
Fターム[5H505CC02]の内容
交流電動機の制御一般 (51,584) | 電源 (3,035) | 直流電源を用いるもの (1,926) | 電池を用いるもの (1,375)
Fターム[5H505CC02]の下位に属するFターム
太陽電池を用いるもの (10)
2次電池を用いるもの (983)
Fターム[5H505CC02]に分類される特許
1 - 20 / 382
鞍乗型車両
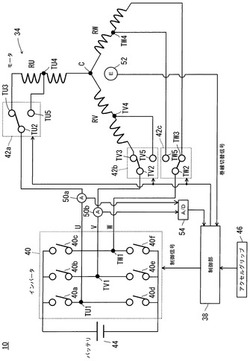
【課題】インバータの大型化を抑えつつインバータの故障を防止できかつモータの巻線を円滑に切り替えることができる、乗り心地の良い鞍乗型車両を提供する。
【解決手段】自動二輪車10は、切り替え可能な巻線を有するモータ18と、アクセルグリップ22と、アクセルグリップ22からの指示に基づいて制御信号を出力する制御部20と、制御部20からの制御信号に基づいてモータ18に出力電圧を供給するインバータ14と、巻線を切り替えるスイッチ16a〜16cと、モータ電流を検出する電流センサ24a,24bと、モータ18の位相を検出するエンコーダ26とを備える。制御部20は、巻線の切り替え条件が成立したとき、アクセルグリップ22からの指示に係わらずモータ電流が0になるように、モータ電流とモータ18の位相とに基づいてインバータ14のデューティー比を調整する。デューティー比調整期間中に巻線を切り替える。
(もっと読む)
モータ制御装置およびそれを用いた電動パワーステアリング装置

【課題】複数相のモータを制御するモータ制御装置において、対象とする相に開放状態の故障が発生した場合に、いずれの相に開放状態の故障が発生したか否かを、迅速かつ正確に検知するモータ制御装置およびそれを用いた電動パワーステアリング装置を得る。
【解決手段】電源電圧Vbが所定電圧Vthr以上、かつ、モータ回転速度ωが所定速度ωthr以下、かつ、対象とするx相電圧指令Vx*がゼロ付近でなく、かつ、対象とするx相の電流Ixが所定電流Iu_thr以下、かつ、制御誤差が所定誤差以上である状態が所定時間以上検出された場合に、対象とするx相に開放状態の故障が発生したと判定する。
(もっと読む)
交流電動機の制御装置および制御方法
【課題】簡易な制御によって、高トルク領域からトルクを減少させる際のトルク追従性を高めることが可能な交流電動機制御を実現する。
【解決手段】インバータ14は、矩形波電圧制御モードでは、制御装置30からの制御信号S3〜S8に応答して、電力線7上の直流電圧を、矩形波電圧に変換して交流電動機M1へ印加する。制御装置30は、交流電動機M1の出力トルクがトルク指令値Tqcomと一致するように、矩形波電圧の位相を制御する。制御装置30は、交流電動機のトルクが高トルク領域においてトルクを減少する場合には、電圧位相の上限ガード値を通常時からトルク減少方向に変化させる。これにより、電圧位相の変化量が強制的に確保される。
(もっと読む)
電気自動車のスイッチング装置及びその制御方法
【課題】本発明は、電気自動車のスイッチング装置及びその制御方法を提供する。
【解決手段】本発明の実施例による電気自動車のスイッチング装置は、第1又は第2スイッチング信号を受信し、受信された第1又は第2スイッチング信号のうち既に選択された電気自動車の動作モードに従っていずれか一つの信号を出力する信号選択部(260)と、前記信号選択部から出力されるスイッチング信号に従って電源を直流−交流変換して出力するインバータ(220)と、前記電気自動車の動作モード選択信号を感知し、選択された動作モードに従って前記信号選択部で第1又は第2スイッチング信号を選択するための制御信号を生成する制御機(270)と、を含む。
(もっと読む)
モータ制御装置
【課題】電源電流指令値に基づいてブラシレスモータを電流制御で駆動する場合に、外乱に対するロバスト性を向上させることができるモータ制御装置を提供する。
【解決手段】q軸電流指令値演算手段21,22は、ロータが電気角で360°回転する毎に、電源電流検出値IPと電源電流指令値IP*との偏差に基づいてq軸電流指令値Iq*を演算する。そして、電圧指令値演算手段23,24,26,27は、所定の演算周期Ts毎に、q軸電流指令値演算手段21,22によって決定されたq軸電流指令値Iq*とq軸電流検出値Iqとの偏差および所定のd軸電流指令値Id*とq軸電流検出値Idとの偏差に基づいて、q軸電圧指令値Vq*およびd軸電圧指令値Vd*とを演算する。この電圧指令値Vq*,Vd*に基づいてモータ1が駆動される。
(もっと読む)
モータの制御装置
【課題】少なくとも1つの相に温度センサが設けられ、少なくとも1つの相に温度センサが設けられていない多相のモータにおいてコイルの保護処理を適切に実行する。
【解決手段】少なくとも1つの相(V相)に温度センサ72が設けられ、少なくとも1つの相(U相及びW相)に温度センサ72が設けられていない多相のモータMG2に対して、モータMG2に電流が流れ、回転が止められている状態であるモータロック時において、温度センサ72が設けられている相(V相)に流れる電流の絶対値が、温度センサ72が設けられていない相(U相及びW相)に流れる電流の絶対値以上となる回転位相範囲となるようにモータMG2の回転子をずらすモータの制御装置とする。
(もっと読む)
回転機の制御装置
【課題】ブートストラップ回路を用いたシステムにおいて、モデル予測制御を適用する場合、高電位側のドライブユニットDUの電源となるコンデンサC*(*=u,v,w)の電圧が低下することで、高電位側のスイッチング素子S*pを適切に駆動することができなくなるおそれがあること。
【解決手段】制御装置20は、モデル予測制御によって、インバータINVの8通りの操作状態のうち、制御量とその指令値との差を最小とする操作状態を選択し、これに基づき、インバータINVを操作する。ただし、低電位側のスイッチング素子S*nのオフ状態が所定期間継続すると、強制的にスイッチング素子Sun、Svn,Swnをオン状態とする。
(もっと読む)
モータ制御装置
【課題】過渡時におけるロータ位置の検出精度を向上させる。
【解決手段】同期モータ12のロータ位置をセンサレスで検出する機能を備えたモータ制御装置10であって、誘起電圧波高値Ep、電流電気角θiから誘起電圧電気角θeを減じた減算値(θe−θi)の2つのパラメータで規定される電流位相βを予め記憶する位相記憶部と、これに記憶されたβを参照することにより、電流極座標変換部26で検出されたθi、並びに、誘起電圧極座標変換部28で検出されたEp及びθeに基づいて、βを選定する位相選定部と、このβを第1の変数とし前記検出されたθiを第2の変数とするロータ計算式からロータ位置θmを算出するロータ位置演算部と、を含むロータ位置検出部30を備えて成る。そして、位相選定部においてβを選定するときに、前記検出されたEp及びθeを、コイルに流れる電流の変化に応じて補正する補正部32を更に備えたものである。
(もっと読む)
電動パワーステアリング装置
【課題】モータ制御の安定性を好適に維持しつつ、効果的にモータ電流を抑制することのできる電動パワーステアリング装置を提供すること。
【解決手段】第2制御部は、目標操舵トルクτ*に実際の操舵トルクを追従させるべく、トルク偏差Δτに基づくトルクフィードバック制御を実行することにより制御上の仮想的な回転角を演算する。また、第2制御部は、トルク偏差Δτに基づくγ軸電流増減値ηを演算し、当該γ軸電流増減値ηを積算することによりγ軸電流指令値Iγ*を演算する。そして、上記制御上の回転角に従う回転座標系において電流フィードバック制御を実行する。更に、第2制御部(電流指令値演算部61)は、上記γ軸電流指令値Iγ*を電流指令上限値以下に制限する電流指令値制限部73を備える。そして、当該電流指令値制限部73は、上記トルク偏差Δτに基づいて電流指令上限値を変更する。
(もっと読む)
電動パワーステアリング装置
【課題】モータ制御の安定性を損なうことなく、効果的にモータ電流を抑制することが可能な電動パワーステアリング装置を提供すること。
【解決手段】電流指令値演算部61は、γ軸電流指令値Iγ*の上限値(電流指令上限値Ilim)を演算する電流指令上限値演算部73と、γ軸電流指令値Iγ*を電流指令上限値Ilim以下に制限する電流指令値制限部74とを備える。そして、電流指令上限値演算部73は、車速Vが速いほど、より低い値となるように電流指令上限値Ilimを変更(演算)する。
(もっと読む)
交流回転機の制御装置
【課題】速度制御系の機械的応答で制約されていたトルクの応答性を改善できる交流回転機の制御装置を提供する。
【解決手段】交流回転機2へ交流電圧を出力する電力変換手段3と、交流回転機2に流れる電流を検出する電流検出手段4と、検出電流を回転二軸座標上の電流へ変換する電流演算手段5と、回転二軸座標上の電流に基づいて交流回転機2が出力する出力トルクを演算するトルク演算手段8と、トルク指令と出力トルクとの偏差に基づいて周波数指令を演算する周波数指令演算手段9と、周波数指令を補正する周波数補償量をトルク指令に基づいて演算する補償器10と、補正後の周波数指令に基づいて回転二軸座標上に設定した制御座標軸の位相を演算する位相演算手段6と、補正後の周波数指令と制御座標軸の位相とに基づいて電力変換手段に出力する電圧指令を演算する電圧指令演算手段7を備える。
(もっと読む)
回転電機制御装置
【課題】弱め界磁制御の限界点を超えた後も含め、幅広い駆動条件に対して、高い運転効率で回転電機を駆動制御する。
【解決手段】ロータと同速で回転する回転座標系に対応した電流指令を電流指令マップに基づいて決定する電流指令決定部は、電圧不足割合VRがゼロ以下の場合には、目標トルクに応じた等トルク線CTと基本制御線MTとの交点に電流指令を決定し、電圧不足割合VRがゼロ以上の場合には、目標トルクに応じた等トルク線CTに沿って電圧不足割合VRの増加に伴い限界トルク線LTへ向かう点に電流指令を決定し、電圧不足割合VRの増加により目標トルクに応じた等トルク線CTに沿った電流指令が限界トルク線LTに達した場合には、限界トルク線LTに沿って電圧不足割合VRの増加に伴い電圧制限楕円LVの中心へ向かう点に電流指令を決定する。
(もっと読む)
電流検出装置
【課題】回路に流れる電流をより適正に検出できるようにする。
【解決手段】電流センサから出力されるべき電圧としての想定出力電圧Vw*に対する電流センサからの実出力電圧Vwのズレ量としての検出ずれΔVwとセンサ温度Twとに基づいてW相検出ずれマップのヒストグラムを更新し(S120)、更新したヒストグラムでの最大頻度検出ずれに基づいて補正値αwを設定し(S130)、設定した補正値αwを実出力電圧Vwに加えて求めた補正後出力電圧Vwmoを電流値に変換することによってW相の相電流Iwを算出する(S140,S150)。
(もっと読む)
インバータ装置及び電動工具
【課題】 インバータ装置及び電動工具を提供する。
【解決手段】
インバータ装置1は、設定された導通角により直流電力を交流電力に変換してACモータ31に出力するインバータ回路16と、ACモータ31にかかる負荷を検出する電流検出抵抗17と、電流検出抵抗17により検出された負荷に応じて導通角を変化させる制御部19と、を備えている。これにより、ACモータ31にかかる一時的な過負荷に対応可能となる。
(もっと読む)
モータ制御装置
【課題】永久磁石同期モータのセンサレス制御の安定性を向上することができるモータ制御装置を提供する。
【解決手段】相電圧設定手段は、モータ及びインバータの少なくとも何れか一方の器差を有するパラメータに基づいた電流位相誤差範囲を含む実電流位相領域を規定し、センサレス制御にてロータ位置を検出可能な安定運転電流位相領域を規定し、実電流位相領域が安定運転電流位相領域内となるように、電流ベクトル制御により設定された電流に、回転数検出手段で検出された回転数に応じた所定の位相差を加えたものを目標電流として設定する。
(もっと読む)
回転機の制御装置
【課題】高周波電圧信号を小さくすると、電気角の推定精度が低下すること。
【解決手段】高周波電圧信号設定部50では、高周波電圧指令信号を設定する。操作信号生成部22では、これに基づきインバータの操作信号g*#(*=u,v,w;#=n,p)を設定する。一方、ハイパスフィルタ58は、モータジェネレータを流れる電流id,iqから高周波電流信号idh,iqhを抽出する。外積演算部60は、高周波電圧指令信号と高周波電流信号との外積値を算出する。これがゼロとなるように回転角度θが操作される。高周波電圧指令信号と指令電流とが直交する設定を採用する。
(もっと読む)
電力変換装置
【課題】スイッチング損失を抑制できる電力変換装置を提供する。
【解決手段】電力変換装置140において、制御回路172は、モータジェネレータ192の回転状態に応じた電気角ごとのパルス波形を表すPHMパルスを、U相、V相、W相の各相について生成する。そして、生成した各相のPHMパルスに基づいて、U相、V相、W相のうちPHMパルスの電圧値が他の2相とは異なるいずれか1相を特定し、その特定した1相について、PHMパルスの電圧値を所定のゼロベクトルトリガ信号の周期ごとに反転させ、その反転後のPHMパルスおよび他の2相のPHMパルスに基づくゼロベクトル再配置型PHMパルス信号を、制御信号としてドライバ回路174へ出力する。
(もっと読む)
電動パワーステアリング装置
【課題】モータ駆動回路のMOS−FETの保護手段が異常となっても、モータ駆動回路のMOS−FETの動作を確実に停止できる電動パワーステアリング装置を提供する。
【解決手段】モータ駆動中にトランジスタ31の出力の短絡故障が検出されると、マイコン5はイネーブル信号ENBをオフし、FET20がオフ状態となることによって、モータ駆動回路7のMOS−FET(U2)のゲートがプリドライバ6のモータ駆動信号から遮断される。同時に、MOS−FET(U2)のゲート電荷は抵抗32,30,トランジスタ31のコレクタ−エミッタを通して放電されることによってゲート電圧が低下し、MOS−FET(U2)を短時間でオフできる
(もっと読む)
インバータ装置及びそれを備えた電動工具
【課題】 インバータ装置を提供する。
【解決手段】 インバータ装置1は、インバータ回路16と、電流検出抵抗17と、インバータ回路停止部20と、を備えている。インバータ回路16は、直流電力を交流電力に変換して出力する。電流検出抵抗17は、前記インバータ回路に流れる電流の電流値を検出する。インバータ回路停止部20は、前記電流値が過電流閾値を上回った場合にインバータ回路16からの交流電力の出力を停止させる。
(もっと読む)
同期モータ制御装置および制御方法
【課題】安価な構成で、モータ出力容量が大きく、かつ低振動、低騒音で同期モータを駆動する制御装置およびその制御方法を提供する。
【解決手段】同期モータを駆動するための可変電圧・可変周波数の3相交流電圧を出力する3相インバータと、それを制御するモータ制御手段と、を備えた同期モータ制御装置であって、さらに前記同期モータに含まれる5次高調波の含有率を設定する高調波設定回路を有し、前記モータ制御手段は、前記3相インバータの出力電圧演算部と、高調波含有率を検出し設定する高調波含有率設定部と、前記高調波含有率設定部で設定された高調波含有率と前記出力電圧とから5次高調波電圧指令を演算する高調波信号形成部と、前記出力電圧と前記5次高調波電圧指令とから5次高調波を重畳させた出力電圧指令を演算する信号波形成部と、前記出力電圧指令に従い前記3相インバータの駆動信号を生成する駆動信号形成部と、を備えた。
(もっと読む)
1 - 20 / 382
[ Back to top ]