
Fターム[5H505DD05]の内容
交流電動機の制御一般 (51,584) | 電動機の種類 (6,219) | 誘導電動機 (1,107)
Fターム[5H505DD05]に分類される特許
1 - 20 / 1,107
モータ制御装置
電動機から発生する電磁音を制御する方法
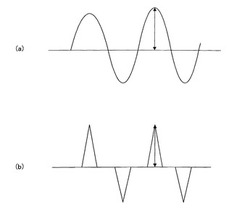
【課題】消費電力を低減しつつ、所望の周波数を有する電磁音を所望の大きさで電動機から発生させる。
【解決手段】交流電動機、前記交流電動機に交流電力を供給する電力供給手段、及び前記電力供給手段を制御して前記交流電動機の相コイルに流れる電流を調節する制御手段を備える動力装置において、前記交流電動機に対するトルク電圧指令値Vq*及び励磁電圧指令値Vd*の少なくとも何れか一方の電圧指令値に周期的な変動を加えることにより所望の周波数及び音量を有する電磁音を前記交流電動機から発生させるに当たり、前記電圧指令値の増大方向への変動と減少方向への変動とが連続して起こる変動パターンに従って前記電圧指令値に変動を加えることにより、前記交流電動機の相電流において、同じ周期及び振幅を有する正弦波と比較して、より小さい電流実効値及びより多くの周波数成分を有する波形を生じさせる。
(もっと読む)
電力変換装置、電動機駆動装置及び空気調和機

【課題】PWM制御時のスイッチング損失を低減させ、高効率な電力変換装置,電動機駆動装置および空気調和機を提供する。
【解決手段】電力変換回路4は、パルス制御部7から出力されたパルス信号7Aによるスイッチング動作によってPWM制御を行い、交流電動機3へ交流電力を出力している。このとき、ベクトル制御部8が、相電流検出部6からの相電流情報6Aに基づいて算出した電流の位相情報8Aをパルス停止制御部9へ出力する。パルス停止制御部9は、電流の位相情報8Aに基づいて生成した相パルス停止制御信号9Aをパルス幅判定部12へ出力する。パルス幅判定部12は、パルス幅が一定の値以下とならないパルス起動/停止指令12Aをパルス制御部7へ出力する。これにより、パルス制御部7は、電力変換回路4の所定の相の電流位相のゼロクロスを基準として所定の区間のパルス信号7Aを停止する。
(もっと読む)
電動機から発生する電磁音を制御する方法
【課題】所望の周波数を有する電磁音を所望の大きさで電動機から発生させる方法を提供する。
【解決手段】交流電動機と、前記交流電動機に交流電力を供給する電力供給手段と、前記電力供給手段を制御して、前記交流電動機の相コイルに流れる電流を調節する制御手段と、を備える動力装置において、
前記交流電動機に対するトルク電圧指令値Vq*及び励磁電圧指令値Vd*の少なくとも何れか一方の電圧指令値に周期的な変動を加えることにより、所望の周波数及び音量を有する電磁音を前記交流電動機から発生させる。
(もっと読む)
インバータ装置
【課題】速度センサレス制御により電動機を駆動するものにおいて、フリーラン状態の電動機の回転速度を精度良く同定することができるインバータ装置を提供する。
【解決手段】本実施形態のインバータ装置は、電動機の回転速度を検出する速度検出手段を用いることなく速度センサレス制御により電動機を駆動する電動機制御部を備えたインバータ装置である。電動機制御部は、電動機がフリーラン状態であるときの回転速度を所定のパラメータを用いた条件に基づいて同定する速度サーチ機能と、電動機を実際の運転条件に基づいて運転させながらパラメータをティーチングするティーチング機能とを有する。
(もっと読む)
モータ制御装置、歩行補助装置及びモータ制御方法
【課題】モータコイルの過熱を防止するモータ制御装置において、コイル温度が上限を超えないことを保証しつつ、コイル温度の上限を保証上限温度に十分近い値に設定して、コイル電流の制限に因るモータ性能の低下を抑止する。
【解決手段】上限電流算出部15は、温度センサ6u,6v,6wが検出した各相コイルの温度に基づいて各相において第1の所定時間後のコイル温度が上限温度以下に留まる上限値を、第1の所定時間より短い第2の所定時間の経過ごとに算出する。ベクトル処理部16は、目標コイル電流に対応する目標ベクトルの長さを、上限電流算出部15が算出した各相の上限値の内の最小のものに対応する長さ以内になるように補正する。相電流変換部17は、補正後の目標ベクトルに基づいて各相電流値を算出し、インバータ3を介してモータ2の各相電流を制御する。
(もっと読む)
液体抵抗器の劣化診断装置
【課題】この発明は、液体抵抗器の劣化診断装置に関し、液体抵抗器の劣化を、機器を分解することなく判断することのできる液体抵抗器の劣化診断装置を提供することを目的とする。
【解決手段】巻線形誘導電動機の速度を検出する速度センサと、前記巻線形誘導電動機の二次回路に接続され前記巻線形誘導電動機の起動に際し電極間距離を徐々に縮めることによりその抵抗値を下げる液体抵抗器と、前記電極間距離が最小となったときに前記速度センサにより検出される電動機速度が速度基準値を下回るか否かを判定する電動機速度判定手段と、前記電動機速度が前記速度基準値を下回る場合にアラーム信号を出力するアラーム信号出力手段とを備える。
(もっと読む)
誘導電動機の回転子時定数推定装置
【課題】本発明は、周辺環境または運転条件の影響を少なく受けて、常に一定水準のトルクを発生する誘導電動機の回転子時定数推定装置を提供する。
【解決手段】本発明は、d軸電流指令及びq軸電流指令を受信して、q軸電圧指令を出力し、q軸電圧推定値を出力して、前記q軸電圧指令と前記q軸電圧推定値との差である回転子時定数の変動値を出力し、前記回転子時定数の変動値を回転子時定数に加算して、変更された回転子時定数を出力する。
(もっと読む)
車両駆動用誘導電動機の制御装置
【課題】トルク推定の精度を向上させることができる、車両駆動用誘導電動機の制御装置。
【解決手段】上位コントローラ110から入力されるトルク指令Tmrefおよび二次磁束指令φ2refに基づいて、車両駆動用誘導電動機108を高周波駆動するインバータ107に制御信号を出力するモータコントローラ109は、インバータ107の駆動周波数ω1を設定する一次周波数演算部219と、誘導電動機108の三相電流値を検出するモータ電流値検出部209と、検出された三相電流値をd軸電流値Idおよびq軸電流値Iqに変換する座標変換部223と、誘導電動機108の出力トルクを推定するトルク推定部211と、を備え、トルク推定部211は、モータ電流値検出部209による電流検出からトルク推定までの電流位相変化を補正する位相補償量と、d軸電流値およびq軸電流値とに基づいて、出力トルクTmを推定する。
(もっと読む)
電動機の駆動方法および駆動装置
【課題】電動機の損失を最小化することができる電動機の駆動方法および駆動装置を提供する。
【解決手段】第1時刻から所定時間経過した第2時刻において目標回転速度ω*となるように電動機を駆動させる電動機の駆動方法であって、目標回転速度ω*を設定する目標設定ステップ(S1)と、電動機の入出力特性から得られたマップにおいて、第1時刻の動作点と、第2時刻の動作点と、第1時刻と第2時刻の間の時刻における複数の動作点とで構成された初期軌道L1を決定する初期軌道決定ステップ(S2、S3)と、初期軌道L1を構成する全動作点における損失の和が最小(または効率の和が最大)となるように、マップに基づいて最適化を行って目標軌道L2を導出する目標軌道導出ステップ(S4〜S7)と、目標軌道L2に従ってトルクおよび回転速度を制御する制御ステップと、を含むことを特徴とする。
(もっと読む)
インバータ装置及びインバータ装置のティーチング方法
【課題】機械式ブレーキを備えるモータ駆動システムについてブレーキ開遅れ時間を得るためのティーチング動作を行う場合に、より精度が高い結果を得る。
【解決手段】実施形態のインバータ装置によれば、設定手段は、制御部がモータの起動に伴って実行するブレーキの開制御をモータの可変速制御と連携して行なう際に、インバータ回路を介して検出される相電流に基づき演算により推定したモータの回転周波数の変化に基づき機械式ブレーキの開制御に使用されるブレーキ制御データを設定する際に、モータが停止して機械式ブレーキが閉じた状態で出力トルクを上昇させるよう制御部に指令を与え、推定されるモータの回転周波数の平均値を求め、その平均値に前記回転周波数の所定の変化分を加えたものを判定周波数として設定する。そして、ブレーキ開指令を出力するとブレーキ開遅れ時間の計測を開始し、モータの回転周波数が判定周波数以上になるまでの時間をブレーキ開遅れ時間として計測し当該時間を記録する。
(もっと読む)
モータ制御装置、モータ制御方法
【課題】モータを精度良く制御することを可能にするモータ制御装置、及びモータ制御方法を提供することを目的としている。
【解決手段】電流指令値から、電圧指令値を生成し、モータに流れる検出電流によりフィードバック制御するモータ制御装置であって、モータが一定速度で回転されているとき、d軸電流指令値及びq軸電流指令値を各々零に設定する補正制御部と、電流指令値と検出電流との偏差の積分値を生成する電流制御部と、生成された積分値を測定する積分値測定部と、を備え、補正制御部は、測定された積分値が予め定められている範囲内の値となるように調整することで前記モータの回転位置に対する補正値を調整する。
(もっと読む)
回生型高圧インバータ
【課題】本発明は、従来の直列型H−ブリッジ高圧インバータに回生運転が可能な能動整流部を有する回生型単位電力セルを混合して、部分的な回生運転ができるようにする部分回生型高圧インバータを提供する。
【解決手段】本発明によるインバータは、直列型H−ブリッジ高圧インバータの単位電力セルの入力端構造を変更して回生運転が可能にし、制動抵抗(dynamic braking resistor)を要しないため、DCリンクキャパシタのサイズを従来の高圧インバータより減らすことができる。
(もっと読む)
油圧ユニット
【課題】油圧ユニットに誘導モータを用いた場合であっても、油圧ユニットの運転効率及び運転応答性の両方が低下しないようにする。
【解決手段】油圧ユニット(10)に、誘導モータ(12)の回転速度に応じて効率優先動作と応答優先動作とを切り換えながら誘導モータ(12)をインバータ(13)を介してベクトル制御で制御する制御部(1)を設ける。
(もっと読む)
油圧ユニット
【課題】油圧ユニットに誘導モータを用いた場合であっても、油圧ユニットの運転効率及び運転応答性の両方が低下しないようにする。
【解決手段】油圧ユニット(10)に、誘導モータ(12)の回転速度に応じて効率優先動作と応答優先動作とを切り換えながら誘導モータ(12)をインバータ(13)を介してベクトル制御で制御可能な制御部(1)を設ける。
(もっと読む)
高圧インバータの瞬時停電補償方法及びこれを利用した高圧インバータシステム
【課題】本発明は、高圧インバータで瞬時停電が生じる場合、負荷が保存している機械的運動エネルギーを電気的エネルギーに変換して停電区間に対応することによって、高圧インバータが停止せずに運転し続けるようにする瞬時停電補償方法及びこれを利用した高圧インバータシステムを提供することを目的とする。
【解決手段】本発明では、直列連結されて電動機に供給する一つの相電圧を構成する複数の電力セルを備える高圧インバータにおいて、複数の電力セルの入力電圧が基準値以下の場合、該当時点で前記複数の電力セルの出力周波数を所定値だけ減少させ、所定の減速勾配で出力周波数を減少させた後、入力電圧が復帰する場合、復帰時出力周波数を所定時間だけ維持する。
(もっと読む)
車両操舵装置の制御装置
【課題】消費電力を低減することができる車両操舵装置の制御装置を提供する。
【解決手段】車両操舵装置1は、互いに異なる巻数の界磁部を用いてステアリングシャフト35にトルクを付与する電動モータ51と、ステアリングホイール12の操作にともないステアリングシャフト35に入力されるトルクである操舵トルクに応じて電動モータ51のトルクを制御する制御装置67とを備えている。制御装置67は、操舵トルクに応じて、電動モータの各界磁部の少なくとも一方に供給するモータ電流を制御する。
(もっと読む)
モータ制御装置
【課題】加速・減速や負荷トルク変動を含む広い動作領域で、磁束指令に対する磁束の追従遅れを補正し、所定のトルクを出力させ、加速性能および制御性能の向上が図れるモータ制御装置を得ること。
【解決手段】外部から入力される磁束指令Φcomと磁束推定部8が推定した推定磁束ΦSとの偏差が小さくなるようにする励磁電流指令を生成する磁束制御器13を備え、誘導モータ1をベクトル制御により駆動制御するモータ制御装置において、磁束指令Φcomに基づいて磁束遅れ補正指令Φhcomを生成する磁束遅れ補償器16aを設け、磁束遅れ補正指令Φhcomは、減算器20において磁束指令Φcomに代えて磁束推定部8が推定した推定磁束ΦSとの偏差を取るのに用いる。
(もっと読む)
回転電機制御装置
【課題】制御装置の演算負荷の増加を抑制しつつ、エイリアシングに起因して検出される周波数成分が、電流フィードバック制御に与える影響を抑制して、回転電機を制御する。
【解決手段】交流周波数成分を含む実電流をサンプリングして検出電流を取得するサンプリング周期STを設定するサンプリング周期設定部と、サンプリング周期STに応じて実電流をサンプリングして検出電流を取得する電流サンプリング部と、所定の周波数領域の周波数成分の入力に応答するように応答領域Rが設定され、検出電流と目標電流とに基づいて電流フィードバック制御を行う電流制御部とを備え、サンプリング周期設定部は、エイリアシングに起因して検出される検出電流の複数のエイリアシング周波数の少なくとも1つが、電流制御部の応答領域R外となるように、回転電機の回転速度に応じてサンプリング周期STを設定する。
(もっと読む)
モータ制御装置
【課題】トルク応答性の遅れを抑制するモータ制御装置を提供する。
【解決手段】モータ10の回転速度を検出するモータ回転速度検出手段と、外部から入力されるトルク指令値及び前記回転速度に基づき、所定の上限電流値の範囲内である、第1の励磁電流指令値及びトルク電流指令値をそれぞれ演算する電流指令値演算手段と、前記第1の励磁電流指令値の位相を進めて第2の励磁電流指令値を演算することで、前記モータのロータ磁束の遅れを補償する補償手段と、前記上限電流値及び前記トルク電流指令値に基づいて、前記励磁電流指令値の上限値である上限励磁電流指令値を演算する上限励磁電流指令値演算手段と、前記第2の励磁電流指令値を、前記上限励磁電流指令値以下に制限することで、第3の励磁電流指令値を演算する励磁電流指令値制限手段と、前記第3の励磁電流指令値及び前記トルク電流指令値に基づいて前記モータを制御するモータ制御手段と、を備える。
(もっと読む)
1 - 20 / 1,107
[ Back to top ]