
Fターム[5H505DD06]の内容
交流電動機の制御一般 (51,584) | 電動機の種類 (6,219) | 同期電動機 (2,591)
Fターム[5H505DD06]の下位に属するFターム
Fターム[5H505DD06]に分類される特許
1 - 20 / 1,078
環境に優しい車両用レゾルバの異常出力補償方法
プレス機械の電源装置
回転電機システム
インバータ用短絡故障検出装置及びモータ制御装置
電力変換装置、電動機駆動装置及び空気調和機
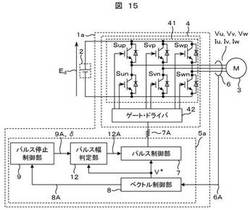
【課題】PWM制御時のスイッチング損失を低減させ、高効率な電力変換装置,電動機駆動装置および空気調和機を提供する。
【解決手段】電力変換回路4は、パルス制御部7から出力されたパルス信号7Aによるスイッチング動作によってPWM制御を行い、交流電動機3へ交流電力を出力している。このとき、ベクトル制御部8が、相電流検出部6からの相電流情報6Aに基づいて算出した電流の位相情報8Aをパルス停止制御部9へ出力する。パルス停止制御部9は、電流の位相情報8Aに基づいて生成した相パルス停止制御信号9Aをパルス幅判定部12へ出力する。パルス幅判定部12は、パルス幅が一定の値以下とならないパルス起動/停止指令12Aをパルス制御部7へ出力する。これにより、パルス制御部7は、電力変換回路4の所定の相の電流位相のゼロクロスを基準として所定の区間のパルス信号7Aを停止する。
(もっと読む)
モータ制御装置、および空気調和機

【課題】三相インバータ回路に係る電圧指令と電流指令との位相差が大きい場合であっても、スイッチング損失を低減することができるようにする。
【解決手段】モータ制御装置11は、直流電源13に接続された二相変調方式の三相インバータ回路17と、三相インバータ回路17を用いて三相同期モータ15のベクトル制御を行うベクトル制御部19と、を備える。ベクトル制御部19は、二相変調に係る固定相の区間を、d軸q軸の電圧ベクトルの位相を用いて決定する第1の制御モード、および、d軸q軸の電流ベクトルと電圧ベクトルとの位相差を用いて決定する第2の制御モードを有し、第1の制御モードと第2の制御モードとのいずれかを切り替えて用いて三相同期モータ15のベクトル制御を行う。
(もっと読む)
モータ制御装置、歩行補助装置及びモータ制御方法
【課題】モータコイルの過熱を防止するモータ制御装置において、コイル温度が上限を超えないことを保証しつつ、コイル温度の上限を保証上限温度に十分近い値に設定して、コイル電流の制限に因るモータ性能の低下を抑止する。
【解決手段】上限電流算出部15は、温度センサ6u,6v,6wが検出した各相コイルの温度に基づいて各相において第1の所定時間後のコイル温度が上限温度以下に留まる上限値を、第1の所定時間より短い第2の所定時間の経過ごとに算出する。ベクトル処理部16は、目標コイル電流に対応する目標ベクトルの長さを、上限電流算出部15が算出した各相の上限値の内の最小のものに対応する長さ以内になるように補正する。相電流変換部17は、補正後の目標ベクトルに基づいて各相電流値を算出し、インバータ3を介してモータ2の各相電流を制御する。
(もっと読む)
モータ制御装置
【課題】位置センサレスのモータ制御装置において、誤検出が低減で飢渇高精度の欠相検出手段を提供すること。
【解決手段】同期モータ3を駆動するための3相交流電圧を出力するインバータ主回路2と、同期モータの各相に流れる電流を検出する電流検出手段6を備えたモータ制御装置において、所定の指令値により同期モータを運転する同期運転モードと、位置フィードバックによる運転モードとを備え、同期運転モード中に前記電流検出手段で検出した電流値に基づいて欠相を検出する欠相検出手段10を備える。
(もっと読む)
モータ制御装置
【課題】スイッチング損失およびサージ電圧を抑制しつつ、小型化、および製造コストの低減化を達成することのできるモータ制御装置を提供する。
【解決手段】第1のFET51と第2のFET52との接続点14が、第1のリレー11を介して電動モータ1のU相界磁巻線3Uに接続されている。接続点14と第2のFET52との間に第1のインダクタ21が接続されている。制御部5は、第1のリレー11に回生電流i1が流れているときに、第1のリレー11をターンオフする。これにより、第1のインダクタ21に、回生電流i1の変化を妨げる方向に誘起電圧Vbが生じる。この結果、第1のFET51のソース電位が高くなるので、第1のFET51に端子間電圧が低減される。第1のFET51に端子間電圧が低減した状態で、第1のFET51がターンオンされる。
(もっと読む)
電力変換装置
【課題】エンジン発電機による電動機駆動システムにおいて、電力変換器の高調波や直流電圧変動の影響によって、d軸とq軸の電圧外乱による電流脈動の強めあい現象により軸振動が増加し、dq軸間干渉の影響により振動やd軸電流が増加する恐れがある。
【解決手段】エンジン発電機システムの電力変換器105において、発電機104の回転子磁束方向のd軸電流に含まれる振動成分の位相が、発電機104の回転電気角周波数に含まれる同一周波数の振動成分の位相に対し、90度以上進むようにd軸電圧調整手段117により発電機104を制御するためのd軸電圧Vd*をΔVd*調整し、さらに、q軸電流に含まれる振動成分の位相が、発電機104の回転電気角周波数に含まれる同一周波数の振動成分の位相に対し、90度以上進むようにq軸電圧調整手段118によりq軸の電圧Vq*をΔVq*調整する。
(もっと読む)
インバータ装置及びインバータ装置のティーチング方法
【課題】機械式ブレーキを備えるモータ駆動システムについてブレーキ開遅れ時間を得るためのティーチング動作を行う場合に、より精度が高い結果を得る。
【解決手段】実施形態のインバータ装置によれば、設定手段は、制御部がモータの起動に伴って実行するブレーキの開制御をモータの可変速制御と連携して行なう際に、インバータ回路を介して検出される相電流に基づき演算により推定したモータの回転周波数の変化に基づき機械式ブレーキの開制御に使用されるブレーキ制御データを設定する際に、モータが停止して機械式ブレーキが閉じた状態で出力トルクを上昇させるよう制御部に指令を与え、推定されるモータの回転周波数の平均値を求め、その平均値に前記回転周波数の所定の変化分を加えたものを判定周波数として設定する。そして、ブレーキ開指令を出力するとブレーキ開遅れ時間の計測を開始し、モータの回転周波数が判定周波数以上になるまでの時間をブレーキ開遅れ時間として計測し当該時間を記録する。
(もっと読む)
モータ制御装置、モータ制御方法
【課題】モータを精度良く制御することを可能にするモータ制御装置、及びモータ制御方法を提供することを目的としている。
【解決手段】電流指令値から、電圧指令値を生成し、モータに流れる検出電流によりフィードバック制御するモータ制御装置であって、モータが一定速度で回転されているとき、d軸電流指令値及びq軸電流指令値を各々零に設定する補正制御部と、電流指令値と検出電流との偏差の積分値を生成する電流制御部と、生成された積分値を測定する積分値測定部と、を備え、補正制御部は、測定された積分値が予め定められている範囲内の値となるように調整することで前記モータの回転位置に対する補正値を調整する。
(もっと読む)
回転電機制御システム
【課題】回転電機制御システムにおいて、電流センサの検出電流値に誤差が重畳している場合でも、過電流及び過電圧の発生を有効に防止することである。
【解決手段】回転電機制御システム10は、回転電機であるモータジェネレータMG2と、リアクトル20を含むDC/DCコンバータ14と、DC/DCコンバータ14に接続された平滑コンデンサC1,C2と、予め設定されたPWM条件下で電流フィードバックを用いるPWM制御方式でインバータ16を制御する制御部18とを含む。制御部18は、LC共振回路の共振周波数領域の周波数とモータジェネレータMG2のパワー変動の周波数とが一致したときに、PWM制御で電流フィードバックを行う場合のフィードバックゲインを、通常時に使用する通常時ゲインよりも低下させるゲイン低下部であるゲイン決定部30を有する。
(もっと読む)
回生型高圧インバータ
【課題】本発明は、従来の直列型H−ブリッジ高圧インバータに回生運転が可能な能動整流部を有する回生型単位電力セルを混合して、部分的な回生運転ができるようにする部分回生型高圧インバータを提供する。
【解決手段】本発明によるインバータは、直列型H−ブリッジ高圧インバータの単位電力セルの入力端構造を変更して回生運転が可能にし、制動抵抗(dynamic braking resistor)を要しないため、DCリンクキャパシタのサイズを従来の高圧インバータより減らすことができる。
(もっと読む)
電動機の制御装置
【課題】非干渉制御を行っても、振動をより低減させることができる電動機の制御装置を提供する。
【解決手段】本制御装置では、回転子角速度ω[rad/s]の振動周波数におけるゲインが小さくなるように、回転子角速度ω[rad/s]をゲイン調整後角速度ω’[rad/s]に変換するゲイン調整部105を備える。非干渉制御を行うために、非干渉d軸電圧指令値Vd[V]および非干渉q軸電圧指令値Vq[V]を求める非干渉制御部104を備える。非干渉制御部104は、ゲイン調整後角速度ω’[rad/s]、d軸PI出力電圧指令値Vd’[V]およびq軸PI出力電圧指令値Vq’[V]に基づいて求める。更に、非干渉d軸電圧指令値Vd[V]と非干渉q軸電圧指令値Vq[V]から変換された三相電圧指令値Vu、Vv、Vw[V]に基づいて、インバータ2を制御するPWM信号PWMを生成するPWM変換部109とを備える。
(もっと読む)
ブラシレスモータ用制御装置およびそれを備えた洗濯機
【課題】簡単、安価な構成および簡単な演算での回転位置センサの取付誤差を補正して、振動、騒音を低減できるブラシレスモータ用制御装置およびそれを備えた洗濯機を提供する。
【解決手段】ブラシレスモータ用制御装置5は、ホールセンサ55u,55v,55wの出力に基づいて、複数のホールセンサ55u,55v,55wの複数の間隔データを得ると共に、複数の間隔データの平均値を求める誤差検出部80とを備える。上記複数の間隔データおよび平均値はセンサ誤差メモリ部65に記憶される。センサ誤差補正部66は、上記間隔データおよび平均値に基づいて、ホールセンサ55u,55v,55wの間隔のズレを補正する。これにより、角速度推定部67は、ホールセンサ55u,55v,55wの間隔のズレを補正した結果を示す信号に基づいて、ブラシレスモータ4のロータの回転速度を正確に求めることができる。
(もっと読む)
電動パワーステアリング装置
【課題】ステアリングホイールの操舵をアシストする通常制御時に、電源リレーのショート故障を診断することの可能な電動パワーステアリング装置を提供する。
【解決手段】電源からインバータ回路を経由してモータに電力を供給する配線に設けられた電源リレーは、異常時に電源からインバータ回路への通電を遮断する。マイコンは、ステアリングホイールの操舵をアシストする通常制御時に、ステアリングホイールが操舵されていないとき(S4:NO)、電源リレーのショート故障を診断する。EPSは、ステアリングホイールの操舵がされていない時に電源リレーにより通電を遮断することで(S5)、ステアリングホイールの操舵のアシストに影響を与えることなく、電源リレーのショート故障を診断することができる。
(もっと読む)
ロボットシステム
【課題】モータの駆動を制御する駆動制御手段の制御内容を変更することなく、高トルク運転時にモータに対して十分な電力を供給可能とするか、または減速動作時にモータから生じる回生エネルギーを有効利用可能とする。
【解決手段】昇降圧回路29は、入力電圧を昇圧して出力する昇圧動作、入力電圧を降圧して出力する降圧動作および入力電圧をそのまま出力する非昇降圧動作のいずれかの動作を実行する。電源制御部26は、エコモードに設定されると、モータMの動作状態にかかわらず、降圧動作を実行するように昇降圧回路29の動作を制御する。電源制御部26は、トルク重視モードに設定されると、バス電圧の検出値に基づいてモータMが加速動作されていると考えられる期間に昇圧動作を実行するとともに、その期間を除く期間には非昇降圧動作を実行するように昇降圧回路29の動作を制御する。
(もっと読む)
ロボットシステム
【課題】モータの駆動を制御する駆動制御手段の制御内容を変更することなく、高トルク運転時にモータに対して十分な電力を供給することができるとともに、減速動作時にモータから生じる回生エネルギーを有効利用することを可能とする。
【解決手段】昇降圧回路29は、入力電圧を昇圧して出力する昇圧動作、入力電圧を降圧して出力する降圧動作、入力電圧の供給が遮断する電源遮断動作などを実行する。電源制御部26は、バス電圧の検出値に基づいて、モータMが加速動作状態であると判断される期間には昇圧動作を実行し、減速動作状態であると判断される期間には電源遮断動作を実行し、それらの期間を除く期間には降圧動作を実行するように昇降圧回路29の動作を制御する。
(もっと読む)
同期機の磁極位置検出装置
【課題】直流電圧源の直流電圧の変動に拘わらず所望の磁極位置検出精度が得られる同期機の磁極位置検出装置を得ることを目的とする。
【解決手段】演算手段2aは、直流電圧源5の直流電圧の変動に拘わらず所望の磁極位置検出精度が得られるよう、パルス幅決定部22aにより直流電圧検出値Vdcに応じてパルス幅tpおよびパルス休止幅tnをtpおよびtnの関係式に基づき変化させるようにするとともに、サンプリングタイミングは直流電圧検出値Vdcに拘わらず各電圧ベクトルのパルス幅tp終端時点に固定するよう制御するようにした。
(もっと読む)
1 - 20 / 1,078
[ Back to top ]