【解決手段】駆動体の速度を測定する速度測定部と、前記駆動体を駆動する目標速度を記憶する目標速度保持部303と、電圧制御またはPWM制御を実行する際に、速度測定部により測定された速度と、目標速度保持部に記憶された目標速度との差に応じてDCモータを駆動制御する駆動制御部と、駆動制御部によりDCモータを駆動させた場合に、前記駆動体と異物との干渉によりモータトルクが異常値になったことを検出するモータトルク異常検出部301と、を備え、モータトルク異常検出部301は、DCモータの回転数と電圧またはPWM制御Duty比から算出した値によってモータトルクが異常値であることを検出する。
(もっと読む)
モータ駆動回路
【課題】駆動回路の電源電圧が立上る場合において当該電源電圧が所定電圧より低い期間、拘束保護回路の動作に関わらず、駆動コイルに駆動電流を供給する。
【解決手段】 モータの駆動コイルに駆動電流を供給する駆動回路と、前記駆動回路の動作を制御する制御回路と、前記駆動回路が前記駆動コイルに駆動電流を供給しているにも関わらず、前記モータの回転を示す回転信号が所定期間発生しない場合、前記駆動回路が前記駆動コイルへの駆動電流の供給を停止するように前記制御回路の動作を制御する拘束保護回路と、前記制御回路に対する前記拘束保護回路の制御を禁止する禁止回路と、を備える。
(もっと読む)
電子機器の制御装置、駆動源のトルク出力制限方法及び電子機器
【課題】制御負荷を低減させつつ、駆動源から出力されるトルクの制限制御を適切なタイミングで実行させることができる電子機器の制御装置、駆動源のトルク出力制限方法及び電子機器を提供する。
【解決手段】PF制御部52は、PFモーター14に流れる電流値Iを取得する電流値算出部66と、PFモーター14の目標速度Vtを設定する第1印加電圧設定部65と、PFモーター14の回転速度Vnを検出する回転速度算出部64と、目標速度Vtから回転速度Vnを減算して差分Vsubを取得する差分算出部67と、電流値Iに基づきPFモーター14から出力されるトルクTrを算出するトルク算出部69と、トルクTrが第1制限値を超える場合にはPFモーター14に印加する第2電圧V2を低下させる第2印加電圧設定部71とを備える。トルク算出部69は、差分Vsubが差分閾値KVsub未満である場合にはトルクTrを算出しない。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】エネルギの浪費を抑えつつ、過熱時におけるモータの突然停止を防止し得るモータ制御装置及び制御方法を提供する。
【解決手段】モータの負荷状態に対応したポイント値を設定する。モータの負荷状態を検出し、ワイパモータのモータ負荷ポイントPointFを算出する(S1)。モータ負荷ポイントPointFと閾値A〜Cとを比較し(S3〜S5)、各比較結果に基づいて、モータの回転数を徐々に低下させるエナジー払拭モード(S6)や、間欠払拭動作(S7)、モータ停止(S8)などの過熱保護処理を実行する。過熱保護処理は、モータ負荷ポイントPointFが解除閾値X以下となった場合や、ワイパスイッチがオフされた場合は解除される(S10〜S12)。
(もっと読む)
送風機及び加熱調理器
【課題】送風機の羽根車の汚れを的確に検出して、羽根の汚れの程度が進行する前に予防的に保守することが可能な送風機及び該送風機を備える加熱調理器を提供する。
【解決手段】排気モータ15bを駆動する複数の電圧、即ちPWM制御の相異なるデューティ比に対応付けて、排気モータ15bの回転数の閾値を予めROM72に記憶してあり、排気モータ15bを駆動するときのPWM制御のデューティ比を2秒毎に10%ずつ増加させた場合、回転センサ15cが発生するパルスから夫々のデューティ比に応じて検出した回転数が、ROM72に記憶された回転数の閾値より小さいときに、羽根車の清掃を促す注意喚起を表示器5によって行う。また、上記PWM制御のデューティ比を10%変化させて検出した回転数の増分が、予めROM72に記憶してある増分の閾値より小さいときに、羽根車がロックしていることを示す警報を表示器5から報知する。
(もっと読む)
モータ駆動制御装置
【課題】交流モータのロック時におけるスイッチング素子の損失を的確に低減することにより、スイッチング素子を過熱から好適に保護することのできるモータ駆動制御装置を提供する。
【解決手段】インバータ装置のスイッチング素子T1U、T3V、T5W、T2U、T4V、T6Wの各々にゲート抵抗を介してゲート電圧を印加しつつその変換電力に基づき三相交流モータMの駆動を制御する。そして、この三相交流モータMがロック状態にあるか否かを検知するモータロック検知部100により三相交流モータMのロック状態が検知されることに基づきインバータ装置のシステム電圧を抑制するとともにゲート抵抗の抵抗値を小さい値に変更する。
(もっと読む)
シフトレンジ切換装置、パーキングロック装置、及び係合切換装置
【課題】運転者が操作を行う前に駆動源の異常を検出することができる技術を提供
【解決手段】モータ13が、自動変速機3のシフトレンジを切り換えるためのシフト切換機構12を駆動するための動力源となる。そしてシフトバイワイヤECU15が、自動変速機3のシフトレンジを、シフトレバー2を用いた選択操作に対応したシフトレンジとなるように、モータ13を制御する。さらに、シフトレンジがDレンジである場合には、車両の走行速度が異常判定速度以上であるときに、またシフトレンジがPレンジである場合には、パーキングブレーキが作動し且つイグニッションスイッチ7がオフであるときに、シフトレンジが切り換わらない程度にモータ13を回転させる。すなわち、車両の運転者がシフトレバー2を操作する可能性が低い状況になると、モータ13が異常であるか否かの検出するための動作を実行することができる。
(もっと読む)
電動機の安全装置
【課題】 単純な構造で電動機の停止状態を含む低回転状態を検出できること。
【解決手段】 回転速度センサに、予め設定された値に基づいて所定の周期のトグル信号を発生する信号発生手段と、回転速度信号とトグル信号とに基づいて電動機が低回転状態か否かを判定し、低回転状態を検出した場合は、トグル信号よりも長い予め定められた周期の交流信号を低回転速度信号として出力する低回転速度信号生成手段とを設け、信号伝送回線を介して接続される異常検出手段は、この低回転速度信号を入力して、低回転速度信号が予め定められた周期であった場合のみ、電動機が低回転状態であるとして低回転状態検出信号を出力する。
(もっと読む)
ファン装置
【課題】ファン装置から異常騒音が発生していることが想定される状態を検知して、ファン装置の異常検出を正確に行う。
【解決手段】ファン装置のインペラ部302に磁石303を取り付け、対向部にホール素子304を配置し、ホール素子によってインペラ部の回転制御と位置の変動具合を検出することで、ファン装置の異常騒音の要因である振動を検知する。インペラ部302の位置の変動具合によって、ファン装置が異常であると検知した場合には、ファン装置の駆動を停止したり、低速で駆動することにより正常な状態に復帰させるように試みる。また、ユーザに異常を知らせる。
(もっと読む)
保護機能を備えた電動機制御装置
【課題】簡易な構成でアラーム停止を回避できる保護機能を備えた電動機制御装置を得ること。
【解決手段】コントローラから指令ないしは起動信号を受け取り、各種の機械を駆動するモータを制御し、前記コントローラへ動作完了信号を出力する電動機制御装置において、実効負荷率もしくは当該電動機制御装置と前記モータと前記機械との少なくともいずれか一つの温度に関する物理量を観測或いは推測し、過負荷になる可能性が高いと判断した場合に、前記コントローラから次の指令ないしは起動信号を受け取ってから、動作完了信号を前記コントローラに出力するまでの間における待機時間を引き延ばす過負荷回避動作を行う構成を備えた。
(もっと読む)
保護機能を備えた電動機制御装置
【課題】簡易な構成でアラーム停止を回避できる保護機能を備えたモータ制御装置を得ること。
【解決手段】各種の機械を駆動するモータに供給する電流の制御を行うトルク制御部を含むマイナーループを有するモータ制御装置において、実効負荷率もしくは当該モータ制御装置と前記モータと前記機械との少なくともいずれか一つの温度に関する物理量を観測或いは推測し、過負荷になる可能性が高いと判断した場合に、前記実効負荷率を下げる方向に、前記トルク制御部の入力側経路に存在する制御系の制御応答性を変更する過負荷回避動作を行う構成を備えた。
(もっと読む)
スイッチトリラクタンスモータ制御方法およびその装置
【課題】回転子の回転位置の推定精度を高く維持する。
【解決手段】回転位置推定相を決定する推定相決定部61と、決定された回転位置推定相における巻線電流iを選択する推定相電流選択部62と、選択された巻線電流i、インバータにおける直流電圧VdcおよびPWMパターンを入力として、決定された回転位置推定相における磁束鎖交数λを算出する推定相磁束鎖交数算出部63と、選択された巻線電流iおよび算出された磁束鎖交数λを入力として回転位置推定演算を行って第1推定回転位置θMを出力する位置推定演算部64と、過去の推定回転位置と過去の回転速度に基づいてバックアップ回転位置としての第2推定回転位置θpを算出するバックアップ位置算出部65と、第1推定回転位置θMまたは第2推定回転位置θpを選択して最終的に得られた推定回転位置θeとして出力する推定回転位置選択部66とを有している。
(もっと読む)
車両用可動体駆動装置
【課題】簡易な構成で、モータの作動終了後の熱量をより正確に推定することができ、ひいては該モータの作動が徒に制限されることを回避できる車両用可動体駆動装置を提供する。
【解決手段】シートバック3(リクライニング機構4)を回動駆動するモータ6と、該モータ6に流れる電流を検出する電流検出部12と、モータ6に流れる電流及び該モータ6の作動時間に基づいて該モータ6の作動ごとの熱量を演算する熱量演算部14と、該熱量を積算する熱量積算・減算部15とを備え、積算された熱量が所定閾値を超えることでモータ6の作動を制限する。熱量積算・減算部15は、モータ6の作動終了後の経過時間に応じて、積算された熱量を段階的に減算する。この際、熱量積算・減算部15は、モータ6の作動終了後の経過時間が短いときほど、積算された熱量を減算するときの単位時間あたりの減算量を大きく設定する。
(もっと読む)
1 - 20 / 77
[ Back to top ]